 基于ARM7內核LPC2119芯片實現雙向DC/DC變換器的設計
基于ARM7內核LPC2119芯片實現雙向DC/DC變換器的設計
作者:吳峂,金新民,童亦斌
為了實現直流能量的雙向傳輸,雙向DC/DC變換器被廣泛應用于UPS系統、航天電源系統、電動汽車驅動及蓄電池充放電維護等場合。
在這些應用當中,很多時候都要求開關電源不僅能夠控制能量的雙向流動,還要能夠實現低壓、大電流的輸出。在開關頻率不太高的情況下,隨著輸出電壓的降低、輸出電流的增加,整流損耗就成了影響開關電源效率的主要岡素。因此,為了提高開關電源的效率,就必須設法降低整流損耗。而在本文中采用的同步整流技術就是一種降低整流損耗的有效手段。
在以往的電源設計當中,模擬控制技術因其動態響應快、無量化誤差、價格低廉等優點而被廣泛應崩;而數字控制技術則由于其成本和技術等方面的因素而較少得到應用。近年來,隨著半導體技術的不斷發展,數字微控制器的成本顯著降低,性能不斷提高,這就使得高頻開關電源的全數字化成為可能。由于數字控制具有能夠簡化系統硬件沒計、減少分立元件的數量、改善系統可靠性等諸多優點,因此它必將在今后的開關電源設計中得到越來越廣泛的應用。
1 系統介紹
1.1 系統基本說明
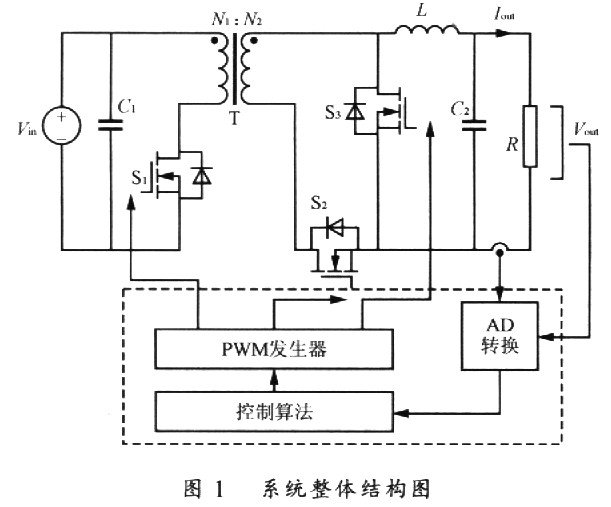
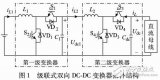
系統的整體構成如圖1所示。圖1中虛線內為系統的控制部分。其余為主電路部分。主電路的工作原理將在后面詳細分析。
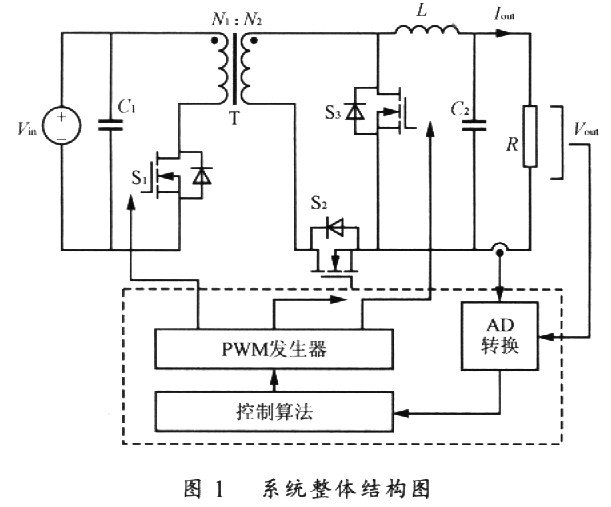
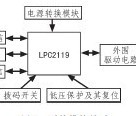
在系統的控制電路中,其核心處理器是PHILIPS(飛利浦)公司出品的基于ARM7內核的LPC2119微控制器。LPC2119具有高性能、低成本、低功耗等諸多優點,很適合應用于對成本和性能都有嚴格要求的工業控制領域。負責A/D轉換的是24位高精度的A/D轉換器CS5460A,它同樣具有低成本、高性能的特點,以往在各類產品中有著廣泛的應用。
控制電路工作時,CS5460A在獲得系統輸出電壓、電流量的模擬信號后,將它們轉變為數字量,并通過專用總線傳給LPC2119。LPC2119得到這些信息以后先對其進行數字濾波等軟件處理,然后再將其作為反饋量,用于控制算法的運算,得到控制量及其相應的驅動信號.最終控制主電路開關管的動作。
1.2 雙向DC/DC全數字控制的軟件實現
如前所述,出于簡化控制電路結構、增加系統可靠性等方面的考慮,系統采用以ARM芯片LPC2119為控制系統核心的全數字化設計。要實現我們期望的控制功能,除了在上面介紹的基本控制電路外,完善、可靠的控制軟件和恰當的控制策略也都是不可或缺的。
在控制軟件方面,筆者本著層次分明、時序分級、全局考慮、書寫規范的設計總則進行了系統控制軟件的開發。根據電力電子軟件的實際需要,程序整體上分為3個層次,分別是主控層、算法層和接口層。其中接口層為底層,主控層為頂層,算法層起到連接主控層和接口層的中間橋梁作用。具體來說,主控層不涉及具體的操作,只負責各個任務的調度,中斷的安排,時間和優先級的處理等。主控層有一個文件,包括main函數和中斷函數。在main函數和中斷函數中調用算法層的函數來實現系統的功能。而算法層則負責具體任務的執行,控制算法的實現,系統的主要功能全都在算法層中體現。接口層負責與硬件的接口,所有跟外設有關的操作都在該層進行處理。
在控制策略方面,本文選擇了增量式數字PI算法。增量式PI算法的主要優點為
(1)增量式算法不用做累加,控制量的確定僅與最近幾次誤差采樣值有關,即其誤差不累積。
(2)其每次輸出的是控制量的增量,誤動作影響小。
在PI算法中,比例部分能夠改善系統的動態性能,而積分部分則能夠減小系統的穩態誤差,理論上可實現無靜差的輸出。離散化后的數字PI算法表達式為

式中:KP為比例系數;
K1為積分系數;
e(k)為本次誤差;
u(k)為本次控制量輸出。
由式(1)遞推可以得到
式(1)減去式(2)可得到增量式數字PI控制算法的表達式如下:
![]()
式(3)中的△u(k)即為數字調節器輸出的控制量的增量。所以,控制算法最終輸出的控制量為:
![]()
在裝置的實際工作當中,若負載為鉛酸蓄電池,則當能量正向流動(充電)時,系統可根據需要分別應用電壓閉環或電流閉環來控制裝置的輸出電壓和輸出電流。電壓、電流閉環采用的就是本文所述的增量式PI算法;當能量反向流動時,出于實際應用的需要,系統只對負載(蓄電池)側進行恒流控制。
2 電路工作過程分析
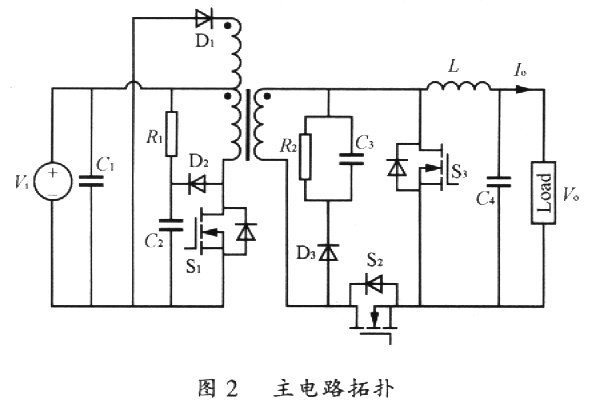
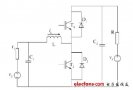
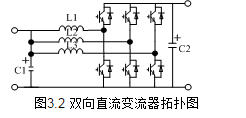
本文提出的主電路拓撲如圖2所示,主要包括:電源輸入側濾波電容C1;主開關管S1以及由R1、C2、D2組成的S1的SNUBBER電路;變壓器T以及為其原邊進行磁復位的第三繞組和為其副邊進行磁復位的由R2、C3、D3組成的鉗位電路;整流管S2、續流管S3和輸出濾波環節L及C4等幾部分。
2.1 能量正向流動時工作過程分析
為便于分析,假設此時負載為一只蓄電池。電路控制能量正向流動時,主電路每周期的工作總的來說可分為兩個階段,即正向流動階段和續流階段。但為了防止整流管S2和續流管S3同時導通造成變壓器副邊的貫穿短路,兩管的互補脈沖需要加入死區,因而最終電路的工作過程可分為4部分。主管S1、整流管S2、續流管S3的驅動信號如圖3所示,圖3中的l至4即分別對應了電路工作的4個階段。
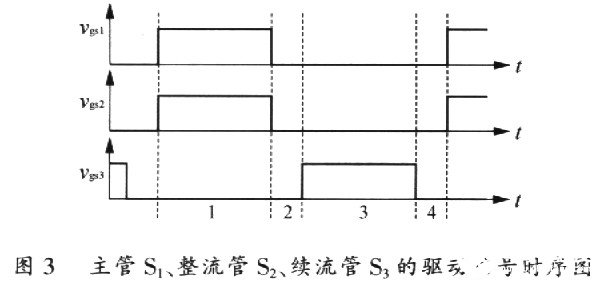
當能量正向流動時,若輸出電流流過管壓降較大的M0S管寄生體二極管,則會帶來很大的整流損耗和續流損耗。為此,我們應用了同步整流技術,使電流流過導通電阻只有6mΩ的MOS管,大大地減小了損耗、提高了效率。以下便是能量正向流動時4個工作階段的詳細分析。
階段l(能量正向流動) 此階段開始時,主管S1和整流管S2被觸發導通。輸入電流流入變壓器原邊繞組的同名端,輸出電流流出變壓器次邊繞組的同名端。此時能量由輸入側向負載側傳輸的方式同傳統的單端正激變換器基本一致,其電流流向如圖4(a)中所示。圖4(a)中的i1代表變壓器原邊電流,i2代表變壓器副邊電流(下同)。此過程直到主管關斷時才會結束。
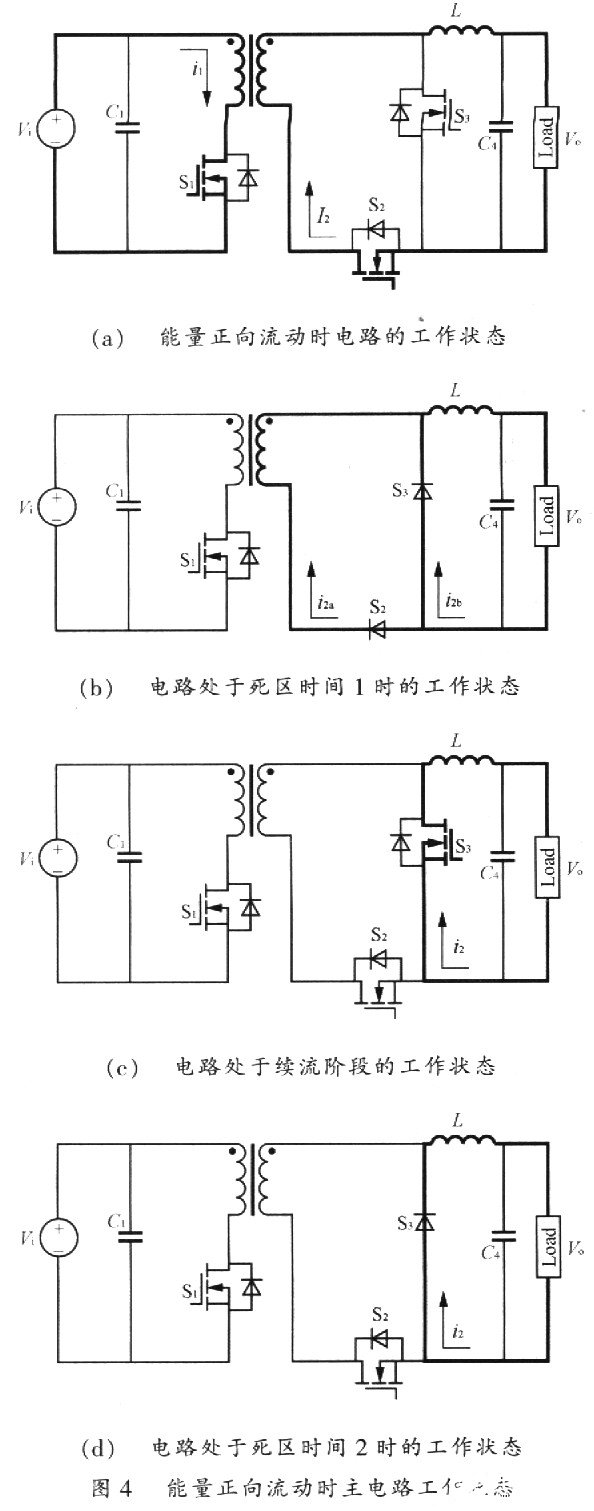
階段2(死區時間1) 此階段剛開始時,主管S2和整流管S2關斷,續流管S3仍未導通但其體二極管已經導通。由于變壓器漏感的限制,變壓器副邊的電流由輸出電流逐漸減小,而流過續流管體二極管的電流則由零開始逐漸增大。在此階段中,輸出電流在由整流回路向續流回路轉換。此過程電流方向如圖4(b)中所示。圖(b)中的i2a、i2b分別表示負載電流流經整流管和續流管的兩部分。
階段3(續流階段) 在此階段開始時,續流管S3被觸發導通,所以輸出電流主要經由S3續流,因而損耗大為降低。此階段將持續到續流管S3關斷時才會結束,其電流流向如圖4(c)所示。
階段4(死區時間2) 此階段剛開始時,續流管S3關斷,但其體二極管仍導通續流。輸出電流完全經由續流管的體二極管進行續流。此階段直至主管導通以后才會中止。此過程電流方向如圖4(d)所示。至此,主電路一周期的工作已經結束。當電路下一次的動作時,主管S1和整流管S2又會導通,電路又重新進入階段1時的工作狀態。
2.2 能量反向流動時工作過程分析
在能量反向流動時,電路的工作過程與BOOST電路基本一致,可大體分為兩個階段。
階段l(續流) 此階段當中,續流管導通、整流管關斷,蓄電池放電電流i1流過電感線圈L,電流線性增加,電能以磁能形式儲在電感線圈L中。此過程電流方向如圖5(a)所示。
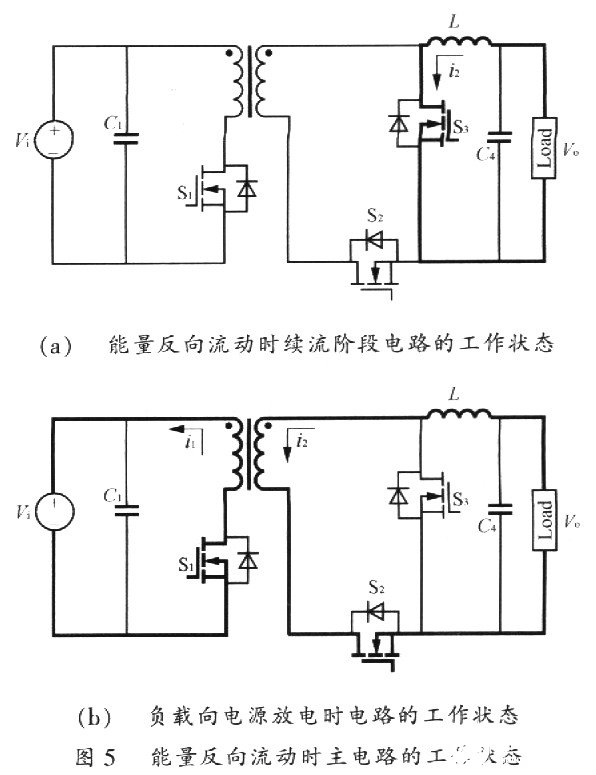
階段2(反向放電) 此階段當中,續流管關斷、整流管導通。電感L將其中儲存的磁能轉化為電能與蓄電池一起向輸入側放電。其電流流向如圖5(b)中所示。
2.3 變壓器、電感、電容參數的選取
綜合電源體積、系統效率、控制精度、器件耐壓等諸多因素的考慮,本文選取的工作頻率f=55 kHz,T=1/f,最大占空比Dmax為0.4,則主管S1的最大導通時間toNmax為
![]()
3.1 變壓器的計算
變壓器副邊電壓Vs按式(6)計算。

式中:Vo代表輸出電壓;
Vf代表變壓器副邊的管壓降和輸出濾波電感的壓降。
則變壓器副邊最低電壓應為

若輸入電壓Vp的最小值為VPmin,于是可求得變比n為
式中:Bm為鐵心的最大工作磁通密度;
S為變壓器磁芯的有效截面積。
因此,可求得變壓器原邊繞組匝數N1為:

在計算第三繞組時,首先應根據伏秒積平衡的原則計算復位電壓Vr為

式中:tDFFmin為主管S1的最短關斷時間;
VPmax為最大輸入電壓。
然后可求得負責變壓器原邊磁通復位的第三繞組的匝數N3為

2.3.2 輸出濾波電感L的計算
要計算輸出濾波電感的電感量,首先應確定流經電感的電流△IL的大小。從電感線圈的外形尺寸、成本、過渡響應等方面考慮,△IL取輸出電流Io的10%~30%比較合適。在本文中,為了更好地限制輸出電流中的紋波含量,取△IL為輸出電流Io的10%。綜上,由式(13)可求得電感L的大小。

2.3.3 輸出電容C4的計算
輸出電容的大小豐要由輸出紋波電壓抑制的限值而確定,也就是由△IL以及輸出電容的等效串聯電阻ESR確定。通常輸出紋波電壓取為輸出電壓的0.3%~O.5%,在本文中紋波電壓取0.3%。所以,可求得

在求出ESR后,可根據廠家提供的產品手冊選取合適的濾波電容。
3 實驗結果
IRL3803,變壓器原邊磁復位電路中所用的二檄管為PHILIPS(飛利浦)的BYV26G。這里必須指出的是,在進行整流管和續流管的選型時,除了要考慮功率器件的耐壓、通流能力外,還應特別注意導通電阻值的大小。本文選擇的IRL3803是IR公司推出的專門用于同步整流的MOS管,導通電阻只有6mΩ,能夠最大程度減小導通損耗和從而減小發熱。由式(5)~式(14)計算可得變壓器原邊、副邊、第三繞組的變比為170:3:255;輸出濾波電感為14.72μH;電容為9900μF。負載為單體鉛酸蓄電池。
實驗主要技術條件如下:開關頻率為55kHz。正向工作時,輸入電壓Vi為400(1±5%)V,額定輸出電壓Vo為2V、輸出電流為20A;反向工作時,輸入電壓為2(1±10%)V。
經測最,系統工作時穩壓、穩流精度均可達到小于O.5%的設計要求;裝置最高效率為86.7%。主要實驗波形如圖6~圖8所示;能量正/反向流動時,系統的效率曲線如圖9所示。
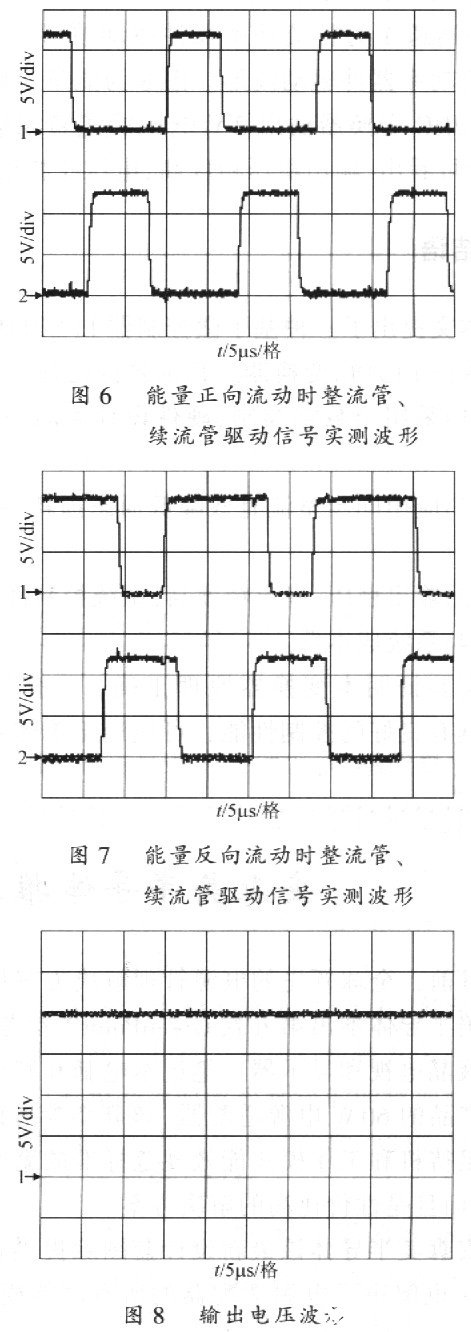
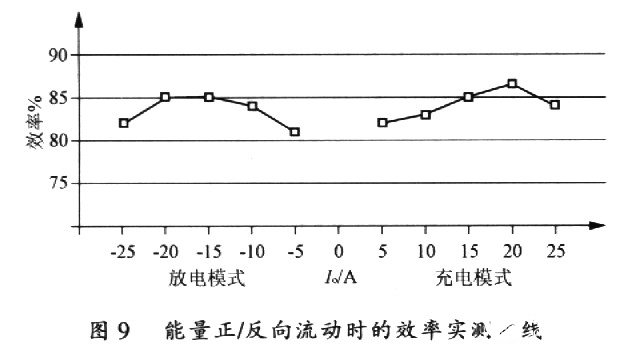
圖6為給蓄電池充電時整流管、續流管驅動信號的實測波形。此時原邊主管波形與整流管完全同步。圖6中通道l為整流功率器件的驅動波形,通道2為續流功率器件的驅動波形。圖7為能量反向流動時,整流功率器件、續流功率器件的驅動信號實測波形,此時原邊主功率器件不動作。圖7中通道1為整流功率器件驅動波形,通道2為續流功率器件驅動波形。圖8為能量正向流動時,DC/DC變換器輸出2V電壓的實驗波形。從圖8中可看出,輸出穩壓精度高,電壓紋波很小。
4 結語
本文提出了一種基于微控制器LPC2119的全數字雙向DC/DC變換器。其主要特性有:
(1)采用全數字控制,硬件設計簡潔、可靠性高;
(2)應用同步整流有效降低通態損耗,系統效率高;
(3)輸出穩壓、穩流精度高,系統控制性能好;
(4)系統成本低。
實驗證明本變換器原理正確,工作安全可靠且具有良好的控制性能,可應用于單體蓄電池充/放電等多種既要輸出低壓大電流又要控制能量雙向流動的場合,具有廣闊的市場前景。
責任編輯:gt
-
芯片
+關注
關注
453文章
50387瀏覽量
421785 -
開關電源
+關注
關注
6448文章
8288瀏覽量
480624 -
變換器
+關注
關注
17文章
2087瀏覽量
109135
發布評論請先 登錄
相關推薦
基于ARM7內核LPC2119芯片實現雙向變換器的設計
【GoKit申請】雙向 DC-DC 變換器
基于LPC2119設計配電控制模塊
基于STM32的雙向DC-DC變換器設計
基于HEV雙向DC DC變換器的研究與設計
基于ARM LPC2119的水情監測設計
雙向DC/DC變換器電路
雙向DC-DC變換器的優化控制方法
電動汽車雙向DC/DC變換器的研究
雙向直流變換器,嚴仰光,雙向DC-DC變換器的經典課本!






 工商網監
工商網監
評論