 淺析FB420的用法-專用于PM277控制屏的夾具功能塊
淺析FB420的用法-專用于PM277控制屏的夾具功能塊
FB420
該模塊用于控制最多可帶 8 個末位反饋信號的二位五通或三位五通氣動換向閥。末位反饋信號以字節的方式設置給該模塊。該模塊一般采用自己的背景數據模塊進行訪問。
此功能塊被VASS標準規定只用于MP277手動線夾具專用的功能塊.
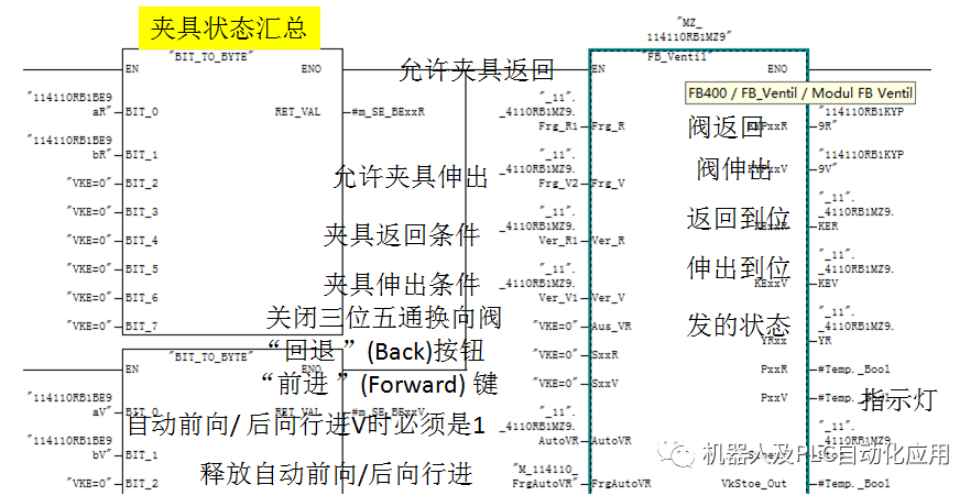
輸出控制
輸出控制的發生取決于五位兩通或五位三通換向閥的操作類型 ("Cfg Bit 00" )。"Cfg Bit 00" =
TRUE 時,如果到達組合性末位,則對輸出執行自鎖定。這種自鎖定可通過輸入參數"AusVR" 進行復位。
如果控制裝置未出現故障控制操作,將在“ 自動”運行模式中訪問“前/后”輸出; Ver_R" 或 "Ver_V" 為 TRUE, "Frg_R" 或 "Frg_V" 為 TRUE 且開關閥 "KE01E" 為 TRUE 。
如果控制裝置未出現故障控制操作,將在“ 手動”運行模式中訪問“前/后”輸出; Ver_R" 或 "Ver_V" 為 TRUE, "SxxR" 或 "SxxV" 為 TRUE 且開關閥 "KE01E" 為 TRUE 。
如果氣缸到達所選最終位置,則給出 "UPxxV/UPxxR" 輸出。在末位位置時,通過 UP 變頻器的控制功能,氣缸將保持在氣動自鎖狀態。
錯誤監控
在故障監控期間,會為報警系統準備相關數據;會訪問消息塊;會生成純文本的錯誤消息。該模塊按照字節掩碼訪問所有的末位位置。通過選擇 AND-, OR- 或 XOR 連接,檢測丟失的末位位置。可從該信息生成故障字節,利用其中相應位標識不正確的末位位置。發送給報告系統的故障字符串中的故障字節將會被更改,從而使每一個故障位表示故障字符串中的一個字符 (a-h) 。該故障字符串將添加到當前故障消息中。
編輯:jq
-
PM
+關注
關注
0文章
32瀏覽量
24284
原文標題:FB420的用法-專用于PM277控制屏的夾具功能塊
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
TLV277x-EP,TLV277xA-EP運算放大器數據表

專用集成電路包括什么和什么兩種 專用集成電路包括什么功能設備

AWTK 開源串口屏開發(10) - 告警信息的高級用法

TC277如何接收AD芯片采樣數據?
loop指令的用法及功能


西門子博途示例:設置優化塊訪問

AWTK 開源串口屏開發(6) - 定時器的用法
AWTK 串口屏開發(5) - MCU端 SDK 用法

西門子博途: 功能塊、組織塊介紹-從設備上傳






 工商網監
工商網監
評論