") 基于LPC2220微控制器和嵌入式系統(tǒng)實現數據采集控制系統(tǒng)的設計
基于LPC2220微控制器和嵌入式系統(tǒng)實現數據采集控制系統(tǒng)的設計
引言
隨著計算機技術、電子技術和控制技術的發(fā)展,智能化、自動化、精確化的灌溉和施肥技術正逐漸取代傳統(tǒng)的灌溉方式。在施肥過程中,需要在線檢測肥料溶液的酸堿度和電導率以及灌溉壓力、管道流量等,然后根據這些參數來控制電磁閥和水泵的運行達到自動灌溉施肥的目的。目前,常用的數據采集控制系統(tǒng)都是為某一實際應用而設計的,通用性和可擴展性差、數據存儲能力不足,價格昂貴。因此基于周立功公司的ARM7核心板設計了一種通用的數據采集控制系統(tǒng),并且已經應用到自動灌溉施肥系統(tǒng)中,能夠滿足穩(wěn)定性,實時性以及大容量的數據存儲的要求。該數據采集控制系統(tǒng)采用模塊化設計,可以很方便的擴展和剪裁模塊,同時只要對軟件進行少量修改就可以方便的移植到其它應用系統(tǒng)中。
1 系統(tǒng)總體設計
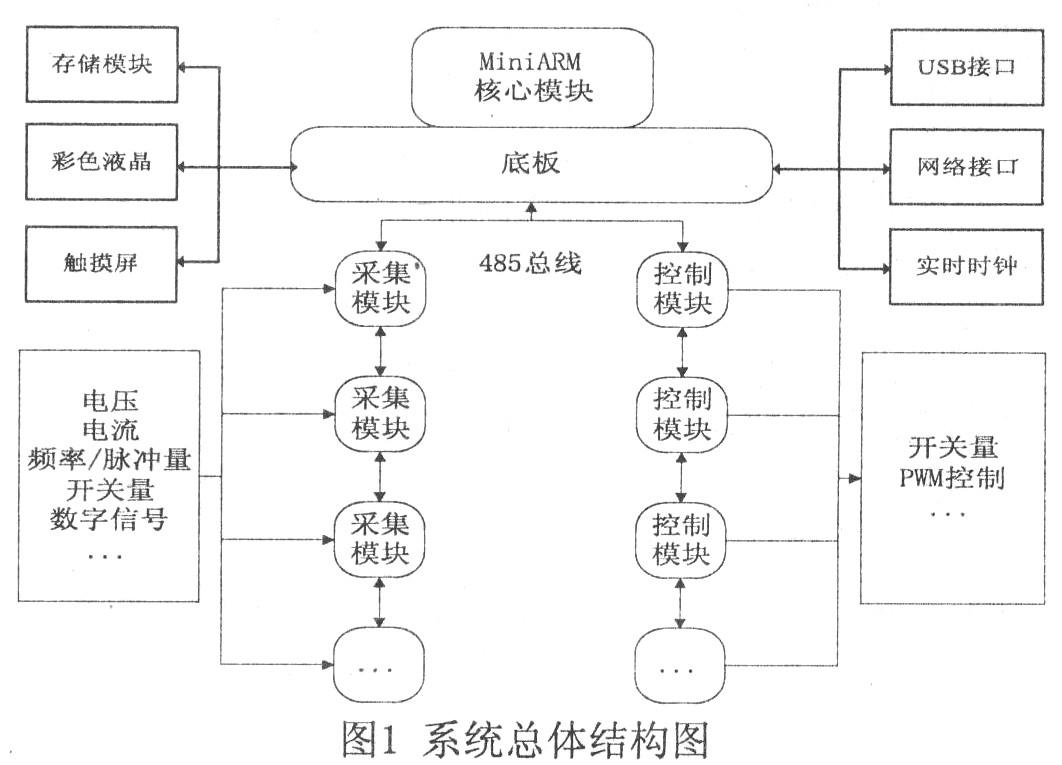
系統(tǒng)總體結構框圖如圖1所示。系統(tǒng)采用LPC2220工業(yè)級ARM7微控制器,內嵌μC/0S—II實時操作系統(tǒng),支持10M以太網(工業(yè)級)、CF卡接口、USB主機控制器、板載電子硬盤FOB(Flash On Board)、A/D轉換、低功耗RTC 等功能。核心模塊與各采集控制模塊之間采用具有光電隔離的RS485通訊接口。基于RS485總線的數據采集控制模塊,可實現對電壓、電流、脈沖/頻率、狀態(tài)量等各種類型信號的采集和開關量控制,以滿足設施環(huán)境內各種傳感器數據的采集和執(zhí)行機構的智能化控制。通過系統(tǒng)硬件擴展和軟件開發(fā),可完整地實現數據采集、存儲、報警、設備控制、智能管理、報表統(tǒng)計等通用功能,滿足各種設施環(huán)境的智能控制與管理。
2 硬件設計
2.1 MiniARM工控模塊
MiniARM工控模塊主要由LPC2220(ARM7TDMI)微控制器、程序存儲器、數據存儲器、工業(yè)級以太網控制器CS8900A、USB Host控制器和NAND F1ash存儲器組成。MiniARM工控模塊接口圖如圖2所示。
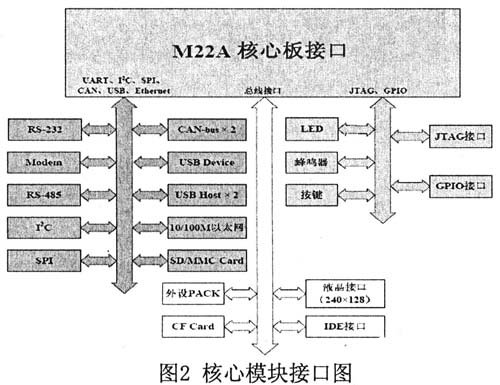
同時工控模塊有256M的板載電子盤,一個標準的外置RTC實時時鐘(PCF8563),2個UART控制器,一路高速I2C總線以及一路高速SPI總線等硬件資源。同時工控模塊內嵌μC/OS—II實時操作系統(tǒng),TCP/IP協議以及FAT32文件管理系統(tǒng)等。工控模塊上的這些軟硬件資源,可以很方便的實現遠程網絡訪問,以及大容量的數據存儲,滿足我們的需要。
2.2.1 數據采集/控制模塊設計
數據采集/控制模塊的設計如圖3所示,具有4個輸入或輸出通道,通過單片機實現數據采集與控制,與核心模塊之間通過RS485總線實現通訊,采用光電隔離技術和內嵌工業(yè)標準的Modbus協議,有效增強通訊穩(wěn)定性,通訊距離可延伸至1200米,總線驅動能力可達128個模塊。
采集控制系統(tǒng)中共設計了三種模塊,模擬量采集模塊、狀態(tài)量/頻率采集模塊以及繼電器輸出控制模塊。每個模塊均以C8051F330單片機為核心。該單片機具有內部A/D和一個串口以及定時器,管腳較少,價格低廉很適合做采集模塊的控制器。在模塊中,C805lF330單片機的串口通過跳線實現復用,通過 NAX3221電平轉換芯片可以實現與PC機的通信,或者通過MAX485E轉換芯片實現RS一485總線通訊。
3 軟件設計
3.1 核心模塊軟件設計
μC/OS—II是個實時操作系統(tǒng)。它是一個完整、可移植、可固化及可剪裁的搶占式多任務內櫳適合小型控制系統(tǒng)具有執(zhí)行效率高、占用空間小等特點。 μC/OS-II系統(tǒng)內核的核心是任務調度機制。μC/OS-II下每個任務可以有休眠、就緒、運行以及中斷等狀態(tài)。μC/OS-II提供的任務間的通信力式有很多,如信號量、消息郵箱、消息隊列和事件標志組等。
核心模塊內嵌μC/OS—II實時操作系統(tǒng),根據數據采集控制系統(tǒng)所需要完成的功能和需求,將系統(tǒng)劃分為5個任務:數據采集控制任務,數據存儲任務,遠程網絡訪問任務,用戶界面任務以及用戶應用程序任務。為了保證系統(tǒng)的實時性,必須合理的設定任務的優(yōu)先級。為了簡化設計,對于運行任務較少的數控系統(tǒng)可以采用靜態(tài)任務優(yōu)先級分配。根據任務對響應時間的敏感程度及重要性,任務的優(yōu)先級次序如下:
用戶應用程序》數據采集控制任務》用戶界面任務》數據存儲任務》遠程網絡訪問任務,每個任務實現一種相對獨立的功能,系統(tǒng)任務流程圖如圖4所示。
數據采集控制任務主要完成數據的采集和對開關量的控制。核心模塊作為主機,采集控制模塊作為從機。主機通過論詢的方式,每隔1秒向從機依次發(fā)送 Modbus讀寄存器命令幀。從機收到命令后,向主機返回采集到的數據。當程序控制邏輯或用戶通過觸摸屏需要開關量動作時,主機向從機發(fā)送寫寄存器命令幀,相應的從機響應并打開或關閉電磁閥。
數據存儲任務主要完成對采集到的數據的存儲。當數據采集控制任務完成一次數據采集任務之后,數據存儲任務會在電子盤上建立txt文件,并將數據存儲到文件中。當數據存儲任務檢測到有U盤插入時,會將電子盤上的txt文件轉存到U盤,并刪除電子盤上的原文件。
遠程網絡訪問任務主要實現用戶通過網頁瀏覽器實現對數據的查看和對開關的控制。遠程網絡訪問任務一直監(jiān)控有沒有HTTP請求,當有HTTP請求時任務會將數據以HTTP協議發(fā)送給瀏覽器客戶端。用戶對控制模塊的遠程控制是通過提交表單的形式來實現的。
用戶界面任務主要完成用戶與系統(tǒng)的交互。通過大屏幕彩色液晶實時顯示采集到的數據,并且可以顯示數據的實時曲線。用戶以通過觸摸屏可以對系統(tǒng)進行設置和控制。
用戶應用程序任務主要是根據實際系統(tǒng)的要求,提取和處理有用的數據完成一些邏輯控制功能。
3.2 數據采集/控制模塊軟件設計
RS一485標準只是一個物理的通信接口標準,要實現總線監(jiān)控還要在此基礎上建立自己的高層通信協議。Modbus協議是美國可編程控制器供應商 Modicon公司制定的一種工業(yè)通訊協議,現在已經被許多工控廠商所支持,廣泛的應用到只能儀表,總線監(jiān)控等領域。
Modbus協議采用主從結構的通信方式,適用于半雙工的RS一485總線。協議規(guī)定總線上有一個主機,多個從機,每個主機分配唯一的地址。工作時可采用命令/應答的通訊方式,主機向要從機發(fā)出命令幀,地址匹配的從機進行響應,并向主機發(fā)出與命令幀對應的應答幀。Modbus有兩種通信模式:ASCII模式和RTU模式。在相同的情況下,RTU模式比ASCII模式能夠傳送更多的數據,因此在本系統(tǒng)中采用RTU模式。RTU消息幀典型格式如表1所示。
在本采集控制系統(tǒng)中,核心模塊作為主機,各個采集和控制模塊作為從機響應主機發(fā)出的命令幀。當主機發(fā)送Ox03功能碼時,從機會把模擬量的值或者狀態(tài)量/頻率量的值返回給主機。當主機發(fā)送0x16功能碼時,會使控制模塊開關量通斷,并且控制模塊會返回當前的狀態(tài)。每個數據采集/控制模塊有4路輸入或輸出通道。因此在每個采集/控制模塊內部定義了4個寄存器,每個寄存器占兩個字節(jié)。采集/控制模塊按字節(jié)接收數據,每接收一個字節(jié)就進入一次串口中斷。進入串口中斷之后,對接收到的數據進行解析。解析數據的流程圖如圖5所示。首先判斷地址是否與本機地址匹配,地址不匹配則放棄本次接受。地址匹配之后再保存功能碼。當數據幀接收完之后,對接收到的數據進行CRC校驗,并于接收到的CRC校驗碼進行比較。若CRC校驗錯誤,則放棄本次數據。若CRC校驗正確,主程序則根據保存的功能碼,寄存器起始地址以及寄存器個數來響應主機。當功能碼為Ox03時,采集模塊根據接收到寄存器起始地址及寄存器個數將采集到的數據發(fā)送給主機。當功能碼為Oxl6時,控制模塊根據接收到的寄存器值打開或關閉繼電器,并且將繼電器狀態(tài)返回給主機。
4 結束語
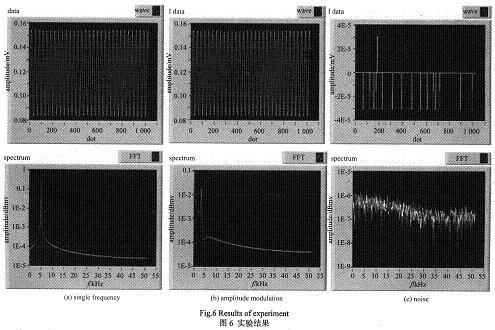
該數據采集控制系統(tǒng)可以對模擬信號、狀態(tài)量以及脈沖量進行采集和處理,并且能夠根據采集的數據來控制繼電器的開關。主機和模塊之間通過RS一485總線以標準的Modbus協議傳輸數據。因此可以很容易的實現擴展和與其它廠商的檢測儀表進行集成。該系統(tǒng)采用了實時操作系統(tǒng),使系統(tǒng)優(yōu)先級明確,提高了實時性,同時實現了大容量的數據存儲和遠程網絡訪問。因此本系統(tǒng)有很好的實用性,已經被我們應用到灌溉施肥控制系統(tǒng)中。
責任編輯:gt
-
微控制器
+關注
關注
48文章
7496瀏覽量
151085 -
控制器
+關注
關注
112文章
16214瀏覽量
177479 -
嵌入式
+關注
關注
5072文章
19026瀏覽量
303517
發(fā)布評論請先 登錄
相關推薦
推薦:AT91RM9200嵌入式核心控制器模塊
基于嵌入式微控制器LPC2214的遠程圖像監(jiān)控系統(tǒng)
基于ARM9微控制器怎么實現上層控制算法?
基于微控制器的現代嵌入式系統(tǒng)
時間觸發(fā)嵌入式系統(tǒng)設計模式(使用8051微控制器開發(fā)可靠應用
基于uCLinux的嵌入式實時遠程數據采集系統(tǒng)
基于M CORE微控制器的嵌入式系統(tǒng)
基于ARM和GPS的數據采集模塊的設計
基于CPLD和嵌入式系統(tǒng)的高速數據采集系統(tǒng)的設計與實現

基于LabVIEW和ARM嵌入式數據采集與遠程傳輸控制系統(tǒng)
基于LPC2220的POS機開發(fā)實例

基于ARM7 LPC2210的觸摸屏觸摸點數據采集系統(tǒng)設計

采用arm7系列處理器的數據采集控制系統(tǒng)的設計方案介紹





 工商網監(jiān)
工商網監(jiān)
評論