") 仙知激光SLAM導(dǎo)航融合多傳感器算法,讓移動機器人更穩(wěn)定、更智能
仙知激光SLAM導(dǎo)航融合多傳感器算法,讓移動機器人更穩(wěn)定、更智能
伴隨工業(yè)自動化、智能化發(fā)展,移動機器人在制造業(yè)領(lǐng)域應(yīng)用已經(jīng)較為普遍,并向其它行業(yè)逐漸延伸。近年來,隨著智能制造、精益生產(chǎn)及柔性化生產(chǎn)需求日益提升,對移動機器人技術(shù)要求也在不斷攀升。
目前市場上常見的移動機器人導(dǎo)航方式有磁條導(dǎo)航、二維碼導(dǎo)航、激光反光板導(dǎo)航和激光自然輪廓導(dǎo)航幾種形式,但是單一依靠一個或兩個傳感器來進行定位導(dǎo)航,總是難以應(yīng)對復(fù)雜的使用場景需求。
傳統(tǒng)的磁條導(dǎo)航移動機器人,其工作原理是在地面鋪設(shè)磁條,并使磁條磁場的方向一致,通過磁傳感器感應(yīng)磁信號實現(xiàn)移動機器人的導(dǎo)引。在啟動磁導(dǎo)移動機器人時,需要注意機器人是否在導(dǎo)引磁條的中間,左右偏差不能大于10cm;而且移動機器人必須按照鋪設(shè)的磁條軌道進行行駛,靈活性很差,難以適應(yīng)當(dāng)前柔性化生產(chǎn)需求。
二維碼導(dǎo)航屬于視覺識別,通過攝像頭(二維碼采集器)識別鋪設(shè)在地面上的二維碼,并通過慣導(dǎo)模塊(陀螺儀)感應(yīng)移動機器人的位姿,將采集到的信息反饋給控制器。二維碼導(dǎo)航方式的優(yōu)勢在于相對磁導(dǎo)來說,在鋪設(shè)、改變路徑上相對容易,抗聲光干擾性強;它的弊端在與地面上的二維碼容易磨損,需要定期維護,對陀螺儀的精度與壽命有較高的要求,對場地平整度也要求較高。
激光反光板導(dǎo)航,它的工作原理是在移動機器人行駛路徑的周圍安裝位置精確的激光反射板,通過激光雷達發(fā)射激光束,同時采集由反射板反射的激光束來確定其當(dāng)前的位置和方向,并通過連續(xù)的三角幾何運算來實現(xiàn)機器人的導(dǎo)航。它的優(yōu)勢在于定位精確,安裝反光板相對靈活;它的劣勢在于依舊沒有擺脫反光柱輔助定位設(shè)施的依賴,對反光板安裝精度要求高,對地面環(huán)境、光線環(huán)境有一定要求。
激光自然輪廓導(dǎo)航則不需要磁條、二維碼、反光柱等輔助定位設(shè)施,它采用SLAM技術(shù),利用激光雷達對周圍環(huán)境持續(xù)發(fā)射脈沖獲取點云信息,與事先掃描、存儲、上傳的地圖進行匹配從而實現(xiàn)定位導(dǎo)航。它的優(yōu)勢在于對使用環(huán)境無需任何改造,自主靈活性強、定位精準(zhǔn),適應(yīng)靈活多變的柔性化生產(chǎn)搬運需求;但也存在一定的課題,在長廊、高動態(tài)等參照物較少的復(fù)雜環(huán)境中容易定位丟失。
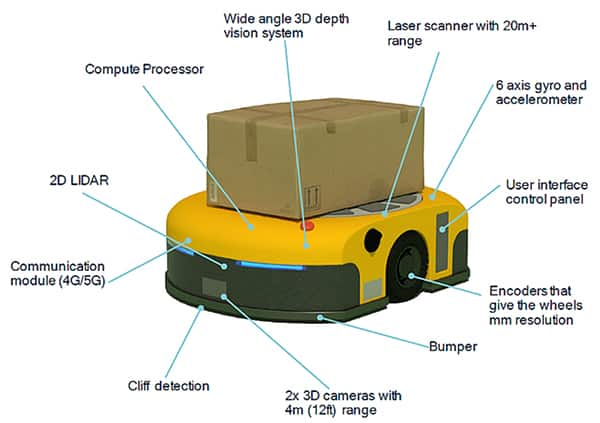
比較上述四種導(dǎo)航方式,會發(fā)現(xiàn)激光自然輪廓導(dǎo)航是最靈活、最便捷的導(dǎo)航方式,但依然有改進的空間。仙知機器人作為一家以控制和調(diào)度為核心的高新技術(shù)企業(yè),便創(chuàng)造性的解決了這一難題,在激光自然輪廓導(dǎo)航的基礎(chǔ)上,融合了激光反光板導(dǎo)航、二維碼導(dǎo)航、慣導(dǎo)、攝像頭等,采用多傳感器融合算法讓移動機器人定位更精確、性能更強大,并具有環(huán)境普適性,能夠應(yīng)對長廊、高動態(tài)的復(fù)雜環(huán)境及地面坑洞等。
在長廊、高動態(tài)的環(huán)境中,可自由切換至激光反光板導(dǎo)航、二維碼導(dǎo)航,確保定位不會丟失;在地面環(huán)境相對較差的情況下,可選配3D相機對地面坑洞、立體障礙物等進行識別檢測,并根據(jù)參數(shù)配置讓移動機器人選擇停障或繞行。
另外,為保證移動機器人使用安全,仙知機器人還擁有一系列方法來確保移動機器人在使用過程中機器人、人員和貨物的安全。如雙激光解決方案,通過雙激光完成移動機器人周圍360°全方位的安全檢測;在基于SRC的激光SLAM自動叉車解決方案中,通過3D相機、紅外傳感器、超聲、安全觸邊等進行安全防護,確保自動叉車在作業(yè)過程中人員和貨物的安全。
同時,配合仙知自主研發(fā)的統(tǒng)一資源調(diào)度系統(tǒng)SRD、一站式實施工具Roboshop Pro,能讓各類移動機器人發(fā)揮出最佳性能。通過SRD進行與工廠的ERP、MES、WMS、WCS等系統(tǒng)進行無縫對接,并將移動機器人與工廠的電梯、電動門、生產(chǎn)設(shè)備連接起來,讓移動機器人在工廠車間、倉庫進行靈活運轉(zhuǎn),高效完成作業(yè)任務(wù),助力工廠打造真正意義上的數(shù)字化、智能化工廠。
有關(guān)仙知
上海仙知機器人科技有限公司,是一家以移動機器人控制與調(diào)度為核心的高新技術(shù)企業(yè)。作為一站式移動機器人方案專家,仙知機器人掌握了具有自主知識產(chǎn)權(quán)的移動機器人核心技術(shù),并在工業(yè)自動化領(lǐng)域內(nèi)擁有豐富的項目經(jīng)驗。仙知機器人致力于服務(wù)各行業(yè)集成商,并為其提供包括移動機器人控制、調(diào)度與信息管理在內(nèi)的一站式移動機器人解決方案。
目前,仙知機器人的產(chǎn)品、技術(shù)及解決方案已在汽車制造、家電制造、3C電子制造、半導(dǎo)體制造、食品煙草、電商倉儲、安防巡檢、商用服務(wù)、醫(yī)療教育等領(lǐng)域廣泛應(yīng)用。
仙知機器人積極踐行企業(yè)使命—“讓智能創(chuàng)造價值”,不斷堅持技術(shù)創(chuàng)新,并以開放包容、合作共贏的姿態(tài)攜手合作伙伴,最大程度地滿足客戶對產(chǎn)品、技術(shù)與解決方案的高品質(zhì)追求,力爭“成為機器人產(chǎn)業(yè)的創(chuàng)新者與引領(lǐng)者!”
審核編輯 黃昊宇
-
傳感器
+關(guān)注
關(guān)注
2548文章
50709瀏覽量
752108 -
移動機器人
+關(guān)注
關(guān)注
2文章
757瀏覽量
33544 -
工業(yè)機器人
+關(guān)注
關(guān)注
91文章
3353瀏覽量
92566 -
SLAM
+關(guān)注
關(guān)注
23文章
419瀏覽量
31788
發(fā)布評論請先 登錄
相關(guān)推薦
自主移動機器人如何實現(xiàn)傳感器融合
智能移動機器人系統(tǒng)方案指南

傳感器融合如何賦能自主移動機器人


智能移動機器人

移動機器人四大賦能技術(shù)及NXP解決方案,本文總結(jié)全了!
機器人高效導(dǎo)航定位背后SLAM專用芯片的崛起
海康機器人第100000臺移動機器人下線
先進傳感器提升自主移動機器人的控制能力介紹

機械臂和移動機器人兩種控制系統(tǒng)方案對比

自主移動機器人(AMR)功能和特點

富唯智能機器人集成了協(xié)作機器人、移動機器人和視覺引導(dǎo)技術(shù)
科聰料箱移動機器人整體解決方案

科聰停車移動機器人整體解決方案!






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論