") 華為快速建立了第一條車規(guī)級激光雷達的第一條Pilot產線
華為快速建立了第一條車規(guī)級激光雷達的第一條Pilot產線
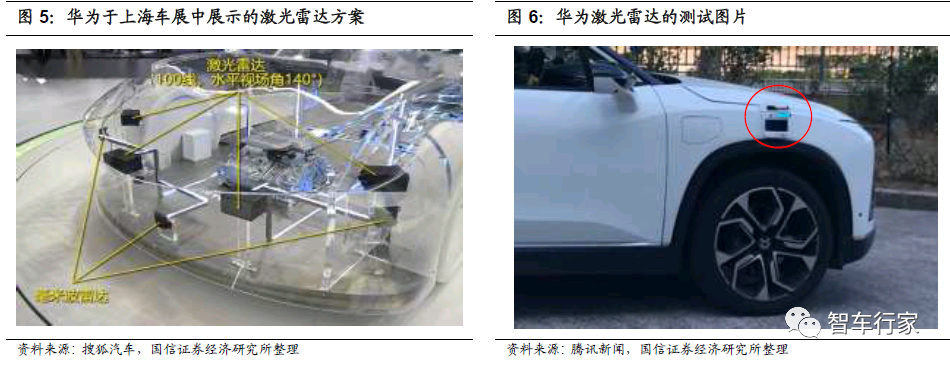
華為12月首次面向行業(yè)正式發(fā)布車規(guī)級高性能激光雷達產品和解決方案。這是一款96 線中長距激光雷達產品,可以實現(xiàn)城區(qū)行人車輛檢測覆蓋,并兼具高速車輛檢測能力,更符合中國復雜路況下的場景。華為的激光雷達產品在性能與可靠性方面都滿足車規(guī)級要求,依托在光通訊領域積累的精密制造能力以及先進工藝裝備實驗室,華為快速建立了第一條車規(guī)級激光雷達的第一條Pilot 產線,已按照年產10 萬套/線推進產能,以適應未來大規(guī)模量產需求。
激光雷達的市場格局
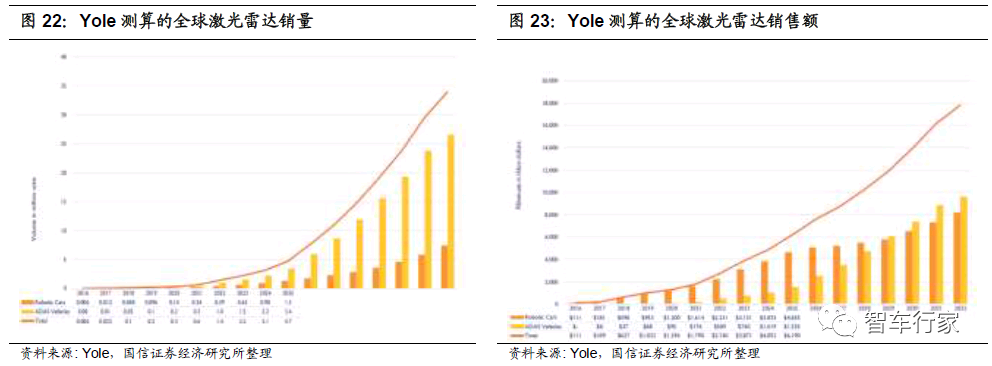
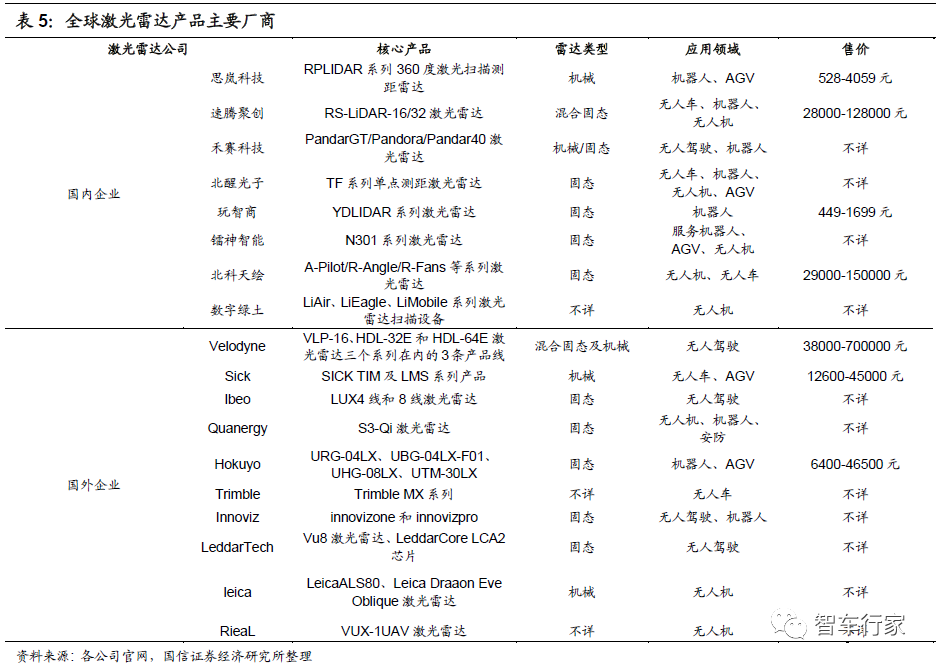
市場總量:根據(jù)咨詢機構 Yole 的數(shù)據(jù),在 2020 年,全球激光雷達出貨量大約為 34 萬個,用于智能駕駛的大約 20萬個;全球激光雷達的銷售額約 12.95 億美元,智能駕駛相關的銷售額大約為 9500 萬美元。
至 2025 年,全球激光雷達的出貨量有望達到 470 萬個,其中用于智能駕駛的大約 340 萬個;全球激光雷達銷售額有望達到 61.9 億美元,智能駕駛相關的銷售額大約為 15.35 億美元。
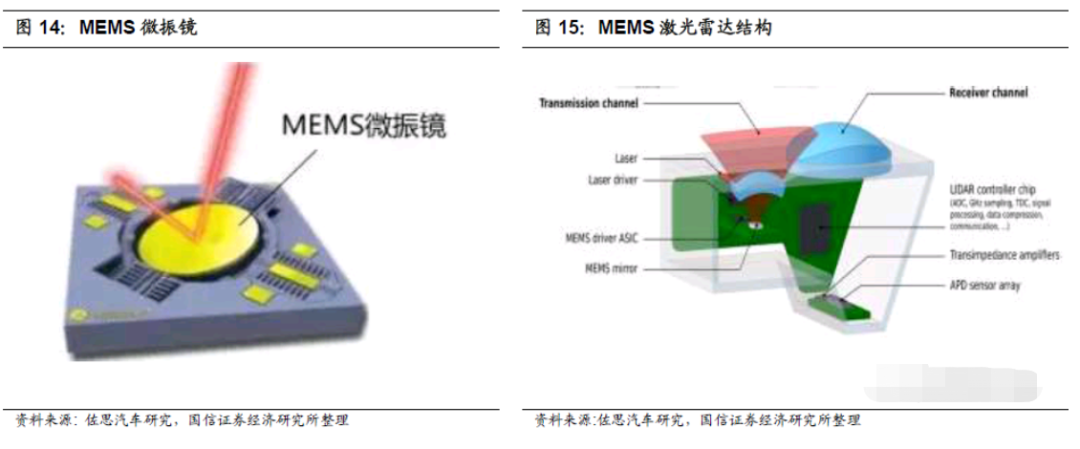
主要玩家:激光雷達目前國外巨頭主要是 Velodyne、Ibeo 和 Quanergy 三家。國內除華為外,還有禾賽科技、速騰科技、鐳神、一徑科技、思嵐科技等。著名無人機企業(yè)大疆內部孵化的 Livox 于 2020 年發(fā)布了兩款激光雷達產品,售價分別為 6499 元和 9000元,線數(shù)分別等效于傳統(tǒng) 64 線和 128 線。
車載激光雷達的定位:華為汽車業(yè)務在“云-管-端”的架構下,發(fā)力智能駕駛、智能網聯(lián)、智能座艙、智能電動、智能車云五大模塊,其中智能駕駛對應“端”。智能駕駛的工作原理是通過激光雷達、毫米波雷達等感知層硬件來探測汽車周圍的環(huán)境,獲取數(shù)據(jù)后傳輸至決策層進行處理判斷,最后由執(zhí)行層硬件具體控制車輛的行駛活動。
激光雷達是智能駕駛感知層的的關鍵傳感器,是目前實現(xiàn) 3D 空間建模的必備硬件。相比于毫米波雷達和攝像頭,激光雷達在目標輪廓測量、角度測量、光照穩(wěn)定性、通用障礙物檢出等方面都具有出色的性能表現(xiàn)。
華為激光雷達定位前裝量產:華為激光雷達產品的研發(fā)始于 2016 年,在調研主流車企對激光雷達產品的需求后,華為明確了研發(fā)攻關方向,即做一款性能優(yōu)越,符合車規(guī)級標準,能夠大規(guī)模前裝量產的激光雷達。在研發(fā)過程中,華為的激光雷達首先具體分析了實際行駛過程中的難點場景,比如地庫場景、隧道場景等;然后,華為進一步明確了激光雷達的規(guī)格定義,對測距規(guī)格、水平 FOV 和垂直 FOV 規(guī)定了性能要求;最后,華為考慮了激光雷達實際安裝適配的問題,對安裝數(shù)量、安裝位置、環(huán)境適應性問題制定了具體的解決方案。
華為激光雷達產品實現(xiàn)了性能、成本、可靠性三方面的平衡。
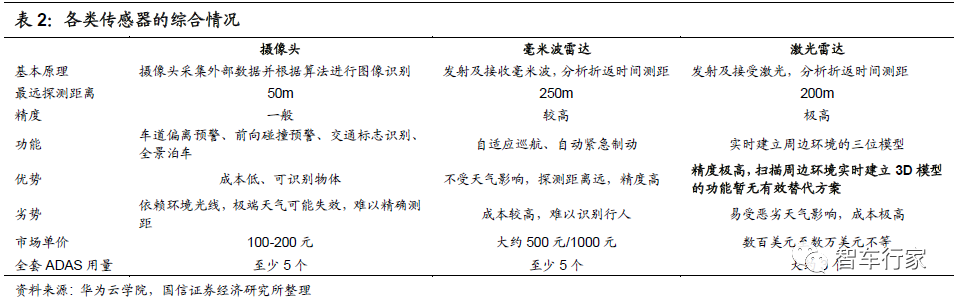
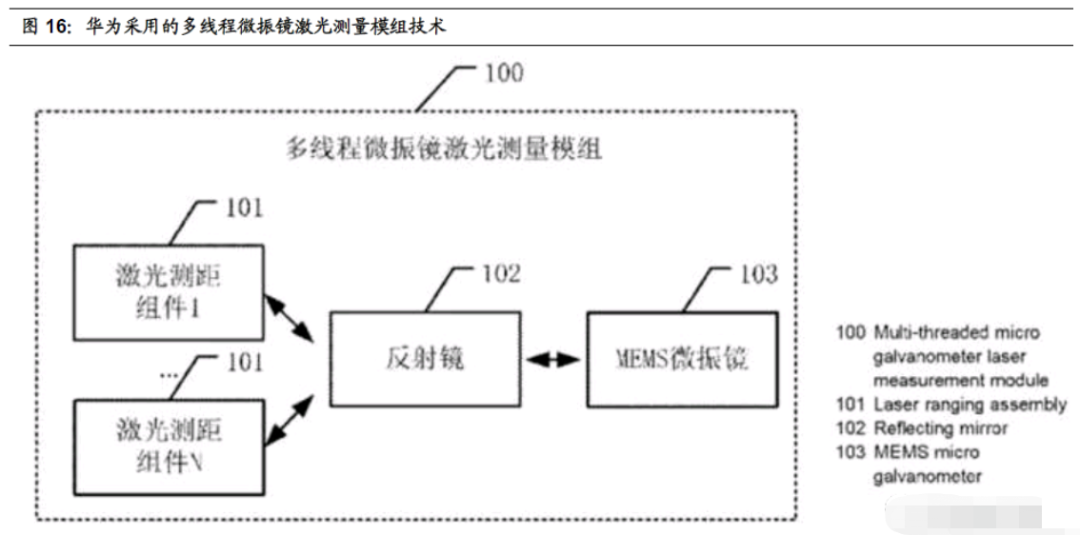
在前文中我們已經提到,按掃描方式劃分,激光雷達可分為 MEMS、Flash、相控陣、機械旋轉式四類。根據(jù)2020年世界知識產權組織對華為激光雷達技術專利的披露,華為的產品應該屬于 MEMS 激光雷達,并且采用多線程微振鏡激光測量模組技術進行了改進。
MEMS 激光雷達的特征:MEMS 激光雷達與機械激光雷達相比,有三大優(yōu)勢。
1)機械結構簡化:微振鏡幫助 MEMS 激光雷達拜托了馬達、多棱鏡等機械裝置,毫米級尺寸的微振鏡縮減了激光雷達的尺寸;
2)成本降低:微振鏡的引入可以有效降低激光器和探測器的需求數(shù)量,機械激光雷達的發(fā)射模組數(shù)量與線數(shù)完全同步,但是 MEMS 僅需一束激光光源就可以通過微振鏡反射來實現(xiàn)多線數(shù)的效果;
3)分辨率高:MEMS 微振鏡可以精確控制光線角度,而機械激光雷達僅可以調整馬達轉速。同時,MEMS 激光雷達由于只采用一組激光發(fā)射和接收裝置,激光功率較低,也存在著信噪比較低、有效距離較短和 FOV 較窄的問題。
激光雷達是 L3-L5 級別智能駕駛的核心零部件,從 L3 級別開始應用,部分外資廠商生產的 64 線激光雷達價格高達 8 萬美元。華為的 96 線激光雷達目前的成本大約在數(shù)百美元,未來計劃將成本壓縮至 200 美元。
目前常見的車載激光雷達都是置于車頂,在華為的智能駕駛解決方案中,每輛車需要大約3 個激光雷達,將分布在車頭前格柵處和車前左右兩側輪眉上方。
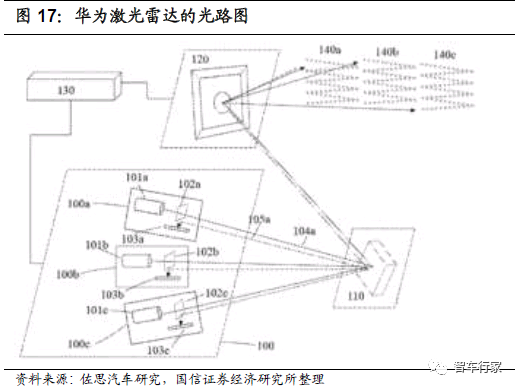
華為激光雷達產品實現(xiàn)了功率與成本的平衡:華為針對 MEMS 激光雷達功率較低的問題,采用多線程微振鏡激光測量模組技術做了改進。華為借鑒了機械激光雷達的做法,采用了多個發(fā)射和接收組件,利用 MEMS 振鏡的垂直掃描密度易于控制的優(yōu)點,使同線數(shù)下的華為產品所含有的激光發(fā)射接收模組的數(shù)量處于機械激光雷達和 MEMS 激光雷達之間,在提升功率和控制成本之間實現(xiàn)了平衡。
華為的這種技術模式可以快速推出多種用途的激光雷達,適應不同的市場需求。華為的激光雷達定位為中距激光雷達,最遠可達到大約 150 米的探測距離,其水平視野可達到FOV120 度的視角。
華為重構了激光雷達的核心部件:得益于 ICT 領域光學設計、信號處理、整機工程等長期積累,華為重構了激光雷達的核心部件,包括發(fā)送模塊,接收模塊和掃描器。
比如:華為選擇微轉鏡掃描器架構,不是簡單的做微轉鏡,而是解構了電機、軸承等關鍵部件,通過精準的掃描控制,提升點云精度的穩(wěn)定性與一致性;收發(fā)端華為通過精準的光路控制,精巧的電路設計來提升收發(fā)模塊的光電轉換效率。
華為激光雷達產品的可靠性滿足多項車規(guī)級要求:華為車載激光雷達的可靠性不僅來源于車規(guī)級器件選型、還依賴整體架構設計以及海量可靠性測試驗證。電機作為核心部件,車規(guī)能力一直是行業(yè)關注的重點,華為憑借了 20 年深厚的機電能力積累和 25 億次電機可靠性測試經驗,設計了滿足車規(guī)要求的激光雷達掃描電機。
此外,針對車規(guī)要求的高低溫濕熱,水壓、振動、鹽霧、人眼安全、EMC(電磁兼容)、碎石沖擊等場景,華為都嚴格按照 ISO 國際標準執(zhí)行,甚至基于 TOP 車企的特殊要求,做了更加嚴苛的測試。華為有信心成為全球第一個真正車規(guī)的高線束激光雷達的供應商。

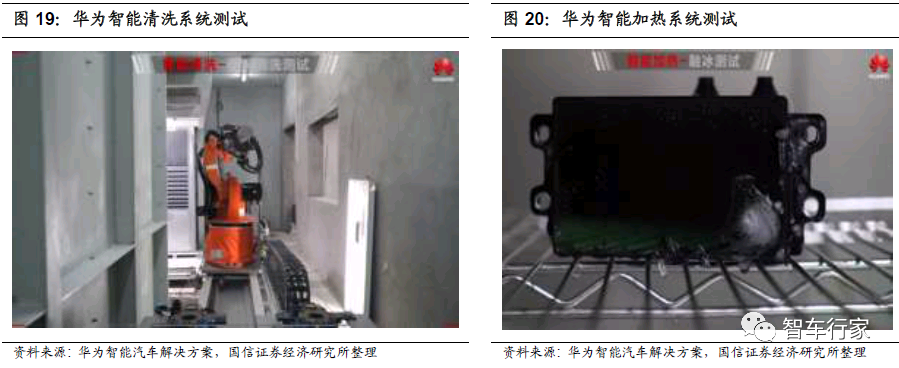
華為激光雷達具有強大的清洗與加熱功能:在激光雷達被臟污覆蓋的場景下,可使用智能清洗系統(tǒng),華為做了大量測試來驗證不同的噴嘴、不同的位置、不同水壓的清洗效果。由于行駛過程中也需要清洗,為了很好地測試這個場景,華為自主設計了智能清洗風洞系統(tǒng),模擬在 130km/h 下清洗能力,然后再測試不同的噴嘴和壓力對清洗效果的影響,得到寶貴的一手數(shù)據(jù)。除了智能清洗系統(tǒng)外,華為也開發(fā)了智能加熱系統(tǒng)。在被霜、霧、凝露、薄冰覆蓋的場景,激光雷達內置的智能加熱系統(tǒng)會自動啟動。
華為激光雷達產品有望配套長安、北汽:在 2020 年廣州車展前,長安汽車董事長宣布,將攜手華為、寧德時代,一起打造高端智能汽車品牌。在其公布的長安方舟架構中,將預留 36 個傳感器,其中包含 5 個激光雷達。
在 2020年 11 月的“互聯(lián)網汽車烏鎮(zhèn)夜話”論壇上,北汽 ARCFOX BU 總裁透露,北汽和華為聯(lián)合打造了 ARCFOX 極狐最新款產品 HBT。新車搭載 3 顆 96 線激光雷達、6 個毫米波雷達、12 個攝像頭、13 個超聲波傳感器,華為提供的芯片算力達到 352 萬億次每秒。
華為激光雷達產業(yè)鏈布局:華為哈勃在激光雷達產業(yè)鏈上主要投資了分別為縱慧芯光(VCSEL 芯片)、炬光科技(激光雷達發(fā)射端)、南京芯視界(SPAD)、裕太微電子(汽車以太網 PHY)。
1)縱慧芯片的產品 VCSEL 芯片是激光雷達的光源。作為一種光電半導體,VCSEL 廣泛應用于智能手機、數(shù)據(jù)通信、激光雷達等領域。縱慧芯片同時也是華為手機 ToF 光源的主要供應商,自有 6 寸外延產線。
2)南京芯視界的產品有單光子雪崩二極管 SPAD(接收器),SPAD 對光具有高敏感度,裝配 SPAD 的激光雷達可以準確探測低反射率的物體,例如暗色著裝的行人等。
3)裕太微的主要產品是汽車以太網 PHY 芯片,汽車以太網也是新型汽車電子電器架構的主干網絡,以太網 PHY 不止用在激光雷達中傳輸點云數(shù)據(jù),在毫米波雷達、智能座艙、自動駕駛域控制器上均有應用。
華為里程碑:華為早在 2014 年就成立了“車聯(lián)網實驗室”,致力于汽車互聯(lián)化、智能化、電動化和共享化的技術創(chuàng)新,延伸華為“端、管、云”的 ICT 能力,面向智能網聯(lián)電動汽車的應用場景儲備技術。2019 年 5 月華為正式成立智能汽車解決方案 BU,進一步明確了自身的定位和業(yè)務邊界:華為不造車,聚焦 ICT 技術,提供智能網聯(lián)汽車增量部件,幫助車企造好車。如今,華為自主研發(fā)的激光雷達產品正式發(fā)布,是華為在智能駕駛感知層零部件的重大突破,構成了華為汽車業(yè)務體系的重要一環(huán)。
激光雷達的性能優(yōu)勢:分辨率高,信號精度高,3D 空間建模
各類傳感器的性能優(yōu)劣:智能駕駛感知層的主要硬件有攝像頭、毫米波雷達和激光雷達,其中激光雷達性能最優(yōu)、成本最高,是目前實現(xiàn) 3D 空間建模的必備硬件。這三種感知硬件可以同時使用,通過卡爾曼濾波算法實現(xiàn)融合傳感:
1) 攝像頭是視覺影像處理系統(tǒng)的基礎,適用于目標分類,比如交通信號燈分類、車道檢測等,探測精度一般,可實現(xiàn)車道偏離預警、全景泊車等較為基礎的 ADAS 功能;
2) 毫米波雷達的波長介于厘米波和光波之間,兼有微波制導和光電制導的優(yōu)點,能夠大范圍檢測車輛的運行情況,可實現(xiàn)自適應巡航、自動緊急剎車等 ADAS 功能;
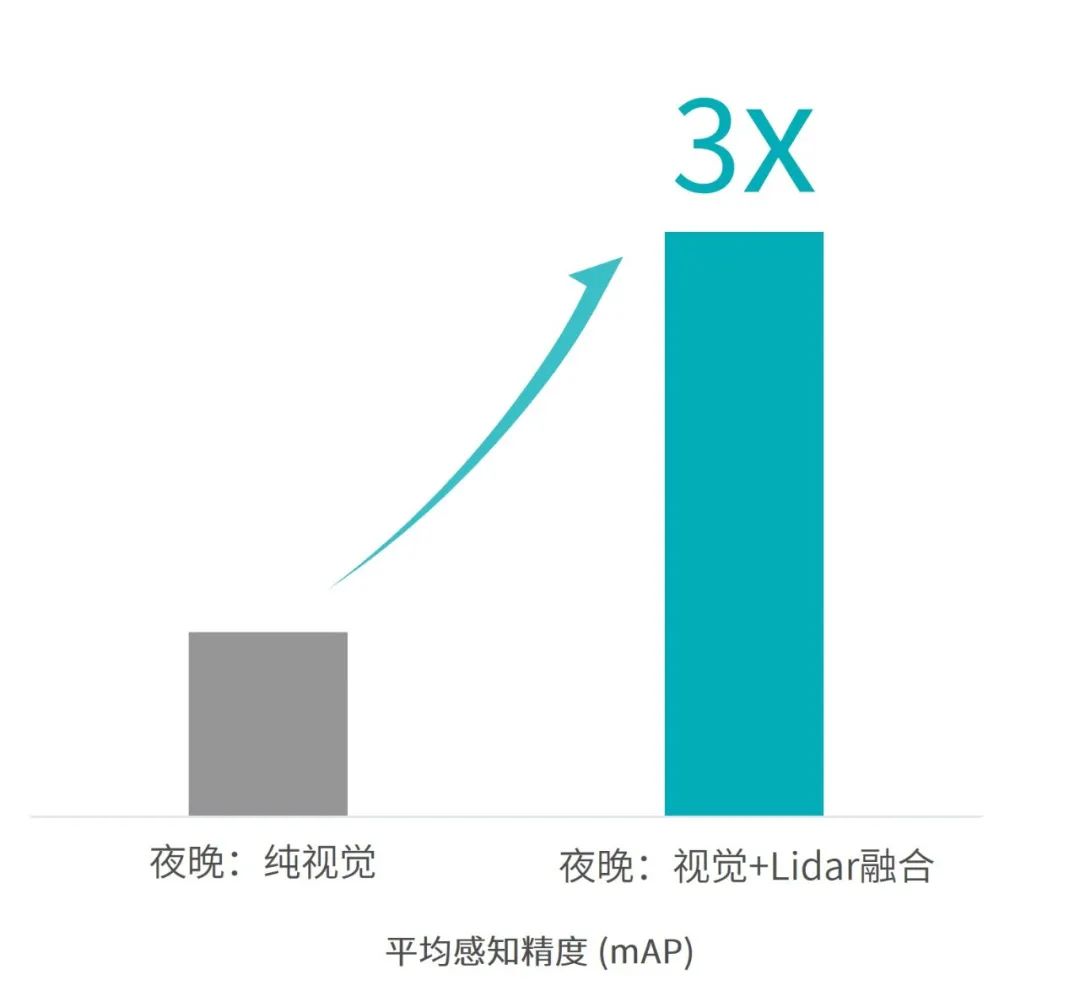
3) 激光雷達性能最優(yōu),分辨率高,精度極高,抗有源干擾能力強,可以通過點云數(shù)據(jù)實現(xiàn) 3D 空間建模,即使在夜間仍能準確檢測障礙物。
各類傳感器的價格與用量:車載攝像頭的價格近年來持續(xù)走低,2010 年市場價大約 300 元,2014 年降至大約 200元,目前部分車載攝像頭價格已低至 100 元以內,要實現(xiàn)全套 ADAS 功能,單車至少需要配備 5 個攝像頭。
毫米波雷達按頻率劃分主要有 24GHZ 和 77GHZ 兩種,價格分別大約為 500 元和 1000 元,要實現(xiàn)全套 ADAS 功能一般至少需要“1 長+4 短”共 5 個毫米波雷達。
激光雷達的原理:激光雷達(LiDAR, Light Detection and Ranging)是激光探測及測距系統(tǒng)的簡稱,是以發(fā)射激光束探測目標的位置、速度等特征量的雷達系統(tǒng),由激光發(fā)射機、光學接收機、掃描系統(tǒng)和信息處理系統(tǒng)等組成。
其工作原理是向目標發(fā)射探測信號(激光束),然后將接收到的從目標反射回來的信號(目標回波)與發(fā)射信號進行比較,作適當處理后,即可獲得目標的有關信息,如目標距離、方位、高度、速度、姿態(tài)、甚至形狀等參數(shù),從而實現(xiàn)對目標進行探測、跟蹤和識別。激光雷達生成的通常是點云數(shù)據(jù)。
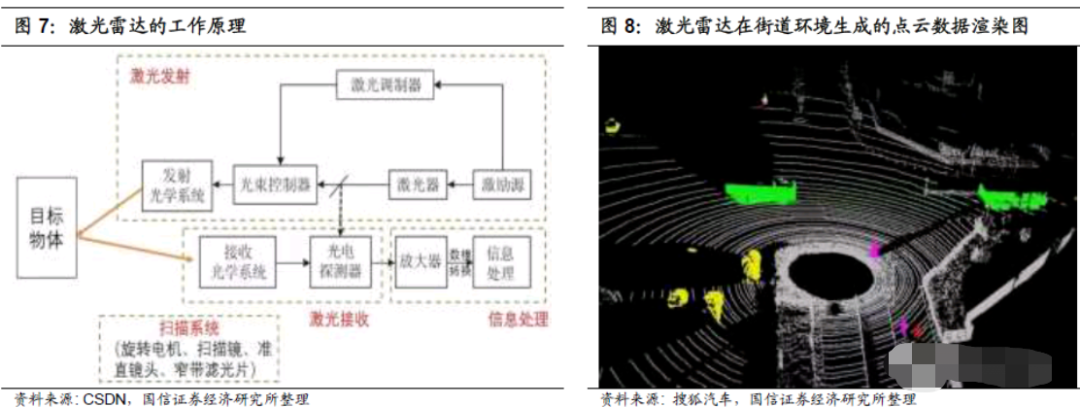
四個系統(tǒng),九個指標:從激光雷達內部的運轉流程來看,可以劃分為四大系統(tǒng)。
1)激光發(fā)射系統(tǒng):激勵源驅動激光器按一定周期發(fā)射激光脈沖,激光調制器通過光束控制器對激光的方向和線數(shù)進行調試,然后通過發(fā)射系統(tǒng)將激光射向目標;
2)激光接收系統(tǒng):光電探測器接受目標物體反射回來的激光,產生接收信號;3)信息處理系統(tǒng):接收信號經過放大處理和數(shù)模轉換,由信息處理模塊進行分析計算,獲取目標表面形態(tài)、物理屬性等數(shù)據(jù)并建立 3D 空間模型。
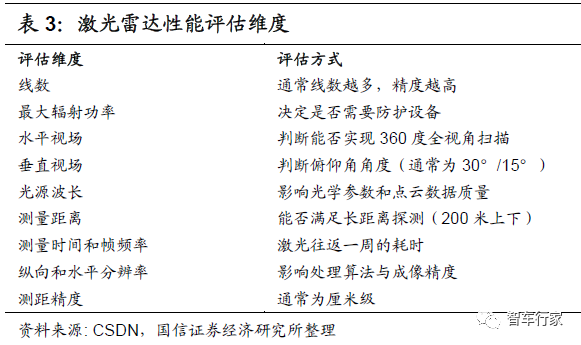
4)掃描系統(tǒng):以穩(wěn)定的速度進行旋轉,同時對所在平面的掃描,獲取實時的平面圖信息。此外,一款激光雷達的性能具體可以從九個維度去做評估。
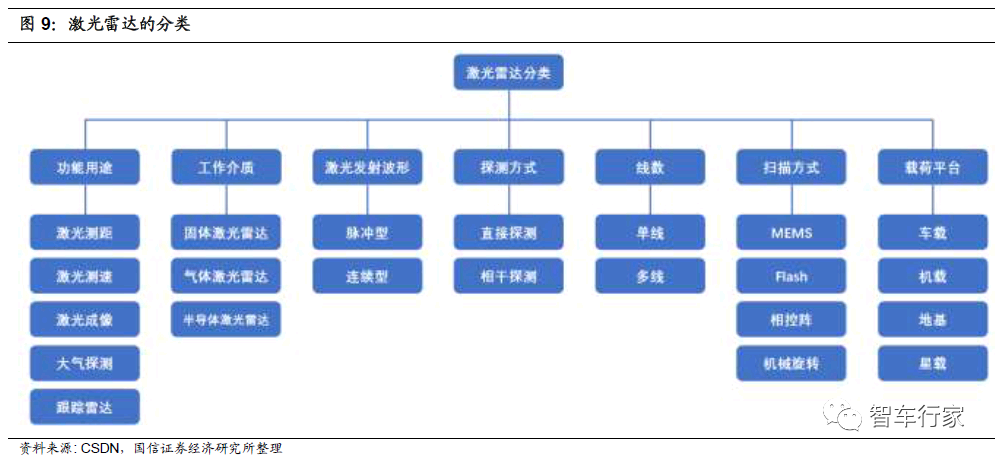
激光雷達的分類:激光雷達集激光、全球定位系統(tǒng)(GPS)、和 IMU(慣性測量裝置)三種技術于一體,具有廣泛的應用場景,可以按照功能用途、工作介質、激光發(fā)射波形、探測方式、線數(shù)、掃描方式、載荷平臺等方式進行多種分類。
激光雷達的五項關鍵技術
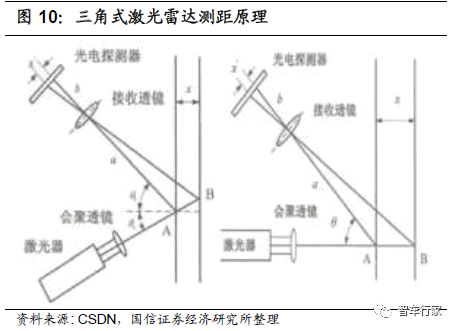
測距技術:激光雷達主要有兩種測距方法,一種是基于時間的測量方法飛行時間法(TOF),主要有脈沖式和三角式);另一種是不基于時間的測量方法,主要是相位式和調頻連續(xù)波(FMCW)。
1)脈沖式,也叫直接式,通過公式距離=光速 X 激光往返時間/2 即可測得目標距離。
2)三角式,也叫間接式,將光源、被測物、接收系統(tǒng)三點組成一個三角形光路,接收系統(tǒng)接收來自于被測物面的散射光,并將其成像在光電探測器敏感面上,通過光點在敏感面上的位移,從而計算出被測物的移動距離。
3)相位式,將一調制信號對激光光強進行調制,通過測量相位差來間接測量往返時間,計算公式為距離=信號波長/2X 相位差/(2 π)。
4)調頻連續(xù)波,通過比較反射信號與發(fā)射信號頻率的方法來得到目標的距離信息。脈沖式和三角式難度較大,精度也較低,相位式適用于終端距離測量,是目前精度最高的一種方式。
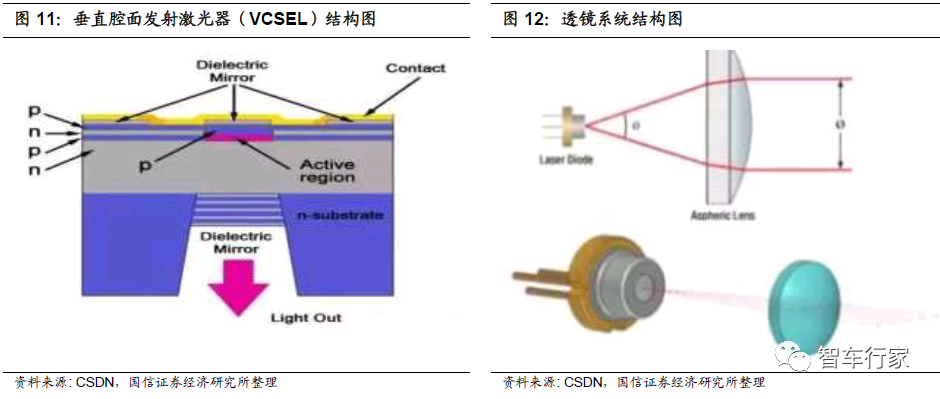
發(fā)射技術:激光的發(fā)射需要激光發(fā)射器與透鏡系統(tǒng)協(xié)同完成。
1)激光發(fā)射器有半導體激光器、固體激光器、光纖激光器和二氧化碳氣體激光器四種類型。無人駕駛大多采用半導體激光器,分為激光由邊緣發(fā)出的邊發(fā)射激光器(EEL)和激光垂直于頂面的垂直腔面發(fā)射激光器(VCSEL)。垂直腔面發(fā)射激光器,其出射光束圓形對稱,光能轉換效率高,光源具有高度一致性和高指向性等優(yōu)點,被業(yè)界看好。
2)透鏡系統(tǒng),一般由準直鏡、擴束鏡和輔助光學系統(tǒng)組成。準直鏡是為了解決激光器準直輸出問題,擴束鏡為了解決激光發(fā)散角問題,而輔助光學系統(tǒng)為了解決激光束偏振太難控制、光隔離等問題。
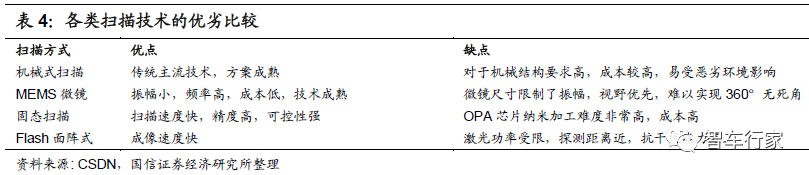
掃描技術:激光雷達的掃描技術直接關系到 3D 空間模型的搭建,可以分為掃描式和 Flash 面陣式兩種。
1)掃描式激光雷達具體有三種技術路徑可以實現(xiàn):機械式掃描是將激光雷達安裝在車頂以一定的速度旋轉,在水平方向采用機械 360°旋轉掃描,在垂直方向采用了定向分布式掃描;MEMS(微電機系統(tǒng))微鏡是把所有機械部件集成到單個芯片上,利用半導體工藝生產,以電的方式來控制光束;固態(tài)掃描,采用光學相控陣(OPA)技術,由元件陣列組成,通過控制每個元件發(fā)射光的相位和振幅來控制光束。
2)Flash 面陣式,用激光器同時照亮整個場景,對場景進行光覆蓋,一次性實現(xiàn)全局成像。目前 MEMS 和 Flash 技術越來越受到激光雷達廠商的重視,有望逐步取代傳統(tǒng)的機械式激光雷達。
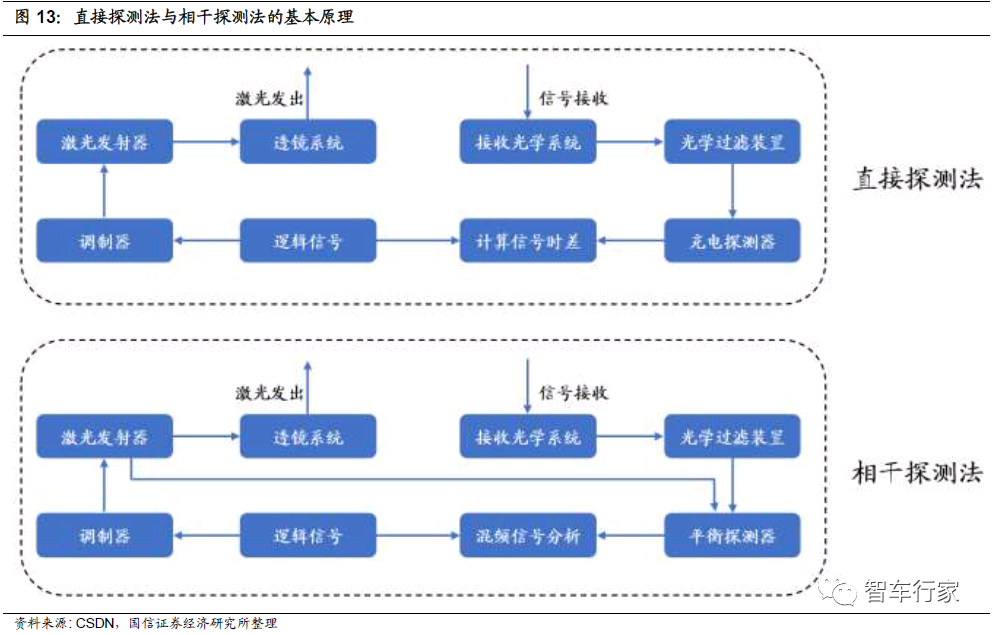
探測技術:目前有兩種主流的探測技術,即直接探測法與相干探測法。
1)直接探測法,利用探測器的光電轉換功能直接實現(xiàn)對光信號的信息解調,系統(tǒng)簡單但是精度較低;
2)相干探測法,額外添加一路激光輸出,對信號進行混頻分析,靈敏度和精度較高,但是系統(tǒng)比較復雜。激光探測的核心器件是光電探測器,能把光能轉換成一種便于測量(電壓或電流)物理量的半導體器件,主要有 PIN 光電二極管、雪崩二極管(APD)、單光子雪崩二極管(SPAD)和硅光電倍增管(SiPM)等。
數(shù)據(jù)處理技術:激光雷達數(shù)據(jù)處理的主要任務是對信號進行分析計算,完成三維圖像重構。目前主要采用大規(guī)模集成電路和計算機完成,可利用 FPGA 技術(Field Programmable Gate Array)和高速 DSP 等完成。
我們認為,華為入局對國內智能汽車生態(tài)整體利好,有望發(fā)揮現(xiàn)有手機電子算法優(yōu)勢,結合資金、人才優(yōu)勢,將原來掌握在國際巨頭谷歌、英偉達、Velodyne 等手中的智能汽車關鍵要素國產化,同時帶動產業(yè)鏈上游硬件企業(yè)、產業(yè)鏈軟件合作企業(yè)的蓬勃發(fā)展。
責任編輯:lq
-
華為
+關注
關注
216文章
34327瀏覽量
251222 -
智能駕駛
+關注
關注
3文章
2461瀏覽量
48660 -
激光雷達
+關注
關注
967文章
3943瀏覽量
189627
原文標題:華為車規(guī)級激光雷達報告,實現(xiàn)性能、成本、可靠性平衡
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
什么樣的激光雷達才能讓AEB更安全
請教,SIM卡PCB走線,這個CKL時鐘線和數(shù)據(jù)線DATA要等長嘛,一條走頂層一條走底層如圖這樣可以嘛
遲滯比較器的輸出為一條直線的原因
esp32_c3 flash存儲如何實現(xiàn)連續(xù)存儲?
亮道智能:發(fā)布全新一代激光雷達,未來主攻固態(tài)激光雷達低價市場

速騰聚創(chuàng)車規(guī)級激光雷達銷量領跑全球
UCB_SWAP配置信息共16條,寫入一條有效配置后,上一條需寫1使配置無效是為什么?

英諾賽科發(fā)布100V車規(guī)級GaN推進汽車激光雷達市場

【洞見芯趨勢】決戰(zhàn)智駕,2024年或是激光雷達的天下!

在額定轉速以下運行時,勵磁采用電壓控制好還是電流控制好呢?
賽富樂斯首條硅基Micro-LED微顯示屏產線正式貫通
激光雷達燒壞攝像頭?
- 設計技術
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術
- 測量儀表
- 嵌入式技術
- 制造/封裝
- 模擬技術
- RF/無線
- 接口/總線/驅動
- 處理器/DSP
- EDA/IC設計
- 存儲技術
- 光電顯示
- EMC/EMI設計
- 連接器
- 行業(yè)應用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網絡
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實
- 可穿戴設備
- 機器人
- 安全設備/系統(tǒng)
- 軍用/航空電子
- 移動通信
- 工業(yè)控制
- 便攜設備
- 觸控感測
- 物聯(lián)網
- 智能電網
- 區(qū)塊鏈
- 新科技
- 華秋
- 關于我們
- 投資關系
- 新聞動態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報投訴
- 社交網絡
- 微博
- 移動端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內容合作
- 黃晶晶:huangjingjing@elecfans.com
- 內容合作(海外)
- 張迎輝:mikezhang@elecfans.com
- 供應鏈服務 PCB/IC/PCBA
- 江良華:lanhu@huaqiu.com
- 投資合作
- 曾海銀:zenghaiyin@huaqiu.com
- 社區(qū)合作
- 劉勇:liuyong@huaqiu.com
-
關注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



版權所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經濟技術開發(fā)區(qū)航空路6號手機智能終端產業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網安備43011202000918 工商網監(jiān)
湘ICP備2023018690號-1
工商網監(jiān)
湘ICP備2023018690號-1
評論