 KUKA的程序調用--VSS版本解析
KUKA的程序調用--VSS版本解析
UP/MAKRO程序調用
該指令可用于調用子程序并將子程序調用鏈接到條件(布爾操作數)。如果需要,可以鏈接多個操作數(最多11個)。
子程序的調用次數沒有限制。
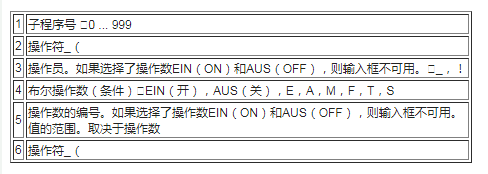
UP101 = F78 + F79 激活條件UP101
;%{SE}%MKUKATPVW %CVW_SPS %VUP %P 2:UP101 = F78 + F79,3:UP
;ENDFOLDSEL_RES=SELECT(#UP,101,$FLAG[78] OR $FLAG[79])
REPEAT UP101 N= 999 STOP= !F298 條件滿足停止循環調用UP101
SEL_RES=SELECT (#CYC_UP,101,TRUE,#NUM,999,#NOT_F,298,FALSE)
;ENDFOLD
;ENDFOLD
DEFFCT INT SELECT
(SUB :IN,NO :IN,CALL_CND :IN,ARI_OP :IN,ARI_NUM :IN,BOOL_OP :IN,BOOL_NUM :IN,MAKRO_ADV :IN)
SUB : 選擇調用的類型UP/makro
NO : 程序號
CALL_CND : 激活條件
ADV_RESULT = 0
IF NOT CALL_CND THEN ---如果不激活就跳步到最后
GOTO PEXIT -----跳步到退出
ENDIF
SWITCH SUB
CASE #UP 使用調用UP
CALLBYSELECT=TRUE
SWITCH NO ;調用UP程序號
CASE 101 ---程序號
UP101( ) 調用UP程序號
CASE 102
UP102( )
CASE 103
UP103( )
CASE 112
UP112( )
CASE 201
UP201( )
CASE 206
UP206( )
DEFAULT
$LOOP_MSG[]=" "
OFFSET = 0
---程序號不能被調用---
SWRITE($LOOP_MSG[],STATE,OFFSET,"UP%D ist nicht vorhanden",NO)
HALT ---程序號不能被調用---使得程序停止
$LOOP_MSG[]=" "
ENDSWITCH
CALLBYSELECT=FALSE
CASE #MAKRO
SWITCH NO ;開始調用MAKRO程序號 --
CASE 0 要激活的程序號
ADV_RESULT= MAKRO0 (MAKRO_ADV) 激活MAKRO0程序
CASE 1
ADV_RESULT= MAKRO1 (MAKRO_ADV) 激活MAKRO1程序
CASE 2
ADV_RESULT= MAKRO2 (MAKRO_ADV)
CASE 3
ADV_RESULT= MAKRO3 (MAKRO_ADV)
CASE 4
ADV_RESULT= MAKRO4 (MAKRO_ADV)
CASE 5
ADV_RESULT= MAKRO5 (MAKRO_ADV)
CASE 6
ADV_RESULT= MAKRO6 (MAKRO_ADV)
CASE 7
ADV_RESULT= MAKRO7 (MAKRO_ADV)
CASE 8
ADV_RESULT= MAKRO8 (MAKRO_ADV)
CASE 9
ADV_RESULT= MAKRO9 (MAKRO_ADV)
CASE 10
ADV_RESULT= MAKRO10 (MAKRO_ADV)
CASE 11
ADV_RESULT= MAKRO11 (MAKRO_ADV)
CASE 12
ADV_RESULT= MAKRO12 (MAKRO_ADV)
CASE 13
ADV_RESULT= MAKRO13 (MAKRO_ADV)
CASE 14
ADV_RESULT= MAKRO14 (MAKRO_ADV)
CASE 15
ADV_RESULT= MAKRO15 (MAKRO_ADV)
CASE 20
ADV_RESULT= MAKRO20 (MAKRO_ADV)
CASE 50
ADV_RESULT= MAKRO50 (MAKRO_ADV)
CASE 57
ADV_RESULT= MAKRO57 (MAKRO_ADV)
CASE 80
ADV_RESULT= MAKRO80 (MAKRO_ADV)
CASE 81
ADV_RESULT= MAKRO81 (MAKRO_ADV)
CASE 82
ADV_RESULT= MAKRO82 (MAKRO_ADV)
CASE 83
ADV_RESULT= MAKRO83 (MAKRO_ADV)
CASE 89
ADV_RESULT= MAKRO89 (MAKRO_ADV)
DEFAULT
$LOOP_MSG[]=" "
-------沒有建立的Makro號被調用
OFFSET = 0
SWRITE($LOOP_MSG[],STATE,OFFSET,"Makro%D ist nicht vorhanden",NO)
用來模擬顯示: 沒有建立的Makro號被調用
HALT -----如果沒有號需要停止
$LOOP_MSG[]=" "
ENDSWITCH 結束了MAKRO選擇
CASE #CYC_UP -----循環執行UP程序
NR=0
WHILE NOT (CHECK_BOOL(BOOL_OP,BOOL_NUM) OR CHECK_ARI(NR,ARI_OP,ARI_NUM)) CHECK_BOOL/ CHECK_ARI啟動功能條件開啟
NR=NR+1 從0開始計數大于給定值將不執行循環程序
CALLBYSELECT=TRUE
SWITCH NO ; UP程序號調用
CASE 101
UP101( )
CASE 102
UP102( )
CASE 103
UP103( )
CASE 112
UP112( )
CASE 201
UP201( )
CASE 206
UP206( )
DEFAULT
$LOOP_MSG[]=" "
UP程序號沒有被激活的程序號
OFFSET = 0
SWRITE($LOOP_MSG[],STATE,OFFSET,"UP%D ist nicht vorhanden",NO)
HALT 程序號沒有使用程序停止
$LOOP_MSG[]=" "
ENDSWITCH
CALLBYSELECT=FALSE
ENDWHILE
CASE #CYC_MAKRO -----循環執行MAKRO程序
NR=0
WHILE NOT (CHECK_BOOL(BOOL_OP,BOOL_NUM) OR CHECK_ARI(NR,ARI_OP,ARI_NUM)) 大于給定值將不執行循環程序
NR=NR+1 從0開始計數大于給定值將不執行循環程序
SWITCH NO -----調用的程序號
CASE 0
ADV_RESULT= MAKRO0 (MAKRO_ADV) 調用執行MAKRO程序
CASE 1
ADV_RESULT= MAKRO1 (MAKRO_ADV)
CASE 2
ADV_RESULT= MAKRO2 (MAKRO_ADV)
CASE 3
ADV_RESULT= MAKRO3 (MAKRO_ADV)
CASE 4
ADV_RESULT= MAKRO4 (MAKRO_ADV)
CASE 5
ADV_RESULT= MAKRO5 (MAKRO_ADV)
CASE 6
ADV_RESULT= MAKRO6 (MAKRO_ADV)
CASE 7
ADV_RESULT= MAKRO7 (MAKRO_ADV)
CASE 8
ADV_RESULT= MAKRO8 (MAKRO_ADV)
CASE 9
ADV_RESULT= MAKRO9 (MAKRO_ADV)
CASE 10
ADV_RESULT= MAKRO10 (MAKRO_ADV)
CASE 11
ADV_RESULT= MAKRO11 (MAKRO_ADV)
CASE 12
ADV_RESULT= MAKRO12 (MAKRO_ADV)
CASE 13
ADV_RESULT= MAKRO13 (MAKRO_ADV)
CASE 14
ADV_RESULT= MAKRO14 (MAKRO_ADV)
CASE 15
ADV_RESULT= MAKRO15 (MAKRO_ADV)
CASE 20
ADV_RESULT= MAKRO20 (MAKRO_ADV)
CASE 50
ADV_RESULT= MAKRO50 (MAKRO_ADV)
CASE 57
ADV_RESULT= MAKRO57 (MAKRO_ADV)
CASE 80
ADV_RESULT= MAKRO80 (MAKRO_ADV)
CASE 81
ADV_RESULT= MAKRO81 (MAKRO_ADV)
CASE 82
ADV_RESULT= MAKRO82 (MAKRO_ADV)
CASE 83
ADV_RESULT= MAKRO83 (MAKRO_ADV)
CASE 89
ADV_RESULT= MAKRO89 (MAKRO_ADV)
DEFAULT
$LOOP_MSG[]=" "
Makro程序號沒有被激活的程序號
OFFSET = 0
SWRITE($LOOP_MSG[],STATE,OFFSET,"Makro%D ist nicht vorhanden",NO)
HALT -----程序號沒有使用程序停止
$LOOP_MSG[]=" "
ENDSWITCH ---結束選擇程序
ENDWHILE ---結束條件
DEFAULT --- 沒有UP,MAKRO,CYC_MAKRO,CYC_UP
ENDSWITCH ---結束選擇程序
PEXIT: -------跳步退出
RETURN ADV_RESULT
ENDFCT
---檢查位用于循環調用---
DEFFCT BOOL CHECK_BOOL(BOOLOP :IN,BOOLOP_NUM :IN)
INT BOOLOP_NUM 位號,數字
DECL BOOL_TYP BOOLOP 各種類型
BOOL STOP_BOOL
SWITCH BOOLOP
CASE #EIN
STOP_BOOL=TRUE ---激活
CASE #AUS
STOP_BOOL=FALSE ---關閉
CASE #E
STOP_BOOL=$IN[BOOLOP_NUM] ---用輸入激活
CASE #NOT_E
STOP_BOOL= NOT $IN[BOOLOP_NUM] ---輸入取反激活
CASE #A
STOP_BOOL=$OUT[BOOLOP_NUM] ---用輸出激活
CASE #NOT_A
STOP_BOOL= NOT $OUT[BOOLOP_NUM] ---用輸出的非激活
CASE #M
STOP_BOOL=$CYCFLAG[BOOLOP_NUM] ---用M量激活
CASE #NOT_M
STOP_BOOL= NOT $CYCFLAG[BOOLOP_NUM] ---用M量的非激活
CASE #F
STOP_BOOL=$FLAG[BOOLOP_NUM] 用F量激活
CASE #NOT_F
STOP_BOOL= NOT $FLAG[BOOLOP_NUM] 用F量的非激活
CASE #T
STOP_BOOL=$TIMER_FLAG[BOOLOP_NUM] 用時間量激活
CASE #NOT_T
STOP_BOOL= NOT $TIMER_FLAG[BOOLOP_NUM] 用時間量的非激活
CASE #S
STOP_BOOL=S[BOOLOP_NUM] S量一般不用
CASE #NOT_S
STOP_BOOL= NOT S[BOOLOP_NUM]
ENDSWITCH
RETURN (STOP_BOOL) 條件滿足反饋
ENDFCT
-----用于輸入數---
DEFFCT BOOL CHECK_ARI(ACT_NR :IN, ARIOP :IN ,ARIOP_NUM :IN)
INT ACT_NR, ARIOP_NUM, MAX_NR
DECL ARI_TYP ARIOP
SWITCH ARIOP
CASE #NUM 直接給入數
MAX_NR=ARIOP_NUM
CASE #COUNT 計數器
MAX_NR=$COUNT_I[ARIOP_NUM]
CASE #BIN 二進制
MAX_NR=$B_OUT[ARIOP_NUM]
CASE #BININ 二進制輸入
MAX_NR=ARIOP_NUM
CASE #ANA 模擬量輸出
MAX_NR=$ANOUT[ARIOP_NUM]*1000
CASE #ANAIN 模擬量輸入
MAX_NR=$ANIN[ARIOP_NUM]*1000
CASE #TIMER 時間控制
MAX_NR=$TIMER[ARIOP_NUM]*0.01
CASE #PROCPAR P值控制
MAX_NR=PROCPAR[ARIOP_NUM]
ENDSWITCH
RETURN (ACT_NR>=MAX_NR) 計數大于給定值.
ENDFCT
;ENDFOLD
;ENDFOLD
編輯:jq
-
plc
+關注
關注
5008文章
13151瀏覽量
462077 -
KUKA
+關注
關注
3文章
217瀏覽量
16490
原文標題:KUKA的程序調用--VSS版本解析
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
記一次JSF異步調用引起的接口可用率降低
RTOS V1.4版本SDK作為TCP Server沒有調用斷開連接的回調函數,為什么?

摩爾線程發布版本號為v250.60.1的Windows驅動程序

安卓版Chrome瀏覽器現已支持第三方密碼管理器調用
STM32H745IIK6器件VDD和VSS短路的原因?
瑞薩Flash示例程序01型SC版本(代碼Flash)應用說明






 工商網監
工商網監
評論