 利用神經網絡法實現對焦平面非均勻性校正進行改造設計
利用神經網絡法實現對焦平面非均勻性校正進行改造設計
紅外焦平面探測是一種兼具輻射敏感和信號處理功能的新一代紅外探測技術,但是由于制造過程和工作環境的影響, 使得焦平面陣列(FPA ) 各個陣列元即使在相同的輻射通量照射下,也會輸出不相同的響應電壓。這種紅外響應引起的遙感圖像的失真被稱作紅外圖像的非均勻性。為了提高觀測頻率、掃描范圍和空間分辨率,航天遙感一般采用推掃式的多元敏感線陣列對地物成像,通過觀察發現,推掃得到的遙感圖像出現有規律的條帶失真,條帶寬度與遙感器多元敏感元個數的掃描線寬度一致,而且隨著時間的推移,條帶現象日趨嚴重,與單敏感元掃描圖像中的噪聲相比有明顯差異,這種失真其實是焦平面非均勻性的一種表現形式。條帶失真是影響線陣列紅外遙感圖像質量的主要因素,必須要用諸如定標的方法去除,但是由于探測器單元響應會隨著時間和工作環境的變化改變,所以僅僅用定標的方法來校正條帶失真有很大的局限性。
圖1 BP網絡結構圖
本文對焦平面非均勻性校正的神經網絡法進行改進,介紹了一種基于人工神經網絡的遙感圖像條帶消除的方法。這種方法可以完全不對FPA進行標定(或自動標定),并且可以通過線性和非線性模型校正,是紅外成像系統非均勻性校正的理想方法。
傳統校正方法
線性校正假設探測器單元的響應呈線性:
y = ax + b
式中,x 為某一探測器單元的輸入信號,y 為可測的輸出信號。如果能求出增益因子a 和偏移因子b,就可求得無畸變的輸入信號x 。
傳統的非均勻性校正方法是在紅外焦平面成像系統使用前,用標準的兩個或多個參考溫度源,對每一個陣列單元響應進行定標,以保證每個陣列單元在兩個或多個參考溫度之間有相同的響應,其校正值被存儲起來,在進行數字處理時固定地將其疊加上去。如果每個陣列單元的輸出特性隨時間是完全線性和穩定的,那么,在上述定標溫度范圍內,這種校正是有效的,不過隨著陣列數的增加,存儲校正系數所需要的存儲容量就大為增加。再加上系統的不穩定性、陣列單元的非線性和1/ f 噪聲等因素的影響,使得經過一段時間后,陣列單元特性會發生漂移或溫度背景范圍出現變化,必須對紅外焦平面陣列進行再定標。顯然,這類校正方法不但麻煩,而且可能并不符合實際使用情況,從而導致校正效果不佳,因此,必須研究自適應的非均勻性校正方法。
神經網絡法
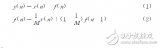
神經網絡法的主要特征是通過自學習模擬信息內部關系,進而獲得系統特征參數。假設輸入x和輸出y之間有一種復雜的關系f,神經網絡通過不斷調整結構的權重系數和閾值得到逼近的關系f眨?溝脃=f’(x); Rumelhart 和Mcclalland提出的多層前饋網絡的反向傳播算法(BP算法) ,由于解決了感知器不能解決的多層網絡學習算法的問題,可以很好地對復雜函數進行逼近,在工程中得到了廣泛的應用。一般使用的BP網絡是一個三層前向網絡,結構如圖1所示。
假定校正輸出為Y(n),輸入為X(n),則:
Y(n)=WT(n)X(n)+VT(n)
其中W和V是增益矢量和截距矢量,神經網絡法就是不斷依據實際景像調整W和V,來去除條帶失真。根據三層BP網絡結構,在中間層根據一定的法則計算某像素輸出,并以此作為該像素的輸出,反饋給線性校正神經元來調整W和V。調整以誤差信號均方值最小為準則。
對每一次迭代,令期望響應與輸出響應之差為誤差,用e(n)表示,則:
e(n)=f(n)-Y(n)=f(n)-WT(n)X(n)+VT(n)
其中,f(n)表示期望的校正后輸出,則誤差函數為:F(W,V)=(Wx+V-f)2,利用最陡下降法,可以得到計算W和V的迭代公式:
Wn+1=Wn-2ax(y-f)
Vn+1=Vn-2a(y-f)
式中:n為幀數,a為步長。
神經網絡算法的改進
從上面的分析可以得到,神經網絡法對非均勻性的校正的關鍵是如何建立期望的校正輸出模型,在非線陣列的焦平面非均勻性校正中,一般將校正元相鄰元的輸出平均值作為本元的期望輸出帶入網絡進行網絡訓練,發展出了4領域和8領域等方法。對于線陣列,由于探測單元只有兩個相鄰的探測元,直接應用上面的方法進行網絡訓練,校正效果不是太好。鑒于此,對算法進行如下改進。
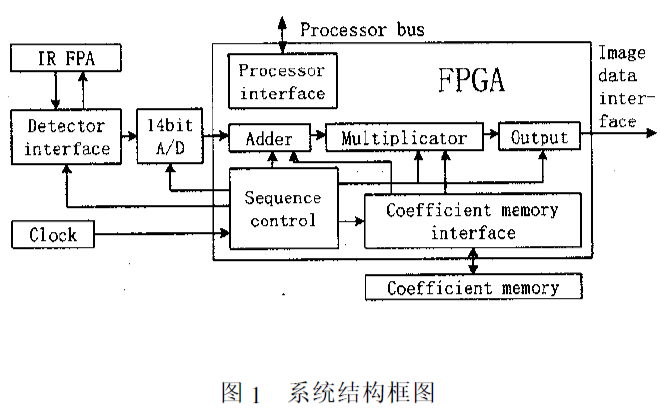
圖2 基于改進神經元算法的試驗結果
假設一幅圖像有n條掃描線組成,對于每一條掃描線響應,可以用Yk(i)表示,其中k表示第k條掃描線 ,i表示線陣列的第i個探測元。可以將線陣列擴展為有三條線陣列的焦平面,在第k次成像時,焦平面成像為[Yk-1(i):Yk(i):Yk+1(i)],這樣就可以假定Yk(i)的期望校正輸出為:
Y’k(i)=1/8(Yk(i-1)+Yk(i+1)+Yk-1(i-1)+Yk-1(i)+Yk-1(i+1)+Yk+1(i-1)+Yk+1(i)+Yk+1(i+1))
算法過程如下:
1.計算鄰域平均值:
Y’k(i)=1/8(Yk(i-1)+Yk(i+1)+Yk-1(i)+Yk+1(i)+Yk-1(i-1)+Yk+1(i+1)+Yk-1(i-1)+Yk+1(i+1))
2. 令y = Wx + V ,其中W為增益校正因子,V為偏移量校正因子。誤差函數:
F(W,V)=(Wx+V-f)2
利用此函數的梯度函數和最陡下降法,可以得到計算和的迭代公式:
Wn+1=Wn-2ax(y-f)
Vn+1=Vn-2a(y-f)
式中 n為幀數,a為步長。
3.利用線性校正算法得到:
Yn+1=Wn+1×Xn+a+Vn+1
實驗結果
應用上面的算法對遙感紅外圖像進行去條帶實驗。結果如圖2所示。其中a、c、e為原圖像,b、d、f為校正后對應圖像,可以看出,校正效果比較明顯。
結語
紅外成像技術正在突飛猛進地發展,紅外探測器是核心部件,非均勻性問題嚴重影響它的性能。因此,解決條帶問題是線陣列探測器發展的關鍵,雖然神經網絡法可以進行去條帶處理,但是離實用還有一段距離,尤其神經網絡訓練的速度遠遠達不到實時應用的要求。本文通過對神經元算法進行改進得到了一種高效、高速、高精度的去條帶方法。
責任編輯:gt
-
探測器
+關注
關注
14文章
2619瀏覽量
72919 -
神經網絡
+關注
關注
42文章
4765瀏覽量
100559 -
遙感器
+關注
關注
0文章
8瀏覽量
1513
發布評論請先 登錄
相關推薦
labview BP神經網絡的實現
非局部神經網絡,打造未來神經網絡基本組件
【PYNQ-Z2試用體驗】神經網絡基礎知識
人工神經網絡實現方法有哪些?
如何設計BP神經網絡圖像壓縮算法?
基于BP神經網絡的PID控制
焦平面紅外圖像的非均勻性校正技術
使用FPGA實現紅外焦平面器件的非均勻性校正的詳細資料說明
基于曲面擬合的低頻非均勻性噪聲校正算法






 工商網監
工商網監
評論