 不間斷電源的并聯控制方式增強可靠性
不間斷電源的并聯控制方式增強可靠性
多模塊UPS能較靈活地實現對電源系統容量的擴展,為了增加整個電源系統的可靠性,它可以組成冗余并聯系統。 文中對目前采用的UPS并聯連接控制方式和均流控制技術進行綜述。逆變器并聯的全數字化控制方案是交流電源領域的發展趨勢。
1. 前言
不間斷電源(UPS)越來越廣泛地應用于一些重要的設備上,用它為這些設備提供恒定的電壓和頻率,例如電腦系統,通訊系統和醫院的一些儀器。如果要擴展系統容量,可以使用大容量UPS或用小容量UPS并聯這兩種方法實現。前一種方法由于初期投資大,安裝困難(比如大小,重量和系統可靠性)等原因而變得不太實際。相比之下用后一種方法來擴展系統容量并使之具有冗余性是比較容易實現的。
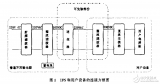
常見的冗余式供電方式有由二臺或多臺UPS電源逆變器模塊經系統控制柜并聯后再向外供電的主從供電體系,以及將并機功能直接設計在各個UPS電源單元模塊中的分散邏輯供電方案。不管采用那種方式,在正常工作時每個UPS電源模塊都要平均分配負載電流。在運行中,如果遇到其中一臺UPS電源模塊出故障時,并聯系統自動將有故障的UPS電源模塊同負載脫機。此時,全部負載由剩下的UPS電源模塊按照比例平均分擔。通過這種方式,UPS電源可以保證一直向用戶提供無幅度大小擾動和無供電時間中斷的高質量電源。顯然,采用這樣的供電系統,大大增強了UPS電源供電系統的可靠性。
要實現UPS并聯我們要完成以下兩個任務:(1) 各個UPS輸出電壓的幅值、頻率和相位要相同;(2)在輸出電壓同步的情況下,總的負載電流要在各個UPS間均衡分配,達到負載均分的目的。
2. UPS的并聯控制方式
UPS的并聯按照其連接方式一般分為集中控制,主從控制,分散邏輯控制,3C(Circular Chain Control)連接控制和無互連線控制方式。
(1)集中控制
集中控制又可以分為直接集中控制和間接集中控制。直接集中控制方式中并聯單元檢測市電的頻率和相位,向每個UPS發出同步脈沖,無市電時可由晶振產生同步脈沖通過各個UPS單元的鎖相環控制來保證各單元輸出電壓同步。并聯單元還要檢測負載的總電流,然后除以并聯單元數作為各個單元的電流參考并與本單元電流比較求出偏差并控制使其最小。不過由于存在檢測誤差,所以實際輸出電壓相位仍然可能存在誤差。為消除這一缺陷,我們可以采用間接集中控制方式。這種方式是用電流誤差ΔI和輸出電壓VO計算出ΔP和ΔQ,其中ΔP作為相位補償量,ΔQ作為電壓幅值補償量,可進一步提高并聯運行時均流的精度。
但是由于系統仍采用一個集中的控制單元,如果該控制單元出現故障時整個UPS并聯系統就會癱瘓,存在單點故障,不能真正達到高可靠性和真正冗余的目的,所以目前的并聯系統較少采用這種方式。
(2)主從控制
主從控制方式是將并聯控制單元做到每個模塊上,通過工作方式選擇開關來選擇一臺UPS做主機,其他單元作為從機。各個電源單元檢測網絡狀態信號線并由其內部主從標志來控制開關K的閉合與否。當系統中的一臺出現故障時其余單元仍可以工作,當主機出現問題時可通過切換來使得另外一臺UPS作為主機使系統繼續正常運行。通常做主機的一臺UPS處于電壓控制模式,而其他的UPS處于電流控制模式。
這種方式雖然可靠性有所增加但在其同步信號仍為公共集中同步信號,切換過程中失去同步信號可能使模塊失效,并且切換控制電路的復雜性也可能影響系統的正常運行,從而影響整個系統的性能指標,所以主從式并聯控制系統并不是較理想的并聯冗余系統。
(3)分散邏輯控制并聯
分散邏輯控制是將控制權分散,在逆變電源并聯運行時,各個電源模塊檢測出自身的有功和無功功率,通過均流母線傳送到其他并聯模塊中,與此同時電源模塊本身也接收來自其他模塊的有功無功信號進行綜合判斷確定本模塊的有功無功基準,從而確定各個模塊的電壓和同步信號(頻率和相位)的參考值。
分散邏輯控制技術即為一種獨立并聯控制方式,它采用了在各逆變電源中把每個電源模塊中的電流及頻率信號進行綜合,得出各自頻率及電壓的補償信號的控制策略。這種方式可實現真正的冗余并聯,有一個模塊故障退出時,并不影響其他模塊的并聯運行。它以可靠性高、危險性分散、功能擴展容易等良好的特性已在眾多領域中得到了廣泛的應用,并且成為計算機控制系統發展的主要方向之一,是一種比較完善的分布式智能控制技術。但當多個模塊并聯時互連線數目較多,信息量大,實現較復雜。
(4)3C(Circular Chain Control)連接
3C型并聯的思想是減少互連線的數目和信號的傳遞,以減少對其他模塊的依賴程度。它是將第一臺逆變器的輸出電流反饋信號加到第二臺逆變器的控制回路中,第二臺的輸出電流反饋信號加到第三臺,依次連接。最后一臺的輸出電流反饋信號返回到第一臺逆變器的控制回路,使并聯系統在信號上形成一個環形結構,在功率輸出方面形成并聯關系。
3C型方案在控制回路中引入其他模塊信號,加強了模塊之間的影響,使得常規方案難以控制,因此一般采用H∞理論設計控制器以解決穩定性問題。文獻中每個逆變器都由PI控制來得到快速的動態響應,用魯棒控制來得到多個模塊逆變器的魯棒性,以減少逆變器間的的相互影響。與前面的方案相比,3C型并聯方案僅引入一個模塊的電流信號,無需模擬信號平均電路,也無需知道并聯模塊數。但是控制器復雜,設計難度大,多采用數字控制系統來實現,成本較高,而且采用H∞方法設計控制器,控制器階數過高,實現較困難。
責任編輯:gt
-
電源
+關注
關注
184文章
17586瀏覽量
249495 -
逆變器
+關注
關注
283文章
4689瀏覽量
206299
發布評論請先 登錄
相關推薦
不間斷電源結構分析
不間斷電源的相關資料推薦
UPS不間斷電源的特性是什么
ups不間斷電源高頻機和工頻機UPS不間斷電源哪個好
不間斷電源的相關資料分享

不間斷電源可以充電嗎
影響不間斷電源UPS電池可靠性的因素
ups不間斷電源高頻機和工頻機UPS不間斷電源的比較

UPS不間斷電源具備哪些功能?UPS不間斷電源的5種拓撲結構
UPS不間斷電源—UPS不間斷電源維護攻略

ups不間斷電源—ups不間斷電源“罷工”了嗎?這樣解決





 工商網監
工商網監
評論