") 一套高性能高靈活性的硬編解碼推理技術(shù)方案
一套高性能高靈活性的硬編解碼推理技術(shù)方案
在基于NVIDIA平臺(tái)上推理時(shí),通常會(huì)遇到讀取視頻進(jìn)行解碼然后輸入到GPU進(jìn)行推理的需求。視頻一般以RTMP/RTSP的流媒體,文件等形式出現(xiàn)。解碼通常有VideoCapture/FFmpeg/GStreamer等選擇,推理一般選擇TensorRT。
NVIDIA已經(jīng)為用戶提供了基于GStreamer插件拼裝的DeepStream Toolkit來(lái)解決上述需求,實(shí)現(xiàn)RTMP/RTSP/FileSystem到GStreamer再到TensorRT,從視頻數(shù)據(jù)的輸入到高性能解碼推理,再到渲染編碼,直到最終結(jié)果輸出。端到端的屏蔽了細(xì)節(jié),易于上手使用,用戶只需要開(kāi)發(fā)對(duì)應(yīng)GStreamer插件即可輕易實(shí)現(xiàn)高性能解碼推理。這個(gè)方案涵蓋了服務(wù)端GPU、邊緣端嵌入式設(shè)備的高性能支持。 由于項(xiàng)目的緣故,面臨了大規(guī)模(96路)視頻文件的同時(shí)處理,同時(shí)推理的模型種類有6種(Object Detection[Anchor base/Anchor free]、Instance Segmentation、Semantic Segmentation、Keypoint Detection、Classification),處理的模型約96個(gè)(分類器36個(gè),檢測(cè)分割60個(gè))。項(xiàng)目需要極高的靈活度(模型種類和數(shù)量增加變化)、穩(wěn)定性和高性能,考察DeepStream后發(fā)現(xiàn)其靈活度無(wú)法滿足需求,因此針對(duì)該需求,使用FFMPEG、NVDEC(CUVID)、CUDA、TensorRT、ThreadPool、Lua等技術(shù)實(shí)現(xiàn)了一套高性能高靈活性的硬編解碼推理技術(shù)方案,高擴(kuò)展性,靈活的性能自動(dòng)調(diào)整,任務(wù)調(diào)度。
解碼器
VideoCapture/FFMPEG/NVDEC
VideoCapture基于FFMPEG,如果單獨(dú)使用FFMPEG則可以做到更細(xì)粒度的性能控制,如果配合NVDEC則需要修改FFMPEG。
其中尤為重要的部分是:
a. 謹(jǐn)慎使用cvtColor,在OpenCV底層,cvtColor函數(shù)是一個(gè)多線程運(yùn)行加速的函數(shù),即使僅僅是CV_BGR2RGB這個(gè)通道交換的操作也如此。他是一個(gè)非常消耗CPU的操作。
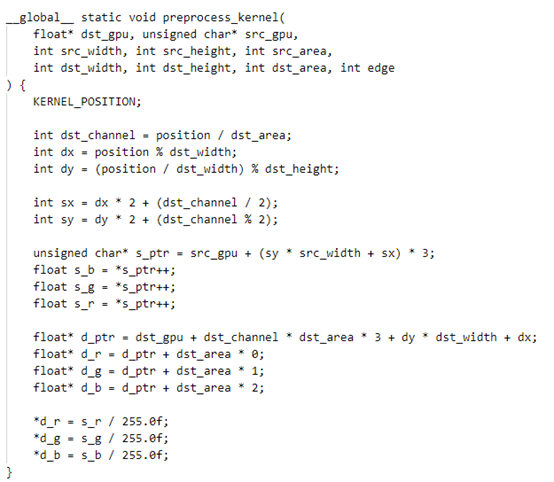
通過(guò)上面可以觀察到,具有64線程的服務(wù)器,也只能實(shí)時(shí)處理3路帶有cvtColor的視頻文件。沒(méi)有cvtColor時(shí),指標(biāo)約為12路。也側(cè)面反映了CPU解碼效率其實(shí)很感人。 而cvtColor在CPU上運(yùn)行的替代方案是sws_scale,具有靈活的性能配置選擇。不過(guò)也僅僅是比cvtColor稍好一點(diǎn),問(wèn)題并沒(méi)有得到解決。 顏色空間轉(zhuǎn)換,第一個(gè)使用場(chǎng)景為H264解碼后得到的是YUV格式圖像,需要轉(zhuǎn)換為BGR(這個(gè)過(guò)程在VideoCapture中默認(rèn)存在sws_scale,輸出圖像為BGR格式)。第二個(gè)使用場(chǎng)景是神經(jīng)網(wǎng)絡(luò)推理所需要的轉(zhuǎn)換(訓(xùn)練時(shí)指定為RGB格式)。 解決方案是: 1) 使用BGR進(jìn)行訓(xùn)練,盡量避免顏色空間轉(zhuǎn)換; 2) 使用FFMPEG解碼,并輸出YUV格式,使用CUDA把YUV格式轉(zhuǎn)換為BGR,同時(shí)還進(jìn)行進(jìn)行標(biāo)準(zhǔn)化、BGRBGRBGR轉(zhuǎn)為BBBGGGRRR等推理常有操作。實(shí)現(xiàn)多個(gè)步驟合并為一個(gè)cuda核,降低數(shù)據(jù)流轉(zhuǎn),提升吞吐量。例如yolov5,則可以把Focus也合并到一個(gè)cuda核中。如果需要中心對(duì)齊等操作,依舊可以把仿射變換矩陣傳入到cuda核中,一次完成整個(gè)預(yù)處理流程。 下圖為同時(shí)實(shí)現(xiàn)歸一化、focus、bgr到rgb、bgrbgrbgr轉(zhuǎn)bbbgggrrr共4個(gè)操作。
b. 僅考慮CPU解碼,使用FFMPEG可以配合nasm編譯(--enable_asm)支持CPU的SIMD流指令集(SSE、AVX、MMX),比默認(rèn)VideoCapture配置的ffmpeg性能更好。同時(shí)還可以根據(jù)需要配置解碼所使用的線程數(shù),控制sws_scale、decode的消耗。
編碼而言,ffmpeg可以使用preset=veryfast實(shí)現(xiàn)更高的速度提升于VideoWriter,設(shè)置合理的gop_size、bit_rate可以實(shí)現(xiàn)更加高效的編碼速度、更小的編碼后文件、以及更快的解碼速度。
c. NVDEC是一個(gè)基于CUDA的GPU硬件解碼器庫(kù),CUVID(NVENC)是編碼庫(kù)。
地址是:https://developer.nvidia.com/nvidia-video-codec-sdk
對(duì)于ffmpeg配合NVDEC時(shí),需要修改libavutil/hwcontext_cuda.c:356 對(duì)于hwctx->cuda_ctx 的創(chuàng)建不能放到ffmpeg內(nèi)部進(jìn)行管理。這對(duì)于大規(guī)模(例如超過(guò)32路同時(shí)創(chuàng)建解碼器時(shí))是個(gè)災(zāi)難。硬件解碼的一個(gè)核心就是CUcontext的管理,CUcontext應(yīng)該在線程池的一個(gè)線程上下文中全局存在一個(gè),而不是重復(fù)創(chuàng)建。TensorRT的模型加載時(shí)(cudaStreamCreate時(shí)),會(huì)在上下文中創(chuàng)建CUcontext,直接與其公用一個(gè)context即可。
對(duì)于沒(méi)有合理管理CUcontext的,異步獲取ffmpeg的輸出數(shù)據(jù)會(huì)存在異常并且難以排查。如果大規(guī)模同時(shí)創(chuàng)建32個(gè)解碼器,則同時(shí)執(zhí)行的程序,其前后最大時(shí)長(zhǎng)差為32秒。并且由于占用GPU顯存,導(dǎo)致程序穩(wěn)定性差,極其容易出現(xiàn)OOM。
frames_ctx->format指定為AV_PIX_FMT_CUDA后,解碼出的圖像數(shù)據(jù)直接在GPU顯存上,格式是YUV_NV12,可以直接在顯卡上對(duì)接后續(xù)的pipline。
在ffmpeg解碼流程中,配合硬件解碼,需要在avcodec_send_packet/avcodec_decode_video2之前,將codec_ctx_->pix_fmt設(shè)置為AV_PIX_FMT_CUDA,該操作每次執(zhí)行都需要存在,并不是全局設(shè)置一次。
基于以上的結(jié)論為:
a) CPU編解碼,使用配置了nasm的ffmpeg進(jìn)行,避免使用VideoCapture/VideoWriter;
b) GPU編解碼,服務(wù)器使用配置了NVDEC的ffmpeg進(jìn)行,嵌入式使用DeepStream(不支持NVDEC);
c) 避免使用cvtColor,盡量合并為一個(gè)cuda kernel減少數(shù)據(jù)扭轉(zhuǎn)實(shí)現(xiàn)多重功能。
CUDA/TensorRT
關(guān)于推理的一些優(yōu)化
a. 對(duì)于圖像預(yù)處理部分,通常有居中對(duì)齊操作:把圖像等比縮放后,圖像中心移動(dòng)到目標(biāo)中心。通常可以使用resize+ROI復(fù)制實(shí)現(xiàn),也可以使用copyMakeBorder等CPU操作。
在這里推薦采用GPU的warpAffine來(lái)替代resize+坐標(biāo)運(yùn)算。原因是warpAffine可以達(dá)到一樣效果,并且代碼邏輯簡(jiǎn)單,而且更加容易實(shí)現(xiàn)框坐標(biāo)反算回圖像尺度。對(duì)于反變換,計(jì)算warpAffine矩陣的逆矩陣即可(使用invertAffineTransform)。GPU的warpAffine實(shí)現(xiàn),也僅僅只需要實(shí)現(xiàn)雙線性插值即可。
b. 注意計(jì)算的密集性問(wèn)題。
cudaStream的使用,將圖像預(yù)處理、模型推理、后處理全部加入到同一個(gè)cudaStream中,使得計(jì)算密集性增加。實(shí)現(xiàn)更好的計(jì)算效率,統(tǒng)一的流進(jìn)行管理。所有的GPU操作均采用Async異步,并盡可能減少主機(jī)到顯存復(fù)制的情況發(fā)生。方案是定義MemoryManager類型,實(shí)現(xiàn)自動(dòng)內(nèi)存管理,在需要GPU內(nèi)存時(shí)檢查GPU是否是最新來(lái)決定是否發(fā)生復(fù)制操作。取自caffe的blob類。
c. 檢測(cè)器通常遇到的sigmoid操作,是一個(gè)可以加速的地方。
例如通常onnx導(dǎo)出后會(huì)增加一個(gè)sigmoid節(jié)點(diǎn),對(duì)數(shù)據(jù)進(jìn)行sigmoid變?yōu)楦怕屎筮M(jìn)行后處理得到結(jié)果。Yolov5為例,我們有BxHxWx [(num_classes + 5) * num_anchor]個(gè)通道需要做sigmoid,假設(shè)B=8,H=80,W=80,num_classes=80,num_anchor=3,則我們有8x80x80x255個(gè)數(shù)字需要進(jìn)行sigmoid。而真實(shí)情況是,我們僅僅只需要保留confidence > threshold的框需要保留。而大于threshold的框一般是很小的比例,例如200個(gè)以內(nèi)。真正需要計(jì)算sigmoid的其實(shí)只有最多200個(gè)。這之間相差65280倍。這個(gè)問(wèn)題適用全部存在類似需求的檢測(cè)器后處理上。 解決對(duì)策為,實(shí)現(xiàn)cuda核時(shí),使用desigmoid threshold為閾值過(guò)濾掉絕大部分不滿足條件的框,僅對(duì)滿足的少量框進(jìn)行后續(xù)計(jì)算。
d. 在cuda核中,避免使用例如1.0,應(yīng)該使用1.0f。
因?yàn)?.0是雙精度浮點(diǎn)數(shù),這會(huì)導(dǎo)致這個(gè)核的計(jì)算使用了雙精度計(jì)算。眾所周知,雙精度性能遠(yuǎn)低于單精度,更低于半精度。
線程池Thread Pool
主要利用了c++11提供的condition_variable、promise、 future、mutex、queue、thread實(shí)現(xiàn)。線程池是整個(gè)系統(tǒng)的基本單元,由于線程池的存在,輕易實(shí)現(xiàn)模型推理的高度并行化異步化。
使用線程池后,任務(wù)通過(guò) commit提交,推理時(shí)序圖為:
當(dāng)線程池配合硬件解碼后,時(shí)序圖為:
此時(shí)實(shí)現(xiàn)了GPU運(yùn)算的連續(xù)化,異步化。GPU與CPU之間沒(méi)有等待。
資源管理的RAII機(jī)制
Resource Acquisition Is Initialization
在C++中,使用RAII機(jī)制封裝后,具有頭文件干凈,依賴簡(jiǎn)單,管理容易等好處。
其要點(diǎn)在于:第一,資源創(chuàng)建即初始化,創(chuàng)建失敗返回空指針;第二,使用shared_ptr自動(dòng)內(nèi)存管理,避免丑陋的create、release,new、delete等操作;第三,使用接口模式,hpp聲明,cpp實(shí)現(xiàn),隱藏細(xì)節(jié)。外界只需要看到必要的部分,不需要知道細(xì)節(jié)。
頭文件:interface.hpp
實(shí)現(xiàn)文件:interface.cpp
責(zé)任編輯:lq
-
gpu
+關(guān)注
關(guān)注
28文章
4702瀏覽量
128710 -
編解碼器
+關(guān)注
關(guān)注
0文章
253瀏覽量
24209 -
流媒體
+關(guān)注
關(guān)注
1文章
192瀏覽量
16649
原文標(biāo)題:實(shí)戰(zhàn) | 硬編解碼技術(shù)的AI應(yīng)用
文章出處:【微信號(hào):kmdian,微信公眾號(hào):深蘭科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
面對(duì)快速迭代的技術(shù),怎能忽視設(shè)備升級(jí)的高效與靈活性?

NVIDIA助力麗蟾科技打造AI訓(xùn)練與推理加速解決方案

使用低成本MSPM0 MCU提高電池管理設(shè)計(jì)的靈活性

使用低成本MSPM0 MCU提高電子溫度計(jì)設(shè)計(jì)的靈活性
使用BQ27Z746實(shí)現(xiàn)反向充電保護(hù)的設(shè)計(jì)靈活性
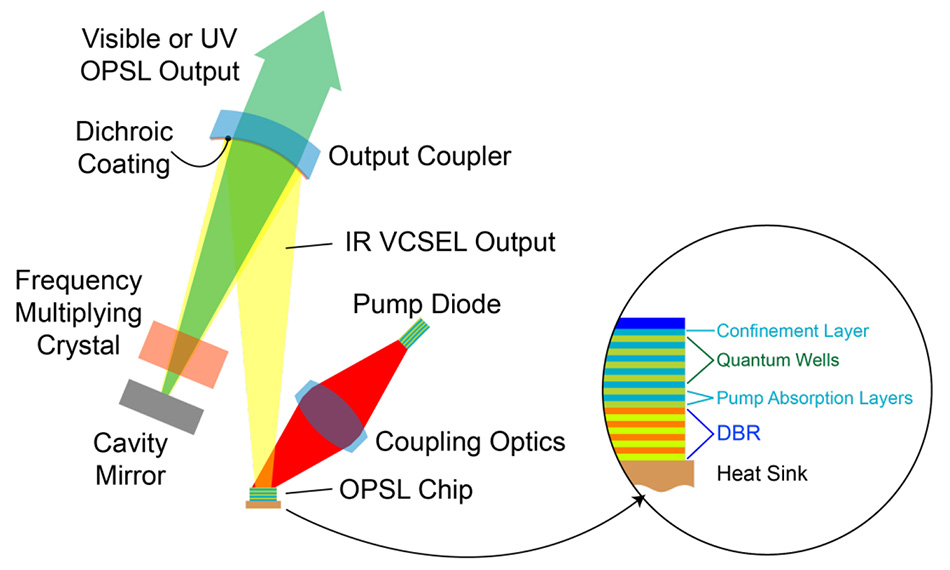
OPSL 優(yōu)勢(shì)1:波長(zhǎng)靈活性
8芯M16公頭如何提升靈活性

英特爾銳炫A系列顯卡為客戶提供了強(qiáng)大的性能和靈活性

意法半導(dǎo)體推出一款兼?zhèn)渲悄芄δ芎驮O(shè)計(jì)靈活性的八路高邊開(kāi)關(guān)
高性能立體聲編解碼器DA7400 數(shù)據(jù)表
編解碼一體機(jī)相對(duì)于傳統(tǒng)的編解碼設(shè)備有哪些優(yōu)勢(shì)?

編解碼一體機(jī):技術(shù)、應(yīng)用與挑戰(zhàn)
音頻處理的新選擇:編解碼一體機(jī)

什么是編解碼一體機(jī)?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論