 BLDC電機控制要求
BLDC電機控制要求
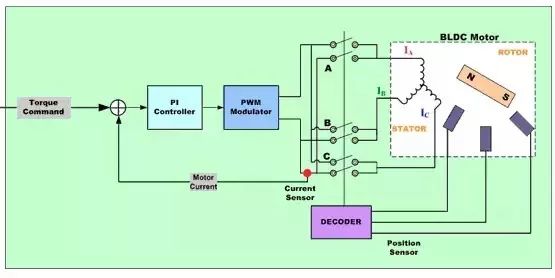
無刷電機屬于自換流型(自我方向轉換),因此控制起來更加復雜。BLDC電機控制要求了解電機進行整流轉向的轉子位置和機制。對于閉環速度控制,有兩個附加要求,即對于轉子速度/或電機電流以及PWM信號進行測量,以控制電機速度功率。
BLDC電機可以根據應用要求采用邊排列或中心排列PWM信號。大多數應用僅要求速度變化操作,將采用6個獨立的邊排列PWM信號。這就提供了最高的分辨率。如果應用要求服務器定位、能耗制動或動力倒轉,推薦使用補充的中心排列PWM信號。
許多不同的控制算法都被用以提供對于BLDC電機的控制。典型地,將功率晶體管用作線性穩壓器來控制電機電壓。當驅動高功率電機時,這種方法并不實用。高功率電機必須采用PWM控制,并要求一個微控制器來提供起動和控制功能。
控制算法必須提供下列三項功能:
?用于控制電機速度的PWM電壓
?用于對電機進整流換向的機制
?利用反電動勢或霍爾傳感器來預測轉子位置的方法
脈沖寬度調制僅用于將可變電壓應用到電機繞組。有效電壓與PWM占空度成正比。當得到適當的整流換向時,BLDC的扭矩速度特性與以下直流電機相同。可以用可變電壓來控制電機的速度和可變轉矩。
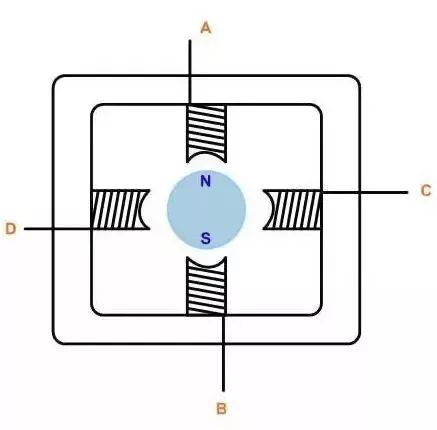
功率晶體管的換向實現了定子中的適當繞組,可根據轉子位置生成最佳的轉矩。在一個BLDC電機中,MCU必須知道轉子的位置并能夠在恰當的時間進行整流換向。
審核編輯:何安
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
電機
+關注
關注
142文章
8930瀏覽量
145089
發布評論請先 登錄
相關推薦
FOC電機與BLDC電機的比較
FOC電機與BLDC電機在電動車及其他應用領域中都扮演著重要角色,但它們在控制方式和性能特點上存在一些差異。以下是對FOC電機與

BLDC電機控制算法詳解
無刷直流電機(Brushless DC Motor,簡稱BLDC電機)以其高效率、高可靠性和低噪音等特點,在工業、家電和汽車等領域得到了廣泛應用。為了實現BLDC
BLDC電機與變頻器的區別
在電機技術不斷發展的今天,BLDC電機(Brushless Direct Current Motor,無刷直流電機)以其高效、低噪音、長壽命等特點,在多個領域得到了廣泛應用。而變頻器作
BLDC電機的工作原理與結構
隨著現代工業自動化程度的不斷提高,電機作為重要的動力設備,其性能與效率的要求也日益增加。在眾多種類的電機中,無刷直流電機(Brushless DC Motor,簡稱
bldc電機工作原理 bldc電機和普通電機區別
的工作原理,以及它與普通電機的區別。 一、BLDC電機的工作原理 結構組成 BLDC電機主要由定子、轉子、位置傳感器和電子
bldc變頻電機是皮帶嗎 bldc電機是皮帶還是直驅
BLDC(無刷直流)電機是一種電動機,它使用電子換向器來控制電動機的磁場,而不是傳統的碳刷和換向器。這種設計使得BLDC電機具有更高的效率、
bldc變頻電機和直驅變頻電機區別
特點、應用領域以及它們之間的區別。 一、BLDC變頻電機 1. 工作原理 BLDC變頻電機采用無刷直流電機(Brushless DC Mot
bldc變頻電機和直驅變頻電機區別
變頻電機和直驅變頻電機的工作原理、結構特點、應用領域以及它們之間的區別。 一、BLDC變頻電機 1. 工作原理 BLDC變頻





 工商網監
工商網監
評論