 CAN總線關閉對新能源汽車的功能和安全性能產生的影響
CAN總線關閉對新能源汽車的功能和安全性能產生的影響
CAN總線由其高可靠和實時性被廣泛應用于新能源汽車、軌道交通、醫療、工程機械等行業,本文介紹CAN總線關閉對新能源汽車的功能和安全性能產生的影響,并針對工程師關注的問題,提供有效的解決方案。
CAN總線Bus Off原理汽車內部掛有很多的ECU節點,當其中一個節點發生故障進入總線關閉狀態時,會很大程度上影響整車CAN網絡的通訊。例如,當汽車發生碰撞時,傳感器將電信號傳送給安全氣囊ECU,將信號進行處理,當確定需要打開安全氣囊時,ECU會立即發出點火信號,氣體發生器才會充滿氣囊,對駕駛員和乘客提供安全保護,如下圖1所示。若此時安全氣囊ECU處于總線關閉狀態,則無法正常彈出氣囊,會導致嚴重后果。
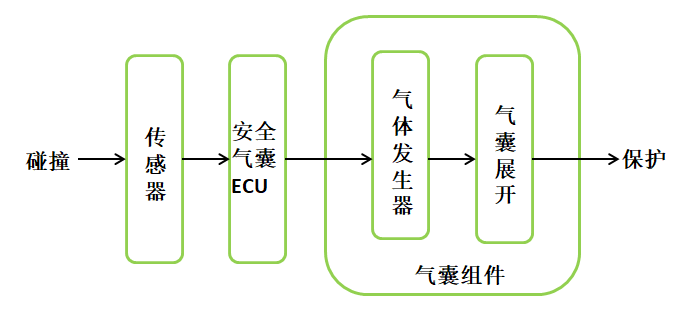
圖1 ECU工作示意圖
因此,對于新能源汽車行業工程師,了解CAN總線Bus Off原理是非常有必要的。CAN控制器可以判斷出錯誤的類型是總線上暫時的數據錯誤(如外部干擾等)還是持續的數據錯誤(如單元內部故障、驅動器故障、斷線、短路等)。由此,當總線上發生持續數據錯誤時,CAN控制器內部的錯誤計數器累積到總線關閉的閥值,可將引起此故障單元從總線上隔離出去,不參與跟總線其他節點的網絡通信。如圖2所示:
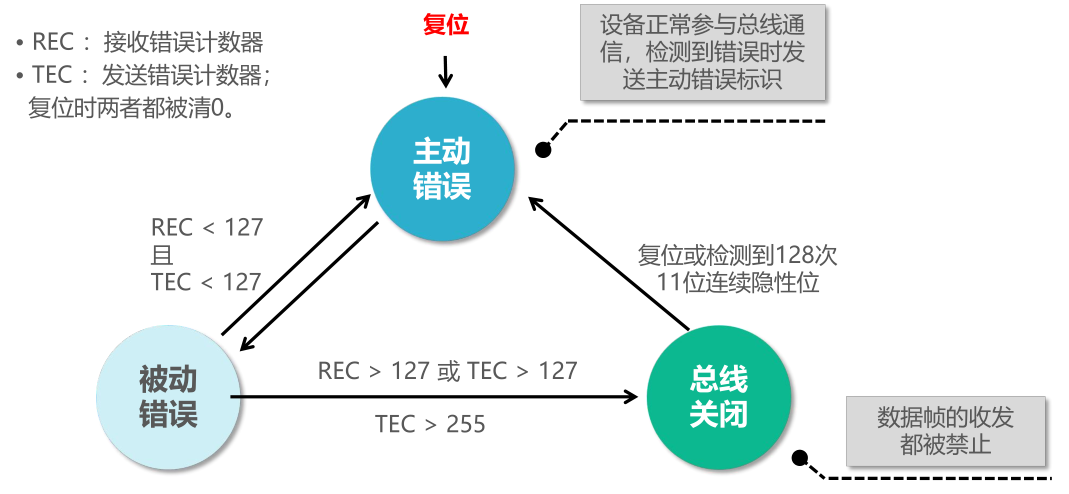
圖2 錯誤檢測機制
哪些因素會導致CAN總線Bus Off?
引起錯誤的原因大多是由物理故障引起的,主要是CAN線路產生的。其中包括:CAN_H開路、CAN_L開路、CAN_H對CAN_L短路/開路、CAN_L對VBAT短路、CAN_H對GND短路、CAN_L對GND短路、終端電阻開路等。
除了物理層線路因素,還有可能因為CAN控制器或收發器等元器件故障導致。同時,也有可能是由于CAN總線信號干擾導致的CAN信號收發不正確,嚴重時會導致不能正常發送報文,從而更容易導致CAN總線關閉。
例如,新能源汽車通常是指純電動汽車或者混合動力汽車,其特色是使用電池、電容來存儲能力,然后通過逆變的方式變成交流,帶動電動機驅動車輛。逆變產生的巨大電流形成強干擾,串擾到CAN總線上,導致控制器死機、損壞或者通訊中斷,車輛運行不穩定。
CAN總線Bus Off恢復的解決方案
如果出現了Bus Off,總線上的節點需要做一些動作,例如重啟CAN控制器或是重新上電,但是這些都只是一些補救措施,最根本的還是需要找到引起Bus Off的根源。
當發生CAN總線關閉時,我們可以檢查Bus Off寄存器的值,對CAN控制器的驅動及相關寄存器進行初始化操作。初始化完成后,CAN總線關閉故障就會立即解除。為了避免該節點在CAN網絡中頻繁發生總線關閉問題,建議在初始化后,不要立即對外發送CAN報文。
從下圖所示可以看出,當節點進入總線關閉狀態后,如果MCU僅是開啟自動恢復功能,CAN控制器在檢測到128次11個連續的隱性位后即可恢復通信,在實際的CAN通信總線中,這一條件是很容易達到的。我們已經知道,當進入總線關閉狀態時,節點已經發生了嚴重的錯誤,處于不可信狀態,如果迅速恢復參與總線通信,具有較高的風險,因此實際應用中,往往會通過MCU對CAN控制器總線關閉狀態的恢復過程進行編程處理,以控制節點從總線關閉狀態恢復到錯誤主動狀態的等待時間,如圖4所示,具體包括“快恢復”和“慢恢復”策略,兩種策略一般同時應用。
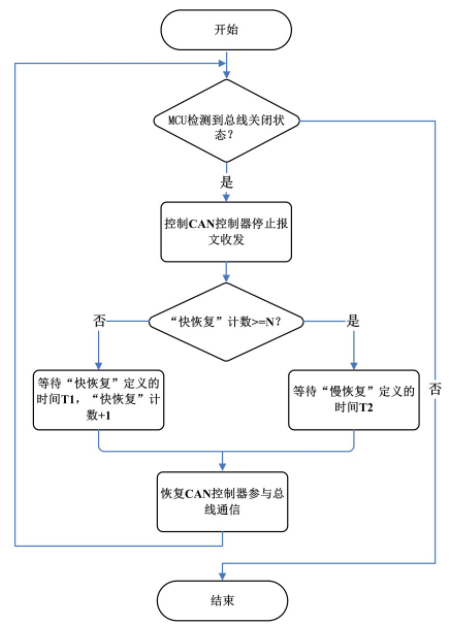
圖3
上文也提到過,由于汽車內部存在強干擾,也會導致CAN總線關閉。針對這種現象,我們通過以下方式進行處理:
由于汽車內部存在強電流產生的空間磁干擾,應該將CAN線纜雙絞程度加大;
CAN接口設計采用CTM1051隔離收發器、隔離限幅,防止ECU死機;
CAN接口增加磁環、共模電感等效果好的感性防護器件;
外接專用的信號保護器消除干擾,如ZF-12Y2;
使用網橋中繼設備CANBridge對部分強干擾源進行隔離。
綜合上述,汽車CAN總線關閉故障發生時,應分析物理層包括CAN線路、CAN控制器及收發器、CAN信號干擾等外在因素,同時分析CAN寄存器及軟件處理,重新初始化CAN驅動和恢復正常后,定時嘗試往外發送報文。
CAN/CANFD總線排查利器—CANFDDTU系列
新能源汽車在發送總線關閉情況時,我們也希望能夠有對應的CAN報文去分析,尤其是針對偶發性的故障時,我們更需要有可靠的CAN報文來作為判斷依據。
下圖為廣州致遠電子有限公司推出的CANFDDTU系列車載CAN(FD)-bus數據記錄儀,集成4路相互獨立且符合ISO11898標準的CAN-bus通道,支持4G實時通信,可以將CAN FD總線上的數據上傳到指定服務器;還支持北斗/GPS定位,實時記錄設備位置信息,同時支持車載以太網和LIN總線測試記錄,完善車載多總線測試體系,智能的網絡傳輸濾波器可有效減少網絡資源占用。標配存儲介質為32G高速SD卡(最高支持128G),可以長時間記錄CAN FD報文信息,被廣泛應用在高鐵列車、地鐵、風力發電機、自動駕駛車輛等故障檢測場合。
圖4 CANFDDTU-400EWGR示意圖
1、支持4G通信,數據上云
如圖5所示,CANFDDTU-400EWGR可以滿足各種應用場景需求,可針對不同場景的CAN FD總線、LIN總線和車載以太網數據進行同步監聽和實時采集,通過4G通信將數據實時上傳到指定云端服務器。
圖5CANFDDTU產品4G上傳數據
2、總線記錄回放,模擬現場數據
如圖6所示,CANFDDTU可以實時采集記錄總線數據,通過配置工具支持轉換成各種用戶常用的軟件格式,并通過設備將存儲的數據發送到用戶設備,準確模擬現場應用場景。
圖6CANFDDTU數據模擬示意圖
3、支持北斗/GPS定位可實時優化軌跡算法
如圖7所示,CANFDDTU-400EWGR帶有特色的北斗/GPS定位功能,可以實時記錄設備位置信息并上傳到指定服務器。方便用戶在需要設備數據時,快速定位設備,進行算法數據分析優化。
圖7 CANFDDTU產品GPS定位功能
4、一鍵觸發標記,快速定位故障
如圖8所示,CANFDDTU-400EWGR提供觸發按鍵Trigger,可實時標記CANFD報文數據,方便用戶輕松查找定位在SD卡中的記錄文件,進行故障快速定位。
圖8一鍵觸發標記功能
5、支持WiFi通訊,方便導出數據
如圖9所示,CANFDDTU-400EWGR支持WiFi通訊,通過WiFi可輕松實現數據的導出分析,助力用戶拓展使用場景。
圖9CANFDDTU產品WiFi傳輸功能
6、各通道電氣隔離,賦能分域記錄
如圖10所示,CANFDDTU-400EWGR可同時實現4通道CANFD報文記錄,針對每個汽車功能域實現單通道獨立運行,提高記錄的豐富性。
圖10CANFDDTU通道隔離
責任編輯:lq
-
新能源汽車
+關注
關注
141文章
10413瀏覽量
99261 -
CAN總線
+關注
關注
145文章
1936瀏覽量
130631 -
計數器
+關注
關注
32文章
2254瀏覽量
94358
原文標題:新能源汽車CAN總線Bus Off處理流程
文章出處:【微信號:ZLG_zhiyuan,微信公眾號:ZLG致遠電子】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
新能源汽車如何避免火災
淺析新能源汽車火災原因及對策
CAN總線關閉故障的解決方案
什么情況會造成can總線關閉
新能源汽車不安全?新能源汽車測試之方案篇——充電樁綜合測試

【換道賽車:新能源汽車的中國道路 | 閱讀體驗】 新能源到底新在何處?新能源在國內如何發展?
【換道賽車:新能源汽車的中國道路 | 閱讀體驗】2.(原創)防止黑客病毒入侵智能汽車遠程開車鎖車
【換道賽車:新能源汽車的中國道路 | 閱讀體驗】 A 序
【換道賽車:新能源汽車的中國道路 | 閱讀體驗】新能源汽車值得買嗎?未來又會如何發展
【換道賽車:新能源汽車的中國道路 | 閱讀體驗】1.汽車產業大變局
新能源汽車電池安全性檢測設備有哪些?





 工商網監
工商網監
評論