 基于FINS/UDP方式實現OMRON PLC與上位機的通信設計
基于FINS/UDP方式實現OMRON PLC與上位機的通信設計
在現代工業自動化控制系統中,可編程邏輯控制器(PLC)作為常用的現場控制設備,上位機作為數據采集及人機界面的一種已經得到廣泛使用。過去,在工程項目開發中,PLC和上位機間的通信常采用RS-232C或者RS-485串行方式,這種方法很難滿足數據量大、通信距離遠、實時性要求高的控制系統。隨著互聯網技術的發展、普及與推廣,以太網技術得到了迅速的發展,其傳輸速率的提高和交換技術的應用,解決了以太網通信的非確定性問題,使得工業以太網能夠廣泛應用于工業信息控制領域,也是工業信息控制未來的發展趨勢。
FINS(factory inteRFace network service)通信協議是歐姆龍公司開發的用于工業自動化控制網絡的指令/響應系統。使用FINS指令可實現各種網絡間的無縫通信,包括用于信息網絡的 Etherne(以太網),用于控制網絡的Controller Link和SYSMAC LINK。通過編程發送FINS指令,上位機或PLC就能夠讀寫另一個PLC數據區的內容,甚至控制其運行狀態,從而簡化了用戶程序。FINS協議支持工業以太網,這就為OMRON PLC與上位機以太網通信的實現提供了可能。
1 OMRON PLC與上位機通信方式
目前,在歐姆龍PLC網絡組成中,上位機和PLC的通信可以采用RS232C/485串行通信、Controller Link通信和工業以太網通信三種方式。它們的主要性能參數如表1所示。
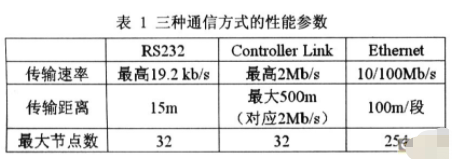
文獻介紹了采用RS232C/485串行通信的方案,其通信速率僅為9600b/s,速率較慢,很難適應現代數據量大、通信距離較遠、實時性要求較高的控制系統。
文獻中給出了基于FINS協議的Controller Link通信的設計方案,其最高速率可以達到2Mb/s,整個網絡的最大傳輸距離為500m,硬件上需要在上位機安裝CLK支持卡,其擴展性及應用的靈活性沒有工業以太網好。
在三種通信方式中,工業以太網的優勢是相當明顯的。其傳輸速率可以達到10/100Mb/s(取決于實際網絡環境);兩個節點之間的傳輸距離可以達到 100m,對于整個網絡的傳輸距離沒有限制;網絡內最大節點數可以達到254個,可以實現1(PLC):N(PC)、N:N、N:1等多種網絡形式。這些都為構架各種規模的工業網絡信息系統提供了有利的條件,具有良好的擴展性、實用性、靈活性。目前使用的上位機都配有以太網卡,所以上位機側無需增加額外的硬件設備。因此,采用工業以太網方式對提高工廠的自動化信息控制水平具有很大的現實意義。
2 以太網FINS通信
在以太網FINS通信中,各種數據信息是以UDP/IP包或者TCP/IP包的方式在以太網上發送和接收的。其中,在Internet層遠程設備使用的是 IP地址,而在應用層使用的則是FINS節點地址。傳輸層中定義了本地UDP或TCP端口號,它為應用層(即FINS通信)提供通信端口,其默認設置為 9600。用戶可以根據實際情況自行修改,但是在同一網絡中,各設備的通信端口號必須保持一致。圖1 FINS以太網通信協議模型
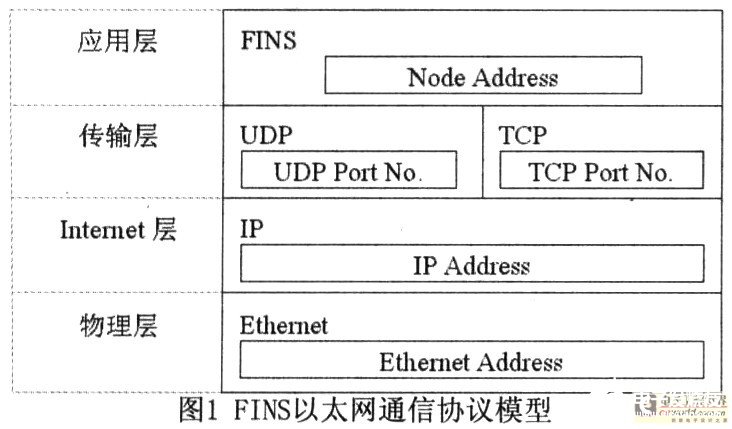
通常以太網通信使用的是IP地址,而在FINS通信中則是使用網絡號、節點號以及單元號來對不同設備(包括PLC、PC等現場設備)進行地址定義的。這就為不同網絡之間各種設備的通信提供了統一的尋址方式。在以太網FINS通信中,歐姆龍的以太網單元一項重要的功能就是能在IP地址和Fins節點地址之間進行轉換,其轉換方式有自動轉換、IP地址表和復合地址表三種方式,其地址轉換數量依據模塊型號和轉換方式的不同還有相應的限制。以太網FINS通信服務是一種基于UDP/IP的通信方式,稱為FINS/UDP方式,歐姆龍相關的以太網產品都支持這種方式。此外,CS1W-ETN21和CJ1W- ETN21以太網通信模塊還支持TCP/IP協議,稱為FINS/TCP方式。
2.1 FINS/UDP方式
FINS/UDP方式是一種使用UDP/IP協議的FINS通信方式。UDP/IP是一種無連接的通信協議。當一條信息從一個節點發到另一個時,這兩個節點是沒有明確連接的對等關系的。UDP協議具有較快的傳輸速度,但是數據通信的可靠性沒有TCP協議高。

如圖2所示,是一個在以太網中發送和接收所使用的UDP幀結構。FINS/UDP方式使用的是一種嵌套格式數據包,即Ethernet報頭、IP報頭、 UDP報頭和FINS幀。一個UDP數據段(FINS 幀)超過1472字節將被分成若干個數據包來傳送。分開的UDP數據將在UDP/IP協議層自動組合。通常不需要關注應用層的數據分段,但是在一個多層 IP網絡中1427字節的UDP包可能無法發送。在這種系統中就需要使用FINS/TCP方式。
2.2 FINS幀結構
FINS 幀分為FINS指令幀和FINS響應幀兩種形式。指令幀在發送FINS指令時使用,響應幀則在接收到FINS指令后對其返回響應時使用。它們都是由一個 FINS報頭(存儲傳輸控制信息)、一個FINS指令域(存儲一個FINS指令)以及一個FINS參數/數據域(存儲指令參數和發送/響應數據)所組成的。響應幀FINS指令域的內容與所接收到的指令幀的FINS指令域相同。具體結構見圖3、圖4。
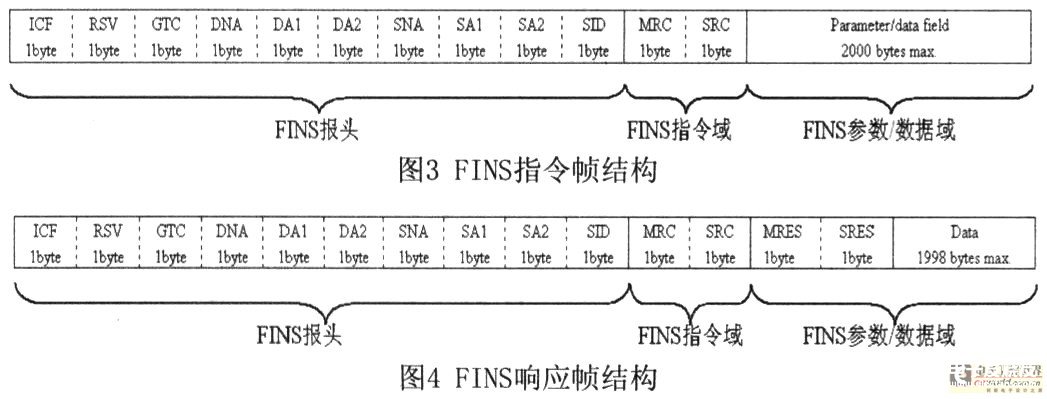
ICF為信息控制域,用于標明指令和響應;RSV為系統保留;GCT為網關允許數目;DNA為目的網絡號;DA1為目的節點號;DA2為目的單元號;SNA為源網絡號;SA1為源節點號;SA2為源單元號;SID為服務和響應的標識號,可任意設置,指令和響應對應相同;MRC和SRC分別為 FINS指令的主指令和從指令;參數/數據域,用于標明所操作的數據地址、范圍等,在響應幀中前兩個字節MRES和SRES構成響應碼,用來診斷錯誤信息。
3 FinsGateway和SYSMAC Compolet控件介紹
FinsGateway是OMRON FINS通信協議的驅動程序,它為計算機上的32位Windows操作系統提供一個工業自動化網絡環境。FinsGateway集成了不同的網絡協議,并為FINS通信和數據鏈接提供驅動程序和接口庫函數。它通過創建高性能的虛擬存儲區EventMemory,為不同的用戶程序提供數據的接入和共享。利用 FinsGateway,計算機可以通過各層網絡(包括網絡互聯)訪問網絡上的PLC,通過接口庫函數,用戶還可以開發程序。
SYSMAC Compolet是歐姆龍公司專門為FINS通信開發的Active X控件,它是架構在FinsGateway這個驅動程序下的VB控件,對Fins指令做了進一步集成和優化。SYSMAC Compolet為SYSMAC C/CS1/CV系列的PLC提供應用程序編程接口,在開發時只需要調用該控件,編寫程序更便捷,語句更簡單,配合使用FinsGateway,通過計算機就可以方便地控制訪問PLC,直接對其操作而不需要掌握相應的Fins指令知識。
4 OMRON PLC與上位機以太網通信的實現
OMRON PLC與上位機的以太網通信依靠發送FINS指令實現。上位機發送FINS指令可以直接讀取或寫入PLC相應的數據,PLC部分無需編寫接收和發送程序。文獻給出了運用VC++異步套接字類CAsyncSocket與OMRON PLC進行以太網通信的方法。本例中采用FINS/UDP方式,具體如圖7所示。上位機利用Visual Basic 6.0進行程序開發,具體實現向PLC發送FINS指令(讀取內存區域,指令代碼0101)讀取DM100開始的150個字數據的功能。相較于文獻 介紹的方法,本文中為不同層次的使用者提供了三種方法來實現這一個功能,增加了系統開發的選擇性。圖7上位機與PLC通過以太網通信
在進行上位機程序編程之前首先要完成上位機和PLC的以太網單元的設置。
(1)設置上位機的IP地址為10.72.18.11,子網掩碼為255.255.255.0,它的FINS節點號默認為11。
(2)通過歐姆龍CX-Programmer軟件,在IO表中將PLC CSIW-ETN11以太網單元的IP地址設置為10.72.18.19,子網掩碼為255.255.255.0,FINS節點號設置為19。地址轉換方式設置為自動生成(動態)。FINS/UDP端口為9600(默認)。保存后下傳至PLC。
下面主要介紹三種方法來實現上述功能。
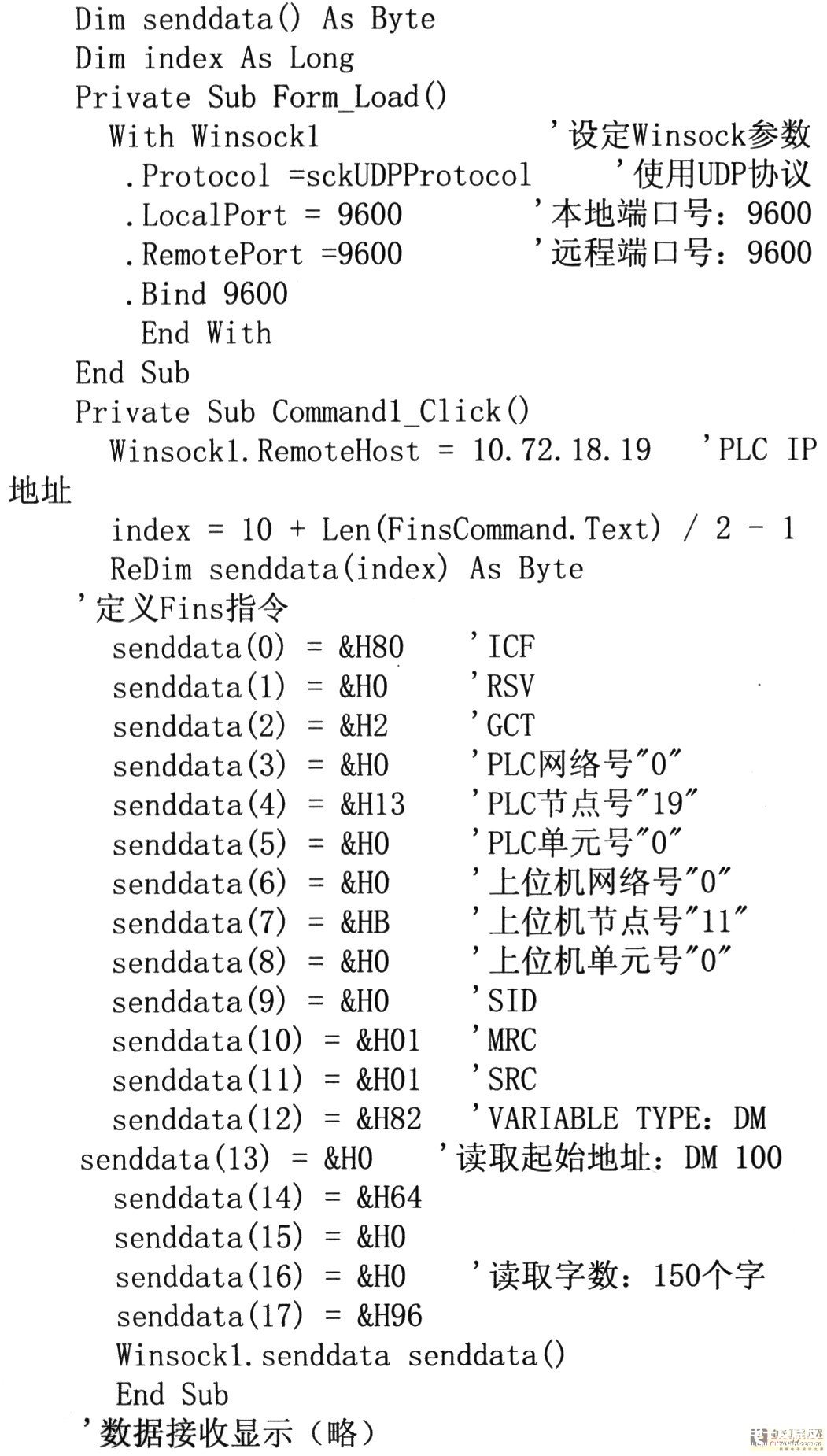
4.1 使用Micosoft Wi nsock控件
在VB中新建一個Standard.EXE文件。添加Winsock控件,對象命名為“Winsock1”,發送Fins命令程序如下:
編譯保存后即可。
4.2 使用FINSGateway中的OMRON FinsMessaging Control
(1)在上位機中安裝Finsgateway軟件,并在Service Manager中啟動CPU_UNIT和ETN_UNIT。
(2)ETN UNIT屬性中,在“UDP Nodes”中手動添加PLC的IP地址(10.72.18.19)和FINS地址(0.19.0)。在“Commuincation Unit Settings”中設置端口號(9600)和FINS-IP地址轉換方式為自動生成(動態)。
(3)在VB中新建一個standard.EXE文件。添加OMRON FinsGateway FinsMessaging Control,對象名為“FinsMsgl”。
(4)在form區添加一個Command button(命名為“Command1”)作為發送Fins指令之用;同時添加一個textbox(命名為“Text1”)作為顯示所接受數據之用。
(5)在“Conmand1”中的“Click”事件中添加如下代碼:
Private Sub Command1_C1ick()FinsMsg1.sendFinsCommand0,19,0,“0101820064000096”End Sub
在“FinsMsg1”中的“OnReceive”事件中添加如下代碼:
Private Sub FinsMsg1_OnReceive ()
Dim net As Integer,node As Integer,unit AsInteger
Text1.Text=Fins Msg1.receive Message(net,node,unit,vbString)
End Sub
編譯保存后即可。
4.3 使用FinsGateway和SYSMAC Compolet
(1)在上位機中安裝Fins Gateway和SYSMACCompolet軟件。啟動FinsGateway的Service Manager,并啟動CPU UNIT和ETN UNIT。
(2)同4.2中第(2)點。
(3)在VB中新建一個Standard.EXE文件。添加OMRON SYSMAC CS Control,對象名為“SYSMAC CS11”。
(4)在對象“SYSMACCS11”屬性中,選擇“Communication”標簽,選中“ActivateCoCommunication”并設置PLC的Fins地址(0.19.0)。
(5)在form區添加一個Command button(命名為“Command1”)作為發送Fins指令之用;同時添加一個text box(命名為“Text1”)作為顯示所接受數據之用。
(6)在“Conmand1”中的“Click”事件中添加如下代碼:
Private Sub Command1_Click()
Text1.Text=SYSMAC_CS1 1.readArea(plcAreaDM,100,150,vbString)
End Sub
編譯保存后即可。
5 結束語
工業以太網作為工業現場信息采集的重要網絡具有速率高、通信距離遠、抗干擾性好等特點,已經得到廣泛應用。本文所介紹的三種OMRON PLC與上位機以太網通信的方法均在實際工程中驗證成功。這三種方法從本質上來說其實是一樣的,但具體使用和實現過程有所不同。第一種方法不需要另外購置歐姆龍相關軟件,但需要對FINS通信底層協議以及Fins幀結構及其封裝過程有比較全面的了解,程序編寫較為復雜,適用于有一定開發經驗的高級用戶。第二種方法需要掌握Fin s幀結構以及FinsGateway的相關配置,但是對發送指令和接收數據的程序編寫較為簡單,適用于中級用戶。在第三種方法中,使用了SYSMAC Compolet中簡單易懂的編程語言,即可完成上位機的程序開發,整個程序編寫過程簡單明了,可以大幅縮減通信程序的開發時間,適用于那些開發經驗較少的初級用戶。后面兩種方法需要另外購置歐姆龍軟件,這是在程序開發時需要注意的。這三種方法都可利用工業以太網實現OMRON PLC與上位機的通信,具有實時性好、速度快、可靠性高、運行穩定等優點。在PLC控制系統中采用以太網單元通信后,使工業自動化與生產管理自動化有機地結合到了一起,簡化了系統設計。
責任編輯:gt
-
控制系統
+關注
關注
41文章
6417瀏覽量
110092 -
以太網
+關注
關注
40文章
5287瀏覽量
169620 -
plc
+關注
關注
5001文章
12935瀏覽量
459179
發布評論請先 登錄
相關推薦
利用VC++6.0實現上位機與PLC的串行通信

OMRON PLC在以太網中的通信及實現

PLC上位機通信系統的實現(VB編寫)

FINS通信協議實現OMRON PLC與上位機的以太網通信設計方案
S7系列PLC上位機通信及PRODAVE軟件包在上位機中的使用資料說明
上位機發送FINS UDP命令讀寫PLC數據
C#使用歐姆龍PLC的Fins協議讀寫PLC地址(基本封裝)

TCP通信UDP通信串口通信C#上位機





 工商網監
工商網監
評論