 PLC安全門兩區域間光電-故障控制改進
PLC安全門兩區域間光電-故障控制改進
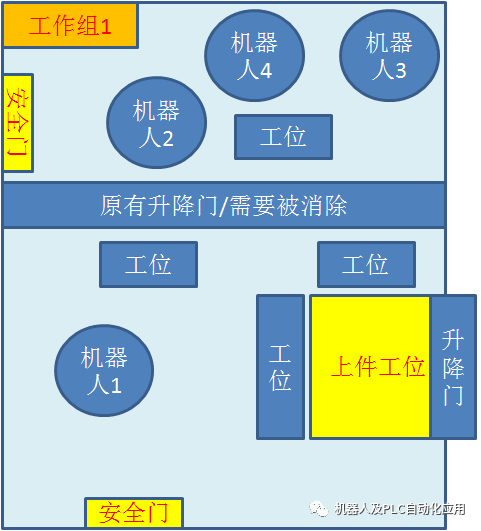
原始程序布局狀態
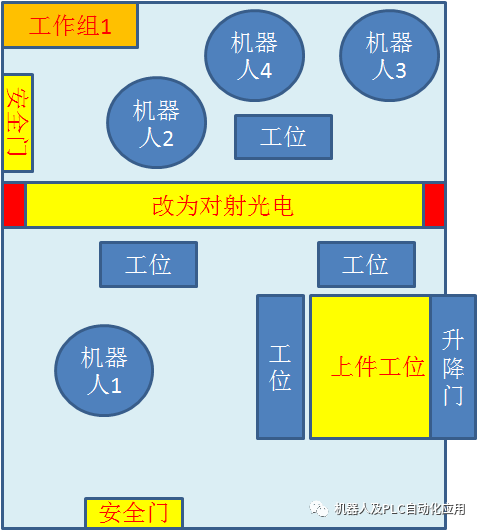
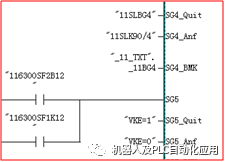
改進后的布局狀態:
1.將機器人E14機器人安全加入光電及升降門信號.
2.機器人安全門回路加入光電和升降門信號.
3.誤闖光電會引起工作組1報安全門故障.
1.將機器人E14機器人安全加入光電及升降門信號.
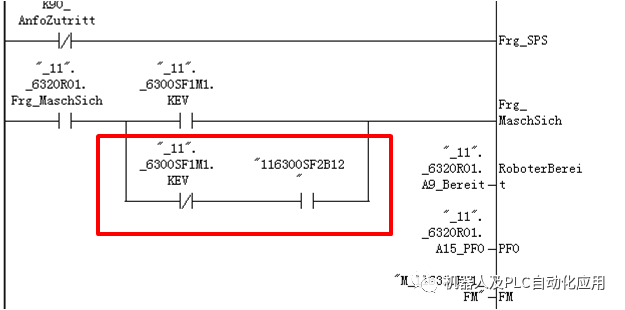
編程速度快,改動最小,影響范圍小,安全系數低.
2.機器人安全門回路加入光電和升降門信號.
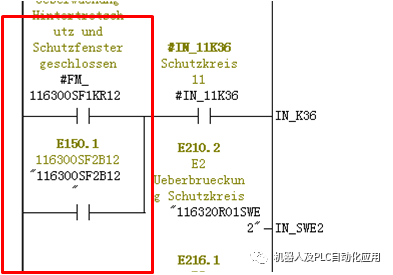
打開升降門后,如果擋光電會引起機器人2號的安全門回路斷開,使機器人以安全停止1的方式停止.
相對1的解決方案,這個方案的安全系數更高,完全控制了2 號機器人,但當人員跨過新加光柵后,3號/4號機器人仍然在運動,還是有一定的安全風險.
3.誤闖光電會引起工作組1報安全門故障.
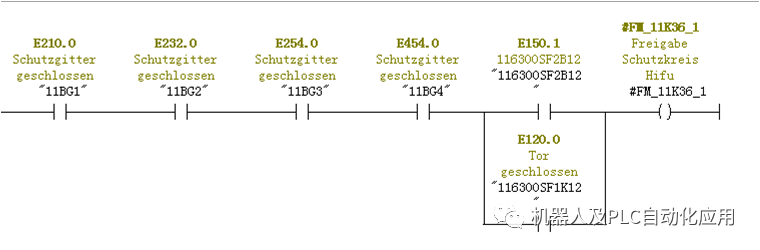
并入安全門控制回路,如果開著升降門直接闖過光柵,將使整個工作組1停止產生安全門開故障.
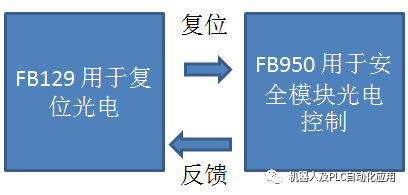
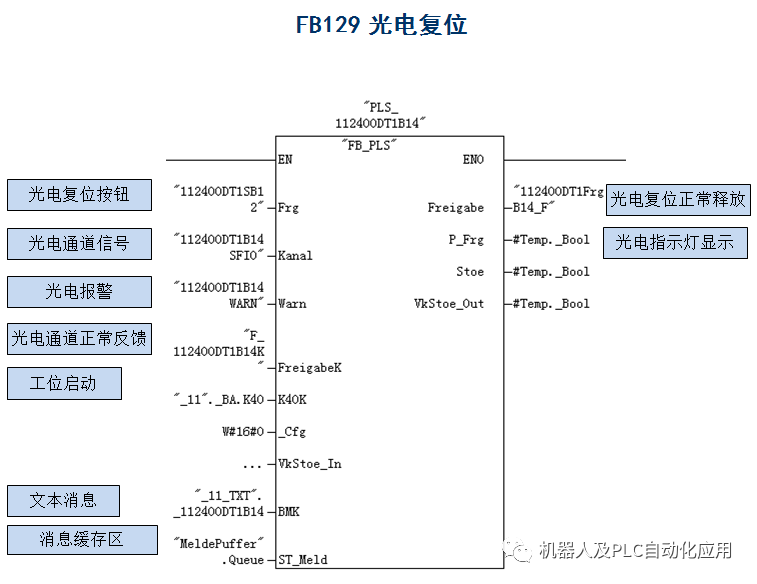
光電復位示意圖:
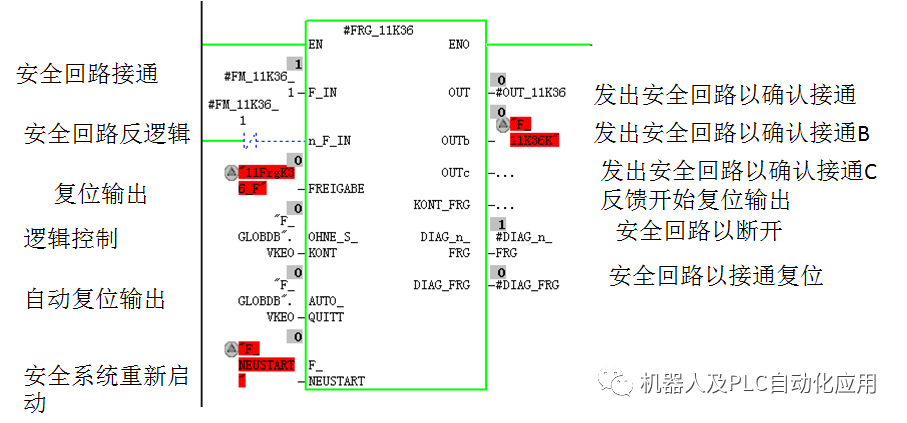
FB950接口設置
責任編輯:lq
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
210文章
28212瀏覽量
206550 -
光電
+關注
關注
8文章
733瀏覽量
81620 -
plc
+關注
關注
5008文章
13164瀏覽量
462099
原文標題:PLC安全門兩區域間光電-故障控制改進
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
LT1-B18-C反射板光電開關控制門的原理是什么
反射板光電開關控制門的原理是基于光電傳感技術的,通過檢測紅外線光束的遮光或反射來觸發開關動作。在門禁系統中,這種開關具有廣泛的應用前景。
倉門限位開關INCHI-CMS/D1B 防碰撞安全門裝置器技術參數
倉門限位開關及防碰撞安全門裝置器。在選擇和使用這些設備時,建議查閱具體產品的技術手冊或咨詢供應商以獲取準確的技術參數和性能信息。
PDF-300AK永磁式安全門保護裝置的構成及產品介紹
永磁式安全門保護裝置是一種高效、安全、可靠的安全防護設備,其獨特的磁感應原理和穩定的性能使得它在各個領域都有廣泛的應用前景。
plc故障排查方法及技巧
在工業自動化領域,PLC(可編程邏輯控制器)扮演著樞紐角色,監控并調控生產流程的每個環節。然而,和所有高精密設備一樣,PLC也難免出現故障,這些故障
什么是PLC的故障診斷功能?
PLC的故障診斷功能是指PLC系統能夠自動檢測、識別和報告設備或系統中潛在或已經發生的故障,從而幫助用戶及時采取相應措施進行修復,確保生產過程的穩定和

誰在引領智能門“3.0時代”?王力機器人安全門交出答卷
的廣泛應用,智能門細分市場也走到了“3.0時代”。以王力機器人安全門為代表的產品呈現出更高端、智能便捷的創新心態,國產智能門鎖品牌釋放出豐厚技術實力,讓國人有了實現更多智能生活幸福的可能。 歷經技術蛻變,王力開啟智能門3.0新時
冬至后智能門“罷工”?王力機器人安全門智慧便捷強運行
體驗并不理想。如何在嚴冬環境里避免智能門“罷工”?王力機器人安全門通過技術融合應用,實現了智能門精準自動服務,在寒冬里帶給人們超級舒心、便捷的進出入新感受。 天冷凍手難操控,王力機器人安全門
新房裝修要不要換入戶門?王力機器人安全門帶來更換新方案
體驗差等問題。隨著人們對隱私、居住質量的要求提高,更換入戶門日益成為了裝修的“必選項”。以王力機器人安全門來看,通過智能科技的巧妙運用,不僅帶給用戶舒適便捷的功能價值,還結合更多科技操作設計以及服務,賦予用戶更多精神享受,為
智能門教科書選擇 王力機器人安全門與常見智能門對比
智能門可謂是當前智能家居類產品里的市場新寵,乘著AI智能化發展的東風,不斷的萬千消費者的視線,刷新市場對智能門的認知。今天,我們就選擇當前市場常見智能門功能與前沿智能門王力機器人智能
PLC出現哪些問題必須要第一時間找廠家?
有幾種PLC問題是必須第一時間找廠家解決的,包括: (1)硬件故障:如果PLC設備出現嚴重的硬件故障,例如電源





 工商網監
工商網監
評論