 一種由TL494為控制核心的脈寬調制技術
一種由TL494為控制核心的脈寬調制技術
隨著電力電子技術的發展,脈寬調制(Pulse Width Modulation,PWM)技術的應用日益引起人們的重視。本文介紹了一種由TL494為控制核心的脈寬調制技術,并將其應用于直流電動機控制系統。分析了該系統的工作原理、實現電路以及PWM控制芯片的結構和具體應用。
1.控制系統的工作原理與實現
1.1系統工作原理
本控制系統的基本設計思路是采用降壓斬波電路如圖1。
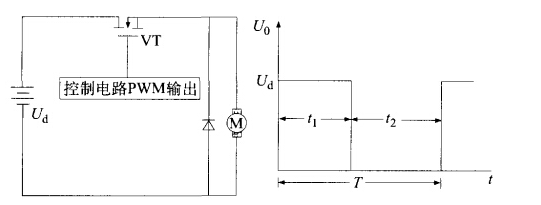
圖1 降壓斬波電路及其波形
直流電源Ud,負載為電動機(M),當開關器件(VT)被觸發導通時,直流電壓就加到電動機上,并持續t1時間。當場開關器件關斷時,負載上的電壓為零,并持續t2時間。若定義工作周期T=t1+t2,占空比k=t/T,則由波形圖,并根據直流斬波電路的原理有:
系統輸出電壓平均值Uo為:

其輸出電壓的有效值(U)為:
.jpg)
本系統所采用脈寬調制(PWM)工作方式,維持T不變,改變t1。
控制系統的原理框圖如圖2。
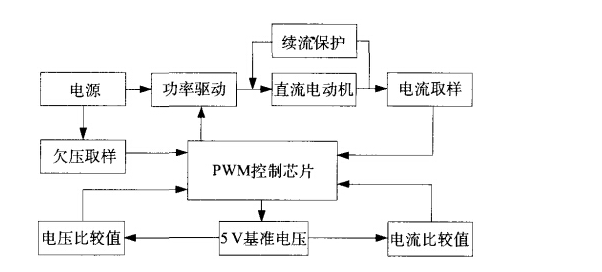
圖2 控制系統原理框圖
該系統中電源通過功率驅動電路使電動機工作,而功率驅動電路的通斷由PWM控制芯片控制;系統對電動機電流進行取樣,反饋到PWM控制芯片,與電流比較電路的電流值比較,以控制PWM信號輸出,達到調速的目的。系統同時還對電源電壓取樣,反饋到PWM控制芯片,與電壓比較電路的電壓值比較,以控制PWM信號輸出,達到欠壓保護的作用。
功率驅動電路采用常見的BUCK電路,開關管選用Power MOSFET。其輸出電壓的調節通過控制器件的開通時問來實現,考慮電動機的電感影響,輸出電流比較穩定,能耗也較低。
1.2PWM控制芯片的選用
在實現電動機PWM控制系統的控制電路中,本系統選用TL494芯片。TL494芯片具有抗干擾能力強、結構簡單、可靠性高以及價格便宜等特點。
TL494的內部電路(如圖3)由基準電壓產生電路、振蕩電路、間歇期調整電路、兩個誤差放大器、脈寬調制比較器以及輸出電路等組成。
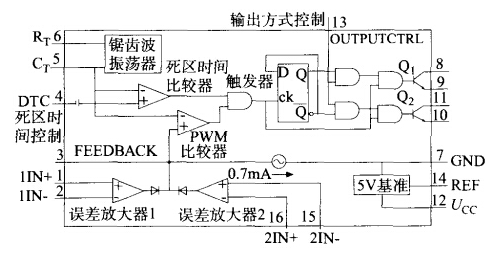
圖3 TL494內部結構圖
其中1、2腳是誤差放大器1的同相和反相輸入端;3腳是相位校正和增益控制;4腳為間歇期調理,其上加0~3.3V電壓時可使截止時間從2%變化到100%。5、6腳分別用于外接振蕩電阻RT和振蕩電容CT,以確定振蕩器產生鋸齒波的頻率fosc;

式中,RT和CT的取值范圍:RT=5~100kQ,CT=0.001~0.1μF。7腳為接地端;8、9腳和11、10腳分別為TL494內部兩個末級輸出三極管集電極和發射極;12腳為電源供電端;13腳為輸出控制端,該腳接地時為并聯單端輸出方式,接14腳時為推挽輸出方式;14腳為5V基準電壓輸出端,最大輸出電流10mA;15、16腳是誤差放大器2的反相和同相輸入端。
1.3系統的實現電路
該控制系統的具體實現電路如圖4。系統采用電流負反饋的方式跟蹤電動機的轉速,同時通過對電源的電壓負反饋,使系統具有欠壓保護功能。
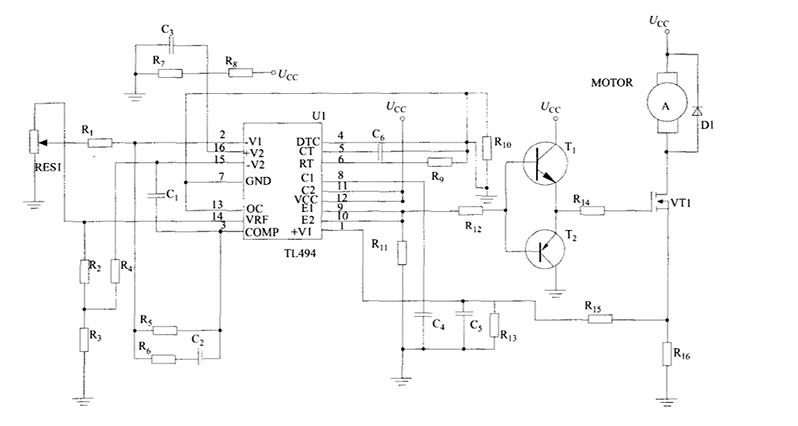
圖4 系統的實現電路
檢測電動機電流,并反饋到TL494內部誤差放大器1的1腳,與2腳的電流基準信號比較,控制TL494的PWM輸出,實現對電動機調速的功能。通過調節可調電阻(RES1)的電阻值,即改變設定的電流基準信號的大小,來調節PWM輸出信號的占空比,達到調節電動機轉速的目的。
通過對電源進行電壓取樣,并反饋到TI494的內部誤差放大器2的15腳,與16腳的電壓基準信號比較,控制TL494的PWM輸出,實現系統的欠壓保護功能。
系統功率驅動選用Power MOSFET,其輸入阻抗很高,可直接由晶體三極管驅動。TI494的13腳用來控制輸出模式。在該系統中,選擇將該端輸入為低電平,這時TL494內觸發器Q1和Q2不起作用,兩路輸出相同,其頻率和振蕩器頻率相同、最大占空比為98%。
2.仿真結果
為驗證系統的有效性,可以通過計算機對上述基于PWM技術的直流電動機控制系統的電路進行系統仿真。設定該系統的電源電壓Ucc=12V,直流電動機額定參數:Un=12V,In=15A,4極,電樞電阻Ra=0.21Q,轉動慣量J=0.57kg㎡,通過改變控制電路的可調電阻RES1來實現系統輸出的不同占空比,當輸出占空比分別為0.2、0.65/0.8電動機的電壓和電流波形如圖5所示。
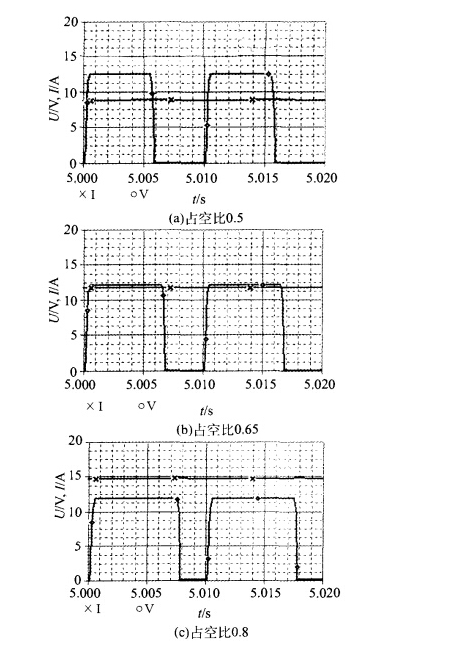
圖5 電動機電壓與電流波形圖
由圖5可以看出在輸出不同的占空比時,電動機的電壓和電流的波形穩定,這有利于電動機長期穩定運行。這說明本文所介紹的基于TL494的PWM控制技術在實際應用中是可行的,而且運行穩定。
結論
本文總結了一種基于TL494芯片的PWM控制技術,通過仿真結果表明該系統結構簡單、能耗低、工作穩定,而且充分利用TL494芯片的特點,使系統具有欠壓保護的優點。
責任編輯人:CC
-
TL494
+關注
關注
37文章
180瀏覽量
55815 -
脈寬調制
+關注
關注
3文章
215瀏覽量
38282
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論