 基于ATmega8535型單片機和T6963C控制器實現圖形點陣式液晶顯示設計
基于ATmega8535型單片機和T6963C控制器實現圖形點陣式液晶顯示設計
引言
根據顯示方式和內容的不同,常用于儀器儀表上的液晶顯示模塊有筆段型和點陣型兩類。前者可用于顯示有限個簡單符號,控制也較為簡單。后者又可分成兩種:字符型液晶顯示模塊和圖形液晶顯示模塊。點陣液晶顯示模塊顯示的信息多,可顯示字符、漢字,也可以顯示圖形和曲線,且容易與微處理器接口,因此經常用在機械設備控制和自動生產線中顯示設備的工作參數,或者用圖形方式顯示設備和生產線的工作過程。
本文從實際應用角度出發,在簡單介紹了基于T6963C控制器的HY-240128M-201圖形點陣式液晶顯示模塊的組成和工作原理之后,重點闡述此款液晶顯示模塊的使用方法,給出了用ATmega8535型單片機設計軟/硬件的思路和設計要點。
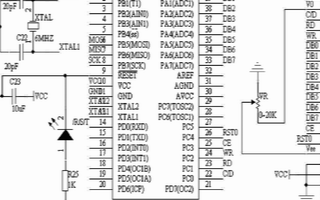
圖1 HY-240128M-201與ATmega8535單片機接口電路圖
液晶顯示模塊簡介
HY-240128M-201是北京博汶迪(BALDWIN)電子技術有限公司推出的240×128點陣液晶顯示模塊。雖然液晶顯示模塊的內部電路工作原理較為復雜,但是顯示模塊只留一個接口與外部通信,LCM可以通過這個接口接收顯示命令和數據,并按照命令和數據的要求進行顯示;外部電路也是通過這個接口讀出顯示模塊的工作狀態和顯示數據的。使用者只需要了解LCM外部引腳的功能和模塊的顯示原理即可。此款LCM提供兩種接口:并行和串行方式傳輸數據命令接口。并行方式采取8位傳輸,即一次傳輸8位命令或數據;而串行方式采用4位數據總線傳輸。為了使液晶顯示模塊有較穩定的顯示,在實際應用中常常采用并行傳輸方式。
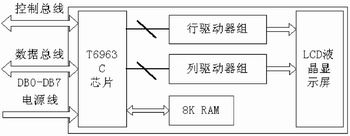
HY-240128M-201液晶顯示模塊主要由1片LCM控制器T6963C、2片行驅動器T6A40、3片列驅動器T6A39、1片8kB的顯示存儲器6264和1塊240×128點陣液晶顯示屏組成。6A40是與T6963C相配套的68路行驅動器,它將來自T6963C的串行信號轉換成并行信號,以驅動液晶顯示屏上相應的行。此模塊有128行點陣,因此用了2片T6A40,其中第2片只用了60路。T6A39是與T6963C配套的80路列驅動器,它將來自T6963C的串行列信號轉換成并行信號,以此驅動液晶顯示屏上相應的列。HY-240128M-201有240列點陣,因此用了3片T6A39。
單片機與液晶顯示模塊的接口和控制
由于T6963C接口適用于8080系列和Z80系列MPU,所以可以直接用8031的/RD、/WR作為液晶顯示模塊的讀、寫控制信號,液晶顯示模塊VDD接+5V電壓,/RESET接RC復位電路。/CE信號可由地址線譯碼產生。C/D信號由地址線中某一個引腳A*提供,A* = 1為指令口地址;A* = 0為數據口地址。間接控制方式則是通過MPU的I/O并行接口,按照模擬模塊時序的方式,間接實現對液晶顯示模塊的控制。這種訪問方式不占用CPU的存儲器空間,它的接口電路與時序無關,其時序完全靠軟件編程實現。
LCM與ATmega8535單片機的接口連接
由于ATmega8535的總線讀寫周期為50ns,是51系列單片機的上百倍。對于此種高速MPU來說,采用間接方式較好,即采用模擬液晶控制器時序的方式與液晶控制器通信。基于間接方法的實用性較強且接口方式簡單,下面給出HY-240128M-201型LCM與AVR系列中ATmega8535型單片機的接口方法,電路如圖1所示。
LCM電源電路
HY-240128M-201需要三種供電電源:邏輯電源、驅動電源和背光電源。其中邏輯電源通過VSS和VDD兩個引腳來提供;驅動電源通過V0和VEE提供;背光電源通過LEDA和LEDK提供。
VSS和LEDK可直接接地,VDD和LEDA接+5V;V0通過電位計接地,VEE接滑動端來調節驅動電壓,當驅動電壓過低時,屏幕無顯示,過高時屏幕全黑。注意電位計的最大阻值應該在10KW-20KW之間。
LCM的復位電路
復位引腳為16-/RST,高電平時為正常狀態,低電平時為復位狀態,它將行、列計數器和顯示寄存器清零。復位電路部分可通過對+5V接4.7KW電阻,對地接4.7μF電容來實現,也可直接與單片機I/O口相連,通過軟件來控制,注意,LCM上電后/RST引腳保持低電平5個時鐘周期才能實現復位。
LCM指令控制接口
HY-240128M-201型LCM外部面板提供了5個命令接口,15引腳(/CE)為使能信號端,低電平有效;4引腳(C/D)為通道選擇信號,1為指令通道,0為數據通道,同時通過控制/RD和/WR的輸入信號可以實現對指令和數據的讀寫。
LCM字體選擇
18引腳FS用于選擇字體,T6963C規定:此引腳為低電平時,字體為8×8點陣形式,反之為8×6點陣形式。注意,此引腳不能懸空,如果所用到的字體是8×8的,則可以將此引腳接地,或者接MPU的I/O引腳并通過軟件來設置顯示字體。
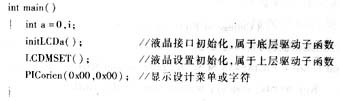
控制軟件設計
軟件采用ICCAVR-C語言開發,它具有很強的軟件控制能力,也就是由主控CPU通過接口向液晶模塊寫入指令來實現模塊控制。程序的設計主要包括兩個部分,一是設計液晶讀寫指令或數據、初始化及清屏等通用子程序,其中,初始化設置主要包括以下幾方面:設置文本顯示緩沖區、圖形顯示緩沖區和CGRAM區各自的首地址和區域寬度,設置LCM工作模式和顯示模式以及選擇光標形狀等。另一部分是漢字和圖形的顯示模塊程序,顯示操作就是將欲顯示的字符或圖形的點陣信息寫入顯示緩沖區中的指定位置。要顯示的內容由初始化中顯示方式設置部分決定,有了通用子程序,就可以構造出各種顯示程序。當采用圖形顯示方式時,與字符、漢字和菜單圖形顯示的原理類似,關鍵在字模庫的建立,在網上可以下載專門的漢字圖形點陣信息提取軟件(如zimo21或Image2Lcd等),它們可以提取8×16或16×16等在匯編或C語言狀態下的點陣信息,以及各種圖片的點陣數據。當采用ATmega8535型單片機控制液晶顯示模塊時,由于是間接訪問方式,所以要對讀/寫操作時序十分了解。
T6963C控制器時序
當數據指令設置位C/D為高,使能位/CE為低,寫狀態位/WR為高,讀狀態位/RD為低時,可以從并行數據口讀取內部控制器的狀態。
當數據指令設置位C/D為高,使能位/CE為低,寫狀態位/WR為低,讀狀態位/RD為高時,可以通過并行數據口向內部控制器寫指令。
當數據指令設置位C/D為低,使能位/CE為低,寫狀態位/WR為低,讀狀態位/RD為高時,可以通過并行數據口向內部控制器寫數據。
設計液晶讀寫指令或數據通用子程序
LCD狀態檢測子函數
在寫數據或寫命令之前,應先檢查LCM的狀態,即狀態寄存器中命令就緒(STA0)和數據就緒(STA1)需要同時檢查,只有這兩位同時為“1”(LCM空閑狀態)時,才可以進行數據和命令的寫操作,通常情況下,可以設計一個讀狀態子函數,用以判斷兩個標志位的空/忙狀態。
顯示字符和圖形的子函數
液晶顯示屏的顯示方式包括文本和圖形顯示。采用圖形顯示方式時,液晶屏顯示信息的管理單位是8×1點陣,稱為一個圖形顯示單位。T6963C按此單位把液晶屏在水平方向上分成20列,垂直方向上分成128行,共20×128個圖形顯示單位,每個圖形顯示單位對應圖形顯示緩沖區中的一個存儲單元。將點陣狀態信息寫入這個存儲單元,則在對應的位置顯示出圖形。采用文本顯示方式時,寫入文本顯示緩沖區的不是點陣狀態信息,而是字符代碼,其點陣狀態信息(8×8) ,即字模存放在CGRAM中。將字符代碼寫入文本顯示緩沖區后,T6963C從CGRAM中取出該字符代碼所對應字符的點陣狀態信息,通過行列驅動器驅動液晶屏顯示該字符。
清屏子函數
在顯示數據前,首先要清除屏幕上次顯示的內容,為此要用到清屏函數,只需向整個屏幕寫入“0”即可實現,具體過程從略。
液晶顯示模塊的調試注意事項
設計電路時的注意事項
HY-240128M-201的液晶驅動電壓高達-19V,一旦錯接在其他引腳上,液晶模塊內的驅動、控制芯片將在短時間內燒毀,所以,在上電前要反復確認各電源線連接正確,最好將驅動電源與液晶模塊通過電位器連接。
要注意復位線電平狀態的正確性。當產品使用環境比較好時,可以直接采用在管腳定義里提供的RC復位電路;但當產品用在比較惡劣的環境時,最好將/RST接到MPU的端口上。
調試注意事項
初次上電前,應慢慢調節電位器,使驅動電源端的輸出調節在0V左右,觀察顯示情況,同時監視液晶驅動電壓,然后慢慢調整至正常工作點。在調節過程中,不要使液晶模塊承受超出最大值的驅動電壓,否則會造成液晶模塊的損壞。如果在低于或大致等于典型驅動電壓時,觀察到了顯示屏上有色調的變化,即顯示域的底色略深于邊緣的顏色,表明液晶模塊電源連接正確,可以進人下一步工作。如果在室溫條件下,調節到超出典型值2-3V時,仍未觀察到顯示屏上有色調的變化,就不必繼續調節了。
HY-240128M-201在虛擬仿真機器人控制系統中的應用
虛擬仿真控制系統用3D-MAX建立排爆機器人和虛擬環境模型,OpenGL繪制仿真環境。通過控制面板上的控件控制仿真環境中的排爆機器人完成各種訓練動作。整個系統集成在一個控制箱內,控制箱包括控制面板、顯示器和集成PC,系統下位機中的主機首先采集控制面板上的模擬數據和數字數據,以將操作面板按鈕的操作轉化為控制指令,然后每50ms通過串口向上位機發送一次命令,上位機收到數據后控制虛擬仿真機器人,最后,上位機收集虛擬機器人的姿態參數,再通過串口傳送到下位機的主機部分,主機通過SPI把數據傳送到從機,從機則用來控制液晶顯示模塊。通過液晶顯示模塊,操作者可以觀測到虛擬機器人的真實姿態值,以此來準確控制機器人的動作,完成預期的任務。
結語
HY-240128M-201型LCM是一款性價比較高的液晶顯示模塊, 該模塊與單片機的接口十分方便,且能進行大信息量的字符顯示,還可以實現圖形及曲線的顯示,這就使人機接口更友好。當然,不同型號的液晶模塊的內置控制器有很多種,各套指令也有一定差異, 但其設計思路和流程基本相同。
責任編輯:gt
-
單片機
+關注
關注
6023文章
44376瀏覽量
628384 -
控制器
+關注
關注
112文章
15885瀏覽量
175368 -
接口
+關注
關注
33文章
8257瀏覽量
149955
發布評論請先 登錄
相關推薦
液晶顯示器的接口和編程技巧
用ATmega8535型單片機設計軟/硬件的思路和設計要點是什么
用ATmega8535型單片機設計軟/硬件的思路和設計要點是什么
T6963C控制器的液晶屏應用及例程
液晶顯示控制器T6963C與單片機的接口及編程
基于ATmega8535型單片機實現圖形點陣式液晶顯示系統的設計
使用單片機實現T6963C液晶中文顯示溫度與時間程序和工程文件
使用單片機實現T6963C液晶顯示的模擬射擊訓練游戲的C語言程序
單片機應用系統設計技術——點陣式圖形液晶顯示器






 工商網監
工商網監
評論