") 基于CAN總線技術實現(xiàn)絕對式光電軸角編碼器的設計及應用
基于CAN總線技術實現(xiàn)絕對式光電軸角編碼器的設計及應用
1 引 言
絕對式光電軸角編碼器是一種數(shù)字測角裝置,實時測量轉(zhuǎn)軸所處的角位置及角速度,它把軸角信息轉(zhuǎn)換成度、分、秒形式的數(shù)字代碼,與控制系統(tǒng)中的總線連接可實現(xiàn)實時測量。它具有工作可靠性高,抗干擾能力強,精度高,斷電記憶等優(yōu)點。在靶場設備、數(shù)字經(jīng)緯儀、雷達及一些大型軍用設備等數(shù)字化測量跟蹤和定位系統(tǒng)中得到廣泛應用。
在這些實際應用的控制系統(tǒng)中由于各分系統(tǒng)傳感器和探測器輸出的數(shù)據(jù)結構不同,絕對式光電軸角編碼器會用到不同的內(nèi)部數(shù)據(jù)通信方式,主要有RS232、RS485/488串口,并口等。但在具體工程應用項目中,上述通信方式常會受到傳輸距離、通信速率等方面限制。近幾年來串行通信快速發(fā)展,出現(xiàn)了多種控制系統(tǒng)現(xiàn)場總線形式,CAN總線就是其中應用最為廣泛的一種,它是控制器局域網(wǎng)總線的簡稱,是一種有效支持分布式控制和實時控制的串行通信網(wǎng)絡。由于CAN總線的高性能、高可靠性及獨特的設計,已成為目前國內(nèi)外普及和實時性最高的現(xiàn)場總線。控制系統(tǒng)中內(nèi)部通信方式的發(fā)展變化,使得用作測量角位移和角速度的編碼器要提供CAN總線接口以滿足整個控制系統(tǒng)的現(xiàn)場總線設計要求。
2 編碼器工作原理和數(shù)據(jù)傳輸
2.1工作原理
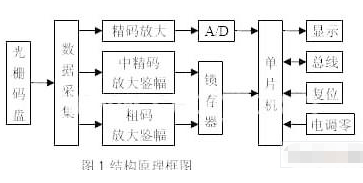
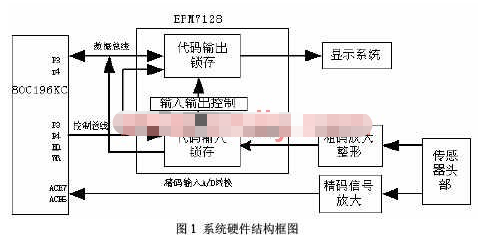
編碼器由數(shù)據(jù)采集裝置和數(shù)據(jù)處理裝置兩部分組成。結構原理框圖如1所示。單片機是編碼器電路系統(tǒng)的核心部分,它將編碼器的信號(粗碼、中精碼、精碼)采集到后,經(jīng)精碼細分、碼道校正、數(shù)字量相加、電調(diào)零、度分秒轉(zhuǎn)換等軟件處理,最后顯示及實現(xiàn)與控制系統(tǒng)接口。
2.2數(shù)據(jù)傳輸
編碼器與控制系統(tǒng)的數(shù)據(jù)傳輸可以采用并行和串行兩種方式。并行傳輸通過并口傳遞數(shù)據(jù),每位數(shù)據(jù)需要數(shù)據(jù)電纜一芯,例如對于24位分辨率的編碼器就需要一根24芯的電纜,因此使用空間受到限制,僅適用于短距離傳輸和特殊要求的場合。串行傳輸,數(shù)據(jù)信息通過一根雙絞線實現(xiàn)串行傳送,根據(jù)不同通信協(xié)議再加些附加位實現(xiàn)糾錯等功能,這一功能可擴大應用于數(shù)據(jù)總線系統(tǒng)中。串行傳輸用線少,硬件少,成本低,傳輸距離遠,數(shù)據(jù)安全可靠。
2.3 提出編碼器CAN總線接口
在對各種現(xiàn)場總線的綜合比較中,基于CAN總線構建的通信系統(tǒng)具有很多優(yōu)異的特性:數(shù)據(jù)信號采用差分電壓傳輸;總線傳輸介質(zhì)可用雙絞線、同軸電纜和光纖;可以多主方式工作,通信方式靈活;可以點對點、點對多點及全局廣播方式傳送接收數(shù)據(jù);網(wǎng)絡上的節(jié)點信息可分成不同的優(yōu)先級,滿足不同的實時要求;采用非破壞性總線仲裁技術;數(shù)據(jù)采用短幀結構,每一幀為8Byte,數(shù)據(jù)出錯率低;通信協(xié)議中數(shù)據(jù)鏈路層的MAC子層具有嚴格的錯誤檢測能力;具有國際標準,開放性好。因此,在對光電跟蹤系統(tǒng)內(nèi)部通信方式改造中采用CAN總線作為數(shù)據(jù)通信總線結構,進而提出編碼器CAN總線接口。
3 編碼器CAN總線接口在光電跟蹤系統(tǒng)中的應用
3.1編碼器用于光電跟蹤系統(tǒng)位置檢測
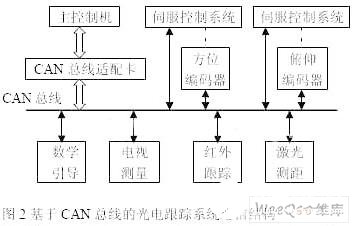
絕對式光電軸角編碼器是光電跟蹤系統(tǒng)中光電跟瞄架測量方位角和俯仰角角度傳感器,將光電跟蹤系統(tǒng)內(nèi)部總線結構改造為CAN總線通信方式,編碼器的CAN總線接口發(fā)揮其接口靈活,節(jié)省線路的特點,同時它本身帶有微處理器,可以作為系統(tǒng)中的一個智能節(jié)點,直接向其他設備發(fā)送遠程幀,實現(xiàn)智能控制。圖2為基于CAN總線的光電跟蹤系統(tǒng)通信結構圖。光電跟蹤系統(tǒng)使用CAN總線單一串行總線結構代替多種通信方式的并行結構,兩個光電編碼器測得的方位角和俯仰角經(jīng)總線發(fā)送到主控制機,主控制機將數(shù)據(jù)進行相應處理后,通過總線控制伺服控制系統(tǒng),所有的分系統(tǒng)都可以通過一對雙絞線連接在一起,簡化了系統(tǒng)布線,提高整個系統(tǒng)總線利用率、數(shù)據(jù)傳輸實時性和系統(tǒng)擴充性,同時誤碼率大大降低。
3.2 編碼器節(jié)點CAN總線接口硬件組成
CAN總線接口主要有單片機、CAN總線控制器、CAN總線驅(qū)動器及光電隔離等硬件組成。CAN總線通信接口具體電路如圖3所示。
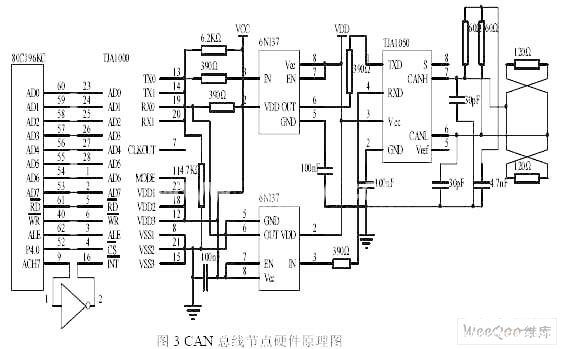
單片機選擇Intel80C196KC, 它是16位嵌入式微控制器,更適合復雜的實時控制場合,它同時負責對編碼器的數(shù)據(jù)處理和對CAN總線節(jié)點的初始化。CAN控制器選擇Philips半導體公司的SJA1000,實現(xiàn)總線與主控機(控制計算機)之間數(shù)據(jù)通信的接口,支持CAN2.0A和CAN2.0B協(xié)議,有擴展64字節(jié)接收緩沖器,支持先進先出(FIFO)原則,支持11位和29位標識碼,通信位速率可達1Mbps,可以工作在BasicCAN模式和PeliCAN模式。CAN總線驅(qū)動器選擇Philips的TJA1050,它是高速CAN總線驅(qū)動器,提供CAN控制器和物理總線之間的接口,實現(xiàn)對CAN總線的差動發(fā)送和接收功能,具有強電磁干擾下,寬共模范圍的差動接收能力,輸入電平與3.3V器件兼容,未上電節(jié)點不會干擾總線。加入TJA1050能夠保證數(shù)據(jù)的高速通信。為了安全性和提高抗干擾能力,利用TJA1050對稱性能好的特點,使用分離終端。CANH和CANL與地之間并聯(lián)了兩個30pF的小電容,起到濾除總線上的高頻干擾和一定的防電磁輻射能力。為了進一步提高系統(tǒng)的抗干擾能力,在CAN控制器SJA1000和CAN驅(qū)動器TJA1050之間使用了高速光耦6N137構成隔離電路,實現(xiàn)電流隔離接法,6N137兩側(cè)電源VCC和VDD完全隔離,這樣可以防止線路間的串擾,同時在總線兩端要接2個120Ω的總線阻抗匹配電阻。
3.3節(jié)點軟件設計
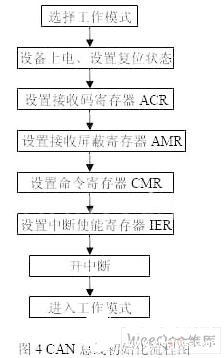
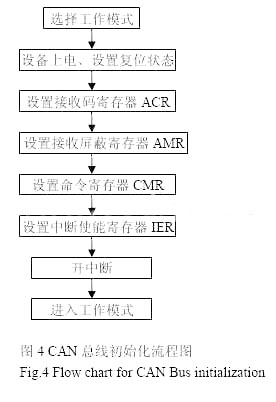
絕對式光電軸角編碼器的角度信息(度、分、秒)從CAN控制器發(fā)送到CAN總線或從CAN總線到CAN接收緩沖器都是由SJA1000總線控制器自動完成的。它的CAN總線接口通信程序由初始化子程序、發(fā)送子程序和接收子程序構成。首先根據(jù)實際系統(tǒng)需要選擇CAN總線工作模式,這里選擇PeliCAN模式,12MHz晶振,總線數(shù)據(jù)傳輸速率設為500Kbits/s,各個總線節(jié)點要設置相同的數(shù)據(jù)傳輸速率,以保證正常通信。判斷SJA1000與單片機物理連接可靠,然后初始化SJA1000控制器,在SJA1000復位模式下,設定各個寄存器的初始狀態(tài)。初始化流程圖如圖4。實現(xiàn)數(shù)據(jù)的發(fā)送和接收由發(fā)送子程序和接收子程序完成,由報文ID判斷節(jié)點數(shù)據(jù)的流向,發(fā)送數(shù)據(jù)時,報文ID接收標志位段的設置原則為:需要接收的節(jié)點其相應的ID位為0,其余位為1 。接收數(shù)據(jù)時則相反,通過ID判斷是否為發(fā)送給自己的信息,是則接收,不是濾除。
4 結束語
CAN總線作為現(xiàn)場設備級的通信總線,有很高的可靠性和性能價格比,帶有CAN總線接口的絕對式光電軸角編碼器使它更加靈活運用于控制系統(tǒng)中。
責任編輯:gt
-
控制器
+關注
關注
112文章
16203瀏覽量
177403 -
編碼器
+關注
關注
45文章
3595瀏覽量
134156 -
CAN總線
+關注
關注
145文章
1936瀏覽量
130631
發(fā)布評論請先 登錄
相關推薦
80C196 單片機和CPLD在光電軸角編碼器中的應用
絕對式三級組合光電軸角編碼器
光電軸角編碼器的細分誤差快速測量系統(tǒng)
光電軸角編碼器的細分誤差快速測量系統(tǒng)
基于MCU+CPLD雙片結構實現(xiàn)新型光電軸角編碼器的應用方案





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論