 基于樹莓派的自動回收瓶子的智能機器人設計方案
基于樹莓派的自動回收瓶子的智能機器人設計方案
我們使用了帶有Arduino(克隆)的Raspberry Pi來控制移動平臺。瓶子識別軟件基于基于Haar功能的級聯分類器,用于通過OpenCV進行對象檢測。Raspberry Pi上的代碼是用Python編寫的,它提供了比C / C ++更快的開發時間,但是開銷更大。事實證明,這很有用,因為該機器人在很短的時間內就贏得了比賽。該文檔非常廣泛,因為它是必需的,并且從初始構想到最終零件以及仿真文件的每個細節都可用。
機器人會避開障礙物,直到攝像機看到并識別出瓶子,一旦在Raspberry Pi上運行Python腳本檢測到瓶子,其位置就會轉發到Arduino板上,后者在狀態機中托管主程序,并傳遞至下一個狀態:抓瓶子。抓住瓶子后,歸位系統非常簡單:它使用指南針沿著回收區域的方向(地圖的拐角)移動,一旦檢測到墻壁(而不是障礙物),它就會跟隨它直到到達拐角處。釋放瓶子。重復。

最初的計劃是使用2個紅外傳感器和攝像頭進行障礙檢測,但是攝像頭速度太慢,最終模擬結果表明,更多的紅外傳感器將是一個更簡單的解決方案,并且同樣有效,因此我們決定使用4個紅外傳感器并且僅將相機用于瓶子檢測。指南針傳感器在攝像機后面的原始位置遇到了很多麻煩,事實證明建筑結構地板上的金屬條正在影響指南針值,并將其更高地安裝在解決此問題的桅桿上。
責任編輯:xj
文章出處:【微信公眾號:電路設計技能】歡迎添加關注!文章轉載請注明出處。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
210文章
28224瀏覽量
206594 -
電路設計
+關注
關注
6666文章
2430瀏覽量
203385 -
智能
+關注
關注
8文章
1704瀏覽量
117426 -
樹莓派
+關注
關注
116文章
1699瀏覽量
105534
原文標題:基于樹莓派的自動回收瓶子的智能機器人
文章出處:【微信號:cirmall,微信公眾號:電路設計技能】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
樹莓派開發的最佳編程語言選擇
樹莓派(Raspberry Pi)是一款由英國樹莓派基金會開發的信用卡大小的單板計算機,它以其低成本、易于編程和靈活性而受到廣泛歡迎。樹莓
ARM開發板與樹莓派的比較
處理器 ARM開發板通常采用不同的ARM處理器,如Cortex-A系列、Cortex-M系列等,而樹莓派則主要使用博通的ARM處理器。樹莓派的處理器性能相對較高,尤其是在最新的
樹莓派gpio有什么用,樹莓派gpio接口及編程方法
一、樹莓派GPIO的用途 樹莓派(Raspberry Pi)是一款小巧、功能強大的單板計算機,廣泛應用于編程教育、物聯網項目、家庭媒體中心等領域。GPIO(General Purpos
什么是樹莓派?樹莓派是什么架構的
什么是樹莓派 樹莓派(Raspberry Pi,簡寫為RPi,別名為RasPi/RPI)是由英國“Raspberry Pi 慈善基金會”開發的一款為學習計算機編程教育而設計的微型電腦。
樹莓派的功能用途是什么
、科研、工業控制、物聯網、多媒體播放、家庭自動化等領域。 樹莓派(Raspberry Pi)是一種小型、低成本的單板計算機,由英國的Raspberry Pi基金會開發,其功能和用途非常廣泛。以下是
樹莓派裝ubuntu和raspbian哪個更好
樹莓派(Raspberry Pi)是一款由英國樹莓派基金會開發的單板計算機,廣泛應用于教育、科研、物聯網等領域。樹莓
linux開發板與樹莓派的區別
定義和用途 Linux開發板:Linux開發板是一種基于Linux操作系統的嵌入式開發板,通常用于工業自動化、物聯網、智能家居等領域。 樹莓派:樹莓
Hailo聯手樹莓派,開創人工智能新紀元
近日,人工智能處理器領導品牌Hailo正式宣布與樹莓派展開深度合作。Hailo將為樹莓派推出專用AI套件,支持
樹莓派攜手Hailo為其新品注入人工智能功能
套件用于支持樹莓派5的AI功能。此次合作將以先進的人工智能功能助力專業以及創作愛好者在智能家居、安全、機器人等領域中提升解決
【開源作品】基于樹莓派4B、ESP32制作的桌面機器人、氣象站、立方光!
;gt;>點此查看全文
基于樹莓派 4B DIY 能笑會動的桌面機器人
Emo是一款基于樹莓派4做的個人伴侶
發表于 03-05 16:52
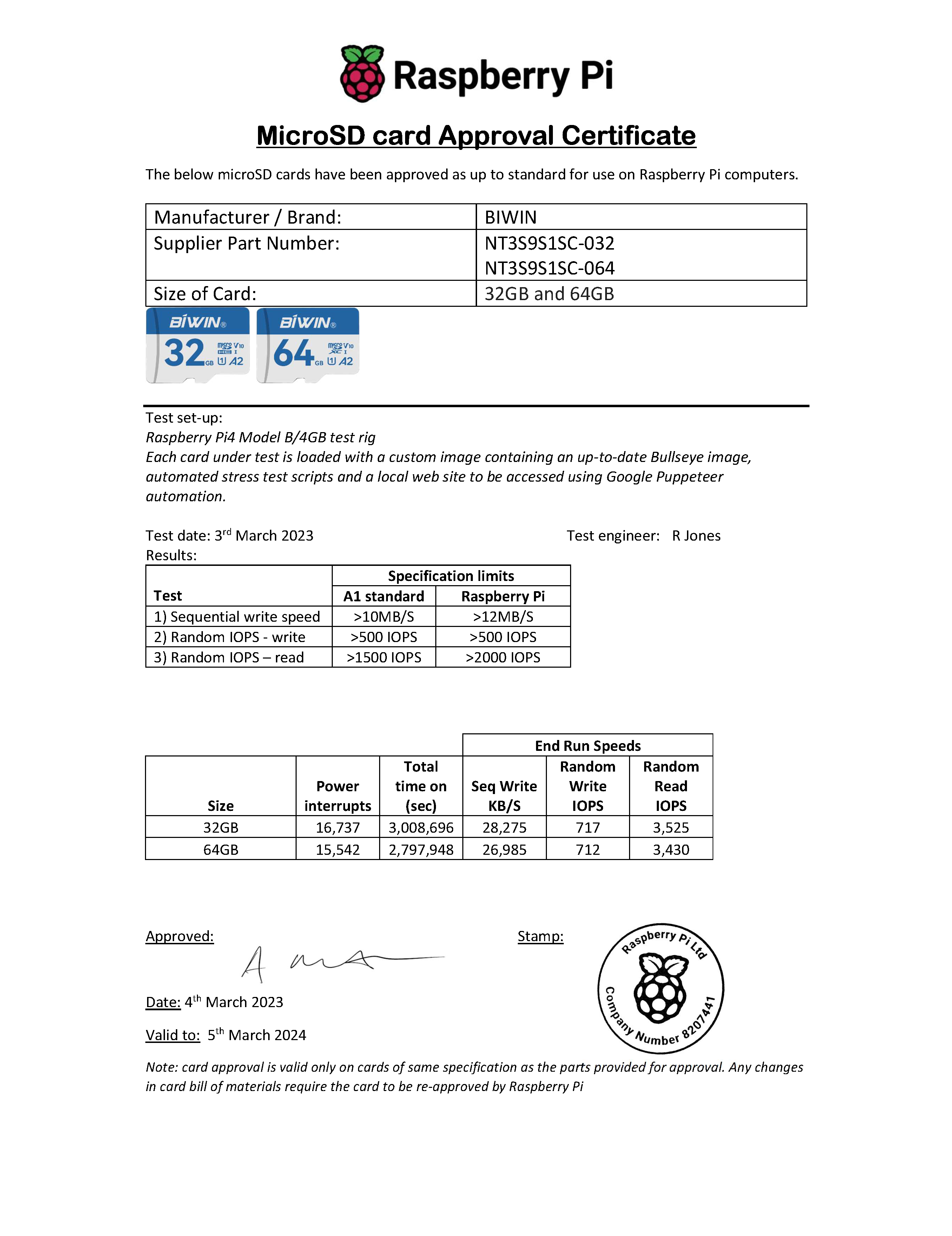
佰維存儲microSD卡通過樹莓派AVL認證
樹莓派為英國樹莓派基金會開發的微型單板計算機,其以小尺寸、高性能、低成本和易開發等特點,廣泛應用于物聯網、工業自動化、智慧農業、人工
基于樹莓派的四足噴水機器人設計
今天小編給大家帶來的是來自B-AROL-O團隊帶來的基于樹莓派的四足噴水機器人,該機器人可以在農場環境中自主導航,識別需要澆水的植物并自動澆

基于樹莓派RP2040單片機設計的三階魔方還原機器人
這是一款基于樹莓派RP2040單片機設計的三階魔方還原機器人,控制和魔方求解都使用單片機完成。對于隨機打亂的三階魔方,平均還原步驟數在21步左右。
【開源項目】Emo:基于樹莓派 4B DIY 能笑會動的桌面機器人
Emo是一款基于樹莓派4做的個人伴侶機器人,集時尚與創新于一身。它不僅僅是一款機器人,更是一個活生生的存在,與其他機器人不同,它擁有獨特的
發表于 12-26 15:18





 工商網監
工商網監
評論