 相控陣天線方向圖:柵瓣和波束斜視
相控陣天線方向圖:柵瓣和波束斜視
簡介
關于相控陣天線方向圖,我們將分三部分介紹,這是第二篇文章。 在第一部分中,我們介紹了相控陣轉向概念,并查看了影響陣列增益的因素。在第二部分,我們將討論柵瓣和波束斜視。柵瓣很難可視化,所以我們利用它們與數字轉換器中信號混疊的相似性,將柵瓣想象為空間混疊。接下來,我們探討波束斜視的問題。波束斜視是我們使用相移,而不是使用真實時間延遲來使波束轉向時,天線在頻段范圍內無聚焦的現象。我們還將討論這兩種轉向方法之間的權衡取舍,并了解波束斜視對典型系統的影響。
柵瓣簡介
到目前為止,我們只見過元件間隔為d = λ/2這種情況。圖1開始說明為什么λ/2的元件間隔在相控陣中如此常見。圖中共顯示兩種情況。首先,是藍色線條,重復顯示第1部分圖11中的30°圖。接下來,d/λ間隔增加到0.7,以顯示天線方向如何變化。注意,隨著間隔增加,波束寬度減小,這是一個積極現象。零值間隔減小使它們的距離更接近,這也可以接受。但是現在出現了第二個角度,在本例中為–70°,在該角度下出現了全陣列增益。這是最為不利的情況。這種天線增益復制被定義為一個柵瓣,可以被認為是空間混疊。
圖4.θ = 50°、N = 32、d = 17 mm且Φ = 10 GHz時,柵瓣開始在水平方向出現。
通過限制最大掃描角度,可以自由地擴展元件間隔,增加每個通道的物理尺寸,以及擴展給定數量的元件的孔徑。例如,可以利用這個現象,為天線分配相當狹窄的預定義方向。元件增益可以增大,以在預先定義的方向上提供方向性,元件間隔也可以增大,以實現更大孔徑。這兩種方法都能在較窄的波束角度下獲得較大的整體天線增益。
注意,方程3表示最大間隔為一個波長,即使在零轉向角度下也是如此。在一些情況下,如果柵瓣不出現在可見半圓內即可。以地球同步衛星為例,會以機械軸線校準為中心,按9°的轉向角度覆蓋整個地球。在這種情況下,只要柵瓣不落在地球表面就可以。因此,元件間隔可以達到幾個波長,使得波束寬度更窄。
還有一些值得注意的天線結構,試圖通過形成不一致的元件間隔來克服柵瓣問題。這些被歸類為非周期陣列,以螺旋陣列為例。由于機械天線構造的原因,我們可能希望有一個通用的可以擴展為更大陣列的構建模塊,但是,這會形成一致的陣列,會受所述的柵瓣條件影響。
波束斜視
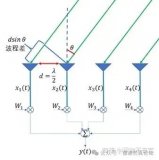
在第1部分中,我們開頭描述了在波峰接近元件陣列時,如何基于相對于軸線校準的波峰角度θ在元件之間出現時間延遲。對于單一頻率,可以用相移代替時間延遲來實現波束轉向。這種方法適用于窄帶波形,但對于通過相移產生波束轉向的寬帶波形,波束可能轉移方向(與頻率呈函數關系)。如果我們記得時間延遲是線性相移與頻率之間的關系,則可以直觀地解釋。所以,對于給定的波束方向,要求相移隨頻率變化。或者相反,對于給定的相移,波束方向隨頻率變化。波束角度隨頻率變化的狀況,被稱為波束斜視。
還考慮到在軸線校準位置θ = 0時,沒有跨元件的相移,因此不會產生任何波束斜視。因此,波束斜視的量必須與角度θ和頻率變化呈函數關系。圖5顯示一個X頻段示例。在本例中,中心頻率為10 GHz,調制帶寬為2 GHz,且很顯然波束隨頻率和初始波束角度的變化而改變方向。
圖5.32元件線性陣在元件間隔為λ/2時,在X頻段上的波束斜視示例。
波束斜視可以直接計算。使用公式1和公式2,可以計算得出波束方向偏差和波束斜視
此公式如圖6所示。在圖6中,顯示的f/f0比率是有意的。前一個方程的倒數(f0/f)提供了一種更容易的方法,可以更直觀地表示相對于中心頻率的變化。
圖6.幾種頻率偏差下的波束斜視和波束角度。
關于波束斜視的幾點觀察發現:
波束角度與頻率的偏差隨著波束角度偏離軸線校準的角度增大而增大。
低于中心頻率的頻率比高于中心頻率的頻率產生更大的偏差。
低于中心頻率的頻率會使波束更加遠離軸線校準。
波束斜視考慮
波束斜視,即轉向角度與頻率的偏差,是由相移來實現時間延遲造成的。用真實時間延遲單元來執行波束轉向則不會出現此問題。
既然波束斜視問題如此明顯,為什么還有人使用移相器,而不是時間延遲單元呢?一般而言,這歸因于設計簡單,以及移相器和時間延遲單元的IC可用性。時間延遲以某些傳輸線的形式實現,所需的總延遲時間與孔徑大小呈函數關系。到目前為止,大多數可用的模擬波束成型IC都是基于相移,但也出現了一些真實時間延遲IC系列,它們在相控陣中更加常見。
在數字波束成型中,真實時間延遲可以采用DSP邏輯和數字波束成型算法實現。因此,對于每個元件都數字化的相控陣架構,它本身就可以解決波束斜視問題,并提供最高的編程靈活性。但是,這種解決方案的功能、尺寸和成本都會造成問題。
在混合波束成型中,子陣采用模擬波束成型,全陣采用數字波束成型。這可以提供一些值得考慮的波束斜視減少。波束斜視只受子陣影響,子陣的波束寬度更寬,因此對波束角度偏差的容忍度更大。因此,只要子陣的波束斜視是可容忍的,即可在后接真實時間延遲(數字波束成型)的子陣內采用帶移相器的混合波束成型結構。
總結
以上就是有關相控陣天線方向圖三部分中的第2部分內容。在第1部分,我們介紹了波束指向和陣列因子。在第2部分,我們討論柵瓣和波束斜視的缺點。在第3部分,我們將討論如何通過天線變窄縮小旁瓣,并讓您深入了解移相器量化誤差。
-
波束
+關注
關注
0文章
54瀏覽量
15744 -
相控陣天線
+關注
關注
0文章
44瀏覽量
9007
發布評論請先 登錄
相關推薦
相控陣雷達電源芯片詳解
分析DCDC4644電源芯片在F-35戰機相控陣雷達的應用
DCDC 4644 電源芯片在相控陣雷達的應用
天馬微電子推出低成本相控陣天線及電子設備
相控陣雷達技術的開發方案

相控陣雷達的原理和分類 相控陣雷達的特點
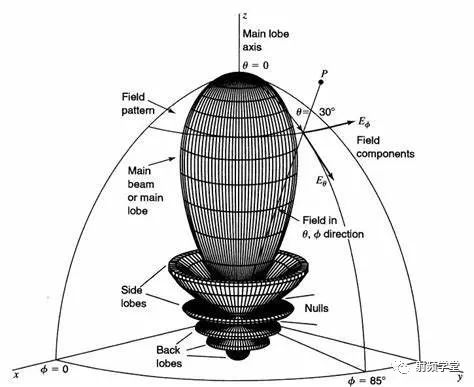
關于天線方向圖的參數詳解
相控陣雷達中和差波束目的和差波束原理介紹





 工商網監
工商網監
評論