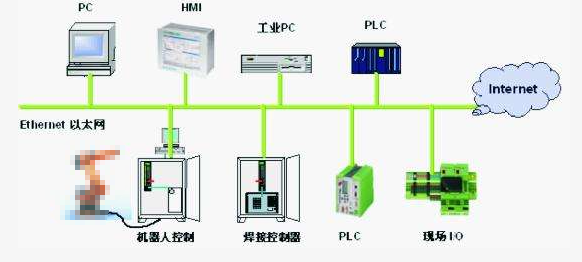
 借助工業以太網進行電源管理
借助工業以太網進行電源管理
借助工業以太網進行電源管理,通過 PROFINET 進行電源管理

借助CapCtrl.xml 進行的工業以太網接口配置不是PROFIenergy的函數并且必須分開考慮。必須始終只配置PROFIenergy 或CapCtrl.xml。如果同時配置這兩項,將導致異常效果和故障!
以下信號可供用于激活或停用各種節能模式以及識別機器人控制系統的狀態。
這些功能只能在 EXT 運行模式下執行,而不能在 T1 或 T2 下執行。
無法將 PROFIenergy 與電源管理組合。
電源管理指的不是 PROFIenergy。
輸入字節 0
| 0 | AB |
驅動總線 0 = 接通驅動總線,條件:HIB = 0 和 KS = 0 1 = 關斷驅動總線,條件:HIB = 0 和 KS = 0 |
| 1 | HIB |
休眠 0 = 無功能 1 = 使控制器休眠,條件:AB = 0 和 KS = 0 |
| 2 | KS |
冷啟動 0 = 無功能 1 = 使控制器冷啟動,條件:AB = 0 和 HIB = 0 |
輸出字節 0
| 0 | AB |
驅動總線 0 = 驅動總線已接通 1 = 驅動總線已關斷 |
| 1 | BBS |
機器人控制系統的待機運行狀態 0 = 機器人控制系統尚未做好運行準備 1 = 機器人控制系統已經準備就緒 |
借助 CabCtrl.xml 進行電源管理.
一個上一級的 PLC 可通過工業以太網開、關 KR C4 的驅動總線或冷啟動或以休眠方式啟動控制器。對于通過CabCtrl.xml 進行的電源管理,為控制功能提供一個輸入位,為反饋給上級 PLC 提供一個輸出位。
須通過非安全區域 (02xxxx) 中的工業以太網電報共同傳輸這兩個位。
通過CabCtr.xml 確定向量地址 (位偏移量)。在此必須注意,已計劃預留的范圍不能用于其它方面。
PROFIsafe 協議結構:

1.在PLC 項目中,最多有2032 個安全輸入 / 輸出端可供使用
2.PROFIsafe 是標準PROFINET 電報中的組成部分。
3.電報結構
a. 第 0 至 15 字節為安全輸入
b. 第 16 至 269 字節為標準輸入
c. 第 270 至 285 字節為 安全輸出
d. 自第 286 字節起為標準輸出
4.針對通過工業以太網進行的電源管理,規定的輸入字節和輸出字節通過正常的輸入 / 輸出范圍傳輸.
操作步驟:
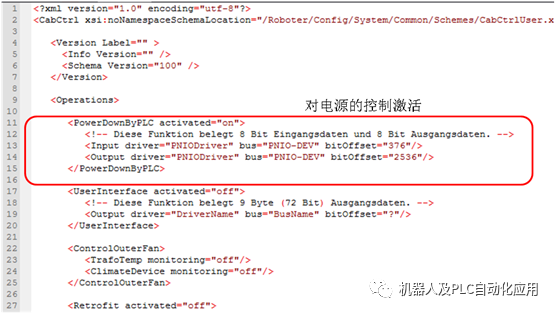
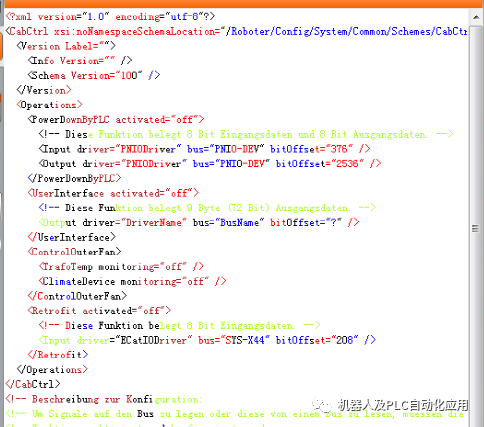
1. 通過 Windows 平臺打開以下文件:
C:KRCRoboterConfigSystemCommonCapCtrl.xml
2. 調整
“On”激活電源管理
3.
(輸入驅動程序 =“PNIODriver” 總線 =“PNIO-DEV” bitOffset=“376”)
(輸出驅動程序 =“PNIODriver” 總線 =“PNIO-DEV” bitOffset=“2536”)
? 如圖所示,接受PNIODriver和PNIO-DEV 的值
4. 計算 bitOffset (示例)
位偏移量必須始終是八的倍數。
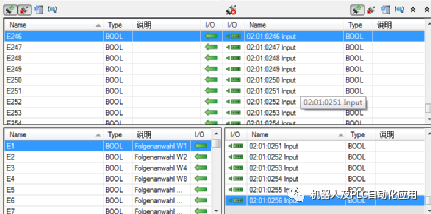
5. 在 KR C4 控制器上,應使用 02248 至 02256 的輸入端
a. 02248 與字節偏移量 31相符。
b. 前面的 16 字節安全輸入端 必須一起考慮進去
c. 也就是, 16 字節 + 31 字節 = 47 字節
d. 47 字節 與376 位相當
e. 在 位偏移量時,輸入該值
6. 在 KR C4 控制器上,應使用 02248 至 02256 的輸出端
7. 02248 與字節偏移量 31 相符
8. 286 個字節已由安全輸入端、標準輸入端和安全輸出端占用
9. 也就是, 286 字節 + 31 字節 = 317 字節
10. 317 Byte 相應于 2536 Bit (位) 。
11. 在 位偏移量時,輸入該值
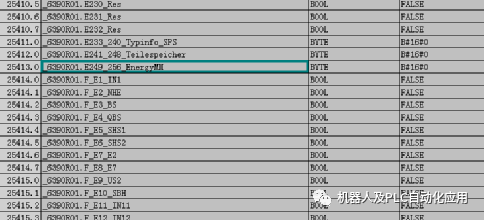
E249-E256ENERGYMM是機器人電源控制
責任編輯:lq
-
機器人
+關注
關注
210文章
28224瀏覽量
206588 -
電源管理
+關注
關注
115文章
6155瀏覽量
144247 -
工業以太網
+關注
關注
10文章
614瀏覽量
42315
原文標題:KUKA C4機器人的PN電源管理
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦

工業以太網安全性分析及防護措施
解讀工業以太網標準:Profinet與EtherNet/IP
什么是工業以太網?有何特點?
工業以太網和普通以太網區別在哪
Profinet與以太網的區別
工業以太網的主要協議及其特點
工業以太網的基本原理及優勢
工業以太網的基本原理及優勢
基于工業以太網的電能計量管理系統的應用

淺談基于工業以太網的電能計量管理系統的應用





 工商網監
工商網監
評論