 FANUC機器人TCP三點法
FANUC機器人TCP三點法
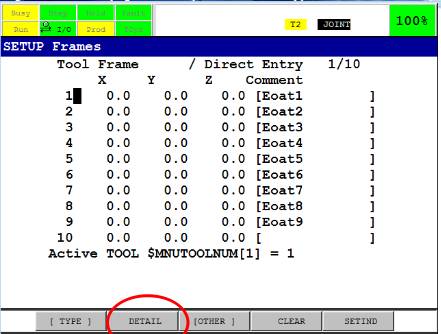
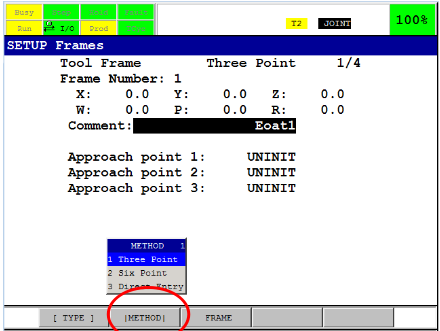
三點法設置方法
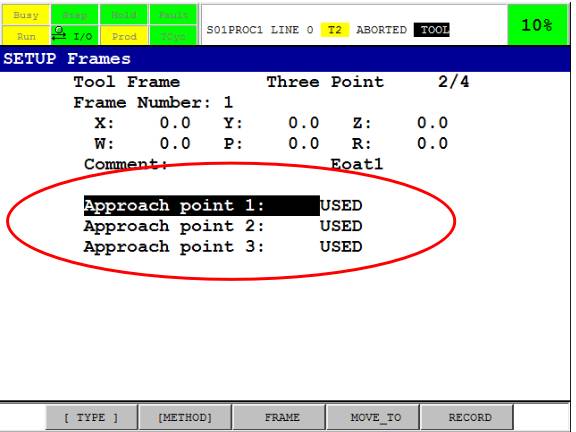
DETAIL–METHOD–回車進入三點法界面:
三點法操作步驟:
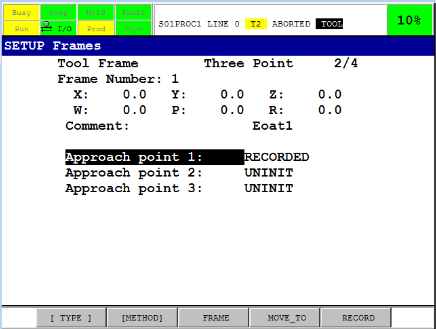
記錄接近點1
a.移動光標到接近點1(Approachpoint1);
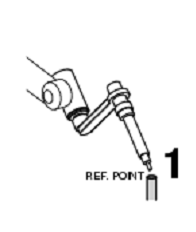
b.把示教坐標切換成全局坐標(WORLD)后移動機器人,使工具尖端接觸到基準點;
c.按【SHIFT】+F5【RECORD】(位置記錄)記錄
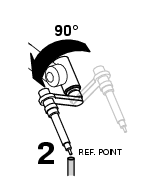
記錄接近點2
a.移動光標到接近點2(Approachpoint2);
b.把示教坐標切換成關節坐標(JOINT),旋轉J6軸(法蘭面)至少90度,不要超過360度;
c.把示教坐標切換成全局坐標(WORLD)后移動機器人,使工具尖端接觸到基準點;
d.按【SHIFT】+F5【RECORD】(位置記錄)記錄;
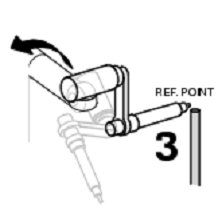
記錄接近點3
a.移動光標到接近點3(Approachpoint3);
b.把示教坐標切換成關節坐標(JOINT),旋轉J4軸和J5軸,不要超過90度;
c.把示教坐標切換成全局坐標(WORLD)后移動機器人,工具尖端接觸到基準點;
d.按【SHIFT】+F5【RECORD】(位置記錄)記錄;
當三個點記錄完成,新的工具坐標系被自動計算生成.Point1-3顯示成USED,如下圖所示:
責任編輯:xj
原文標題:FANUC機器人TCP三點法詳解,你用過嗎?
文章出處:【微信公眾號:工業機器人】歡迎添加關注!文章轉載請注明出處。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
210文章
28205瀏覽量
206532 -
TCP
+關注
關注
8文章
1350瀏覽量
78986 -
Fanuc
+關注
關注
18文章
117瀏覽量
36598
原文標題:FANUC機器人TCP三點法詳解,你用過嗎?
文章出處:【微信號:indRobot,微信公眾號:工業機器人】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
機器人的三大矩陣是什么及關系式
在機器人學中,三大矩陣主要指的是與機器人位移、速度和力相關的矩陣,它們分別揭示了機器人在不同空間(如關節空間和作業空間)之間的映射關系。這三
電容三點式振蕩電路相位條件是什么
電容三點式振蕩電路是一種常見的振蕩電路,廣泛應用于無線通信、電子測量等領域。本文將介紹電容三點式振蕩電路的相位條件,包括其基本原理、電路結構、振蕩條件、頻率特性、穩定性分析以及應用實例等方面的內容
怎么判斷電容三點式和電感三點式
在電子電路中,電容三點式和電感三點式振蕩電路是兩種常見的振蕩電路類型,它們的主要區別在于反饋元件(電容或電感)與晶體管三個極(基極、發射極、集電極)的連接方式。 一、基本概念 1. 電容三點
電容三點式和電感三點式振蕩器的原理、特點及設計方法
電容三點式和電感三點式是電子電路中常見的兩種振蕩器結構,它們在無線通信、信號發生器等領域有著廣泛的應用。 電容三點式振蕩器 1.1 原理 電容三點式振蕩器是一種利用電容和電感元件構成的
電容三點式與電感三點式振蕩器相比哪個好
電容三點式與電感三點式振蕩器各有優勢,具體哪個更好要根據實際的應用場景和需求來決定。電容三點式與電感三點式振蕩器是兩種常見的振蕩器結構,它們在無線電通信、電子測量等領域有著廣泛的應用。
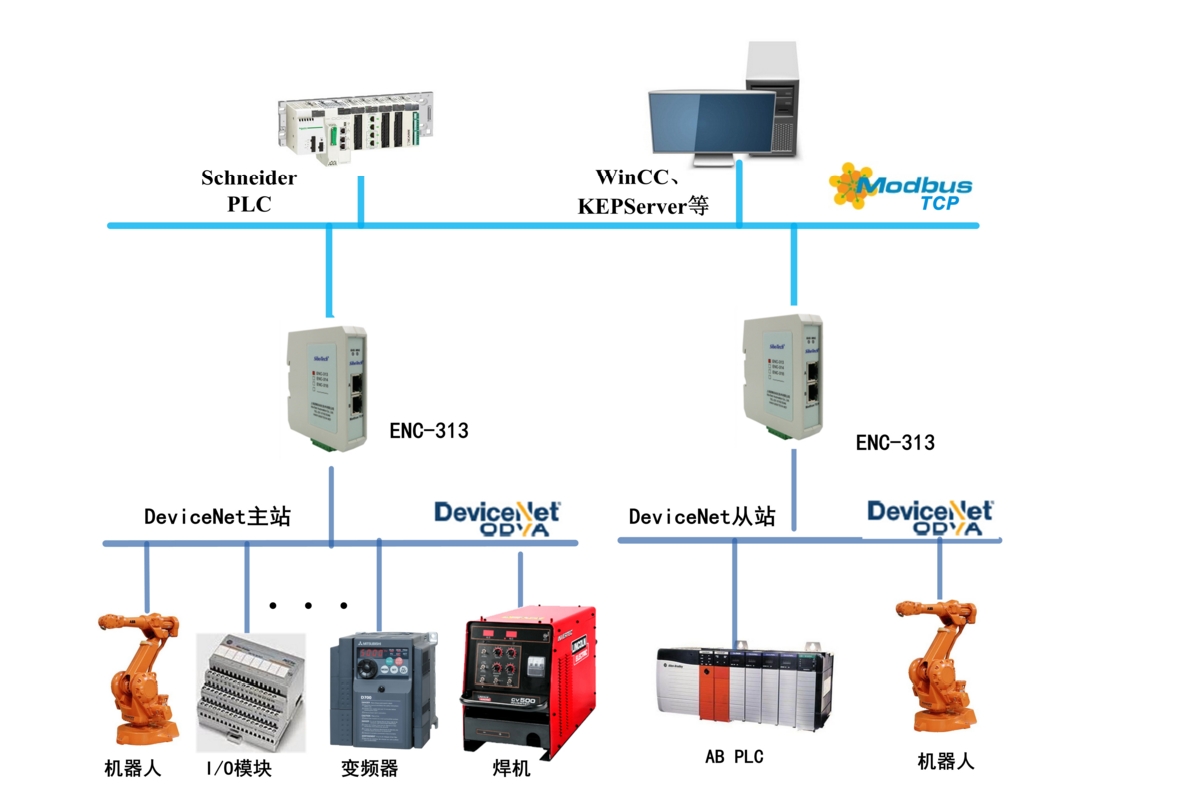
DeviceNet轉Modbus TCP網關ENC-313 讓WinCC對接上ABB機器人
,WinCC支持Modbus TCP以太網協議,兩者之間不能直接進行通訊。如何通過WinCC來控制ABB機器人成為了改項目的一大難點。 作為長期以來的合作伙伴,第一時間聯系到上海泗博尋找解決方案。最后選用了泗博DeviceNet轉Modbus
abb機器人工具坐標系問題
各位大佬請教一下,abb機器人工具坐標系用四點法,六點法,手動輸入等方式標定出的工具坐標系的Z方向與實際工具的長度不符,實際工具長度越長坐標系z方向的差距越大。比如實際工具400mm坐標系標定的Z方向是300mm,這種是什么情況
發表于 08-07 11:11
Al大模型機器人
金航標kinghelm薩科微slkor總經理宋仕強介紹說,薩科微Al大模型機器人有哪些的優勢?薩科微AI大模型機器人由清華大學畢業的天才少年N博士和王博士團隊開發,與同行相比具有許多優勢:語言
發表于 07-05 08:52
工業機器人仿真軟件有哪些
功能強大的機器人仿真和離線編程軟件,支持多種機器人品牌,如Fanuc、KUKA、ABB等。它提供了豐富的工具,如3D可視化、碰撞檢測、路徑優化等。 CoppeliaSim (前稱V-REP) :CoppeliaSim 是一款開源
abb機器人home點設置方法
ABB機器人的home點設置是機器人編程和操作中非常重要的一環,它關系到機器人的精度和穩定性。本文將詳細介紹ABB機器人home
工業機器人示教器可以通用嗎?給你5點建議
電子系統或計算機系統執行的。 ? 工業機器人示教就是編程者采用各種示教方法事先“告知”機器人所要進行的動作信息和作業信息等,這些信息主要有三大類: 1、機器人位置和姿態信息,軌跡和路徑
西門子PLC與FANUC機器人如何實現EtherNet/IP通信
示例配置要求:
?輸入/輸入 64 字節,通訊 RPI 設置 30ms
?西門子 PLC 作為掃描器,IP 地址設置為 192.168.0.2
?FANUC 機器人作為適配器,IP 地址分別設置為 192.168.0.55 和 192.168.0.56
發表于 03-12 11:04
?5070次閱讀

LabVIEW的六軸工業機器人運動控制系統
。
系統研究與算法開發:首先,項目圍繞機器人的數學模型,特別是空間位姿描述和D-H模型展開研究。在此基礎上,開發了機器人的運動學正反解算法,使用了雅克比-迭代法等先進技術。此外,還涉及了機器人
發表于 12-21 20:03





 工商網監
工商網監
評論