") 基于PLC實(shí)現(xiàn)PID控制器的改進(jìn)設(shè)計(jì)
基于PLC實(shí)現(xiàn)PID控制器的改進(jìn)設(shè)計(jì)
在工業(yè)生產(chǎn)中,常需要采用閉環(huán)控制方式來(lái)控制溫度、壓力、流量等連續(xù)變化的模擬量。無(wú)論是使用模擬控制器的模擬控制系統(tǒng),還是使用計(jì)算機(jī)的數(shù)字控制系統(tǒng),PID控制器都得到了廣泛的應(yīng)用。這是因?yàn)檫@種方法不需要精確的控制系統(tǒng)數(shù)學(xué)模型,有較強(qiáng)的靈活性和適應(yīng)性。但是在數(shù)字PLC控制系統(tǒng)中,普通的 PID算法對(duì)所有過(guò)去狀態(tài)存在依賴性,從而引起系統(tǒng)較大的超調(diào),使系統(tǒng)穩(wěn)定性下降。增量式PID控制算法每次輸出只輸出控制增量,必要時(shí)可通過(guò)邏輯判斷限制故障時(shí)的輸出,從而降低了因機(jī)器故障導(dǎo)致PID誤輸出給系統(tǒng)帶來(lái)嚴(yán)重后果的影響。
在實(shí)際系統(tǒng)中,PLC控制模擬量可采用PLC自帶的PID過(guò)程控制模塊,但對(duì)要求比較高的場(chǎng)合采用改進(jìn)的PID控制算法,就必須由用戶自己編制PID控制算法,基于這些問(wèn)題的考慮,文中介紹一種由三菱FX2N實(shí)現(xiàn)的增量式PID控制器的設(shè)計(jì)方法。
1 控制原理
1.1 PID控制原理
PLC的PID控制器的設(shè)計(jì)是以連續(xù)系統(tǒng)的PID控制規(guī)律為基礎(chǔ),將其數(shù)字化,寫成離散形式的PID控制方程,再根據(jù)離散方程進(jìn)行控制程序設(shè)計(jì)。
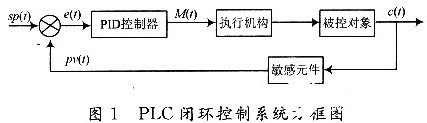
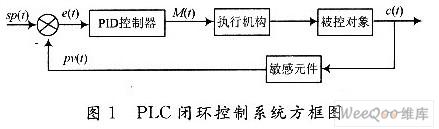
在連續(xù)系統(tǒng)中,典型的PID閉環(huán)控制系統(tǒng)如圖1所示,圖中sp(t)是給定值,pv(t)為反饋量,c(t)為系統(tǒng)的輸出量。
PID控制器的輸入/輸出關(guān)系式為:

式中:M(t)為控制器的輸出;M0為輸出的初始值;e(t)=sp(t)-pv(t)為誤差信號(hào);Kc為比例系數(shù);T1為積分時(shí)間常數(shù);TD為微分時(shí)間常數(shù)。
式(1)中等號(hào)右邊前3項(xiàng)分別是比例、積分、微分部分,他們分別與誤差、誤差的積分和微分成正比。假設(shè)采樣周期為Ts,系統(tǒng)開(kāi)始運(yùn)行的時(shí)刻為t=0,用矩形積分來(lái)近似精確積分,用差分近似精確微分,將式(1)離散化,第n次采樣時(shí)控制器的輸出為:

式中:en-1為第n-1次采樣時(shí)的誤差值;K1為積分系數(shù);KD為微分系數(shù)。
由式(2)可知,控制器輸出的第二項(xiàng)是誤差積累的結(jié)果,會(huì)使得超調(diào)量過(guò)大,而這些在有些工業(yè)過(guò)程中是不允許的。所以常規(guī)PID控制算法很難控制這類過(guò)程。
1.2 增量式PID控制規(guī)律
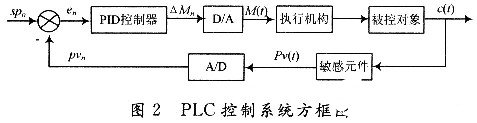
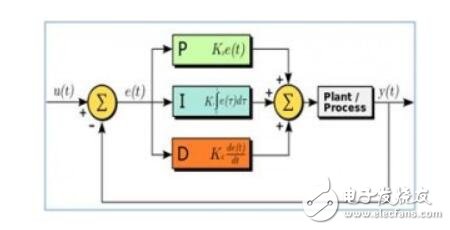
增量式PID的結(jié)構(gòu)框圖如圖2所示:
由式(2)的表達(dá)式,就可以根據(jù)“遞推原理”得到Mn-1的表達(dá)式:
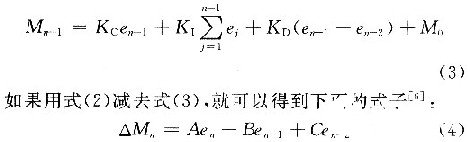
式中:A=KC+KI+KD;B=KC+2KD;C=KD。A,B,C都是與采樣周期、比例系數(shù)、積分時(shí)間常數(shù)、微分時(shí)間常數(shù)有關(guān)的常數(shù)。
由式(4)可知,增量式PID算法建立在對(duì)普通PID算法進(jìn)行改進(jìn)的基礎(chǔ)之上。它克服了位置式PID對(duì)所有過(guò)去狀態(tài)的依賴,計(jì)算機(jī)控制器輸出的只是增量,所以誤動(dòng)作的時(shí)候?qū)敵龅挠绊懕容^小,必要的時(shí)候可以使用邏輯判斷的方法將這種影響消除,因而不會(huì)嚴(yán)重影響系統(tǒng)的工況。由于算式中不需要對(duì)誤差進(jìn)行累加,控制增量△Mn的確定僅與最近的n,n-1,n-2次的采樣值有關(guān),較容易的通過(guò)加權(quán)處理而獲得比較好的控制效果。
2 PLC軟件設(shè)計(jì)
2.1 程序流程
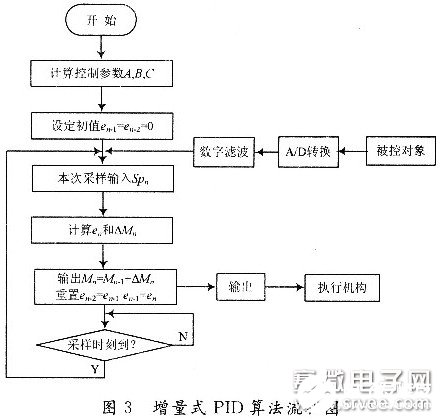
圖3給出了增量式PID控制算法的程序流程框圖。在進(jìn)行初始化時(shí),應(yīng)根據(jù)系統(tǒng)性能要求選定參數(shù)KC,KI,KD和采樣時(shí)間TS,從而確定系數(shù)A,B,C,并設(shè)置偏差初值en-1=en-2=0。
2.2 控制算法的參數(shù)確定
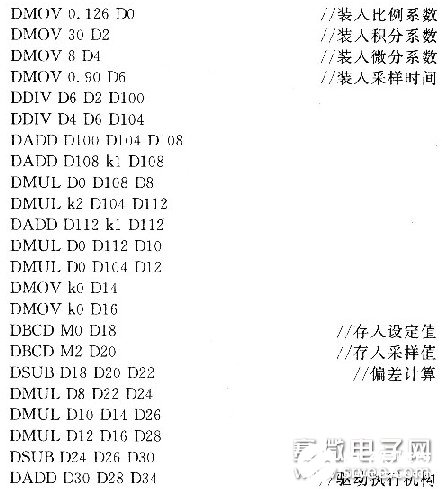
參數(shù)整定是控制系統(tǒng)設(shè)計(jì)的核心內(nèi)容。它是根據(jù)被控過(guò)程的特性確定PID控器的比例系數(shù)、積分時(shí)間和微分時(shí)間的大小,以改善系統(tǒng)的動(dòng)態(tài)特性和靜態(tài)特性,取得最佳控制效果。本文采用臨界比例度法。假設(shè)選取的控制度為1.05,根據(jù)經(jīng)驗(yàn)選取臨界比例度Kr=20%,臨界振蕩周期Tr=60 s,得參數(shù)整定初始值TS=O.90 s,KC=O.126,TI=30 s,TD=8 s。
基于三菱FX2NPLC的部分程序如下:
3 結(jié)語(yǔ)
該文在分析普通PID控制算法的基礎(chǔ)上,提出了增量式PID算法的控制原理,通過(guò)了自編程序在三菱FX2NPLC上實(shí)現(xiàn)了改進(jìn)的PID算法。由實(shí)際模型的驗(yàn)證結(jié)果表明,此方法可以有效地減少系統(tǒng)的超調(diào)量,使其得到更好的控制效果,因此在實(shí)際的工程應(yīng)用中具有較好的借鑒作用。
責(zé)任編輯:gt
-
控制器
+關(guān)注
關(guān)注
112文章
16214瀏覽量
177479 -
plc
+關(guān)注
關(guān)注
5008文章
13167瀏覽量
462193 -
PID
+關(guān)注
關(guān)注
35文章
1471瀏覽量
85306
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
基于FPGA的模糊PID控制器的設(shè)計(jì)實(shí)現(xiàn)
基于MBP算法的PID控制器設(shè)計(jì)
基于PLC的神經(jīng)網(wǎng)絡(luò)PID控制器設(shè)計(jì)
基于FPGA實(shí)現(xiàn)PID控制器的研究
pid控制器原理

基于BP神經(jīng)網(wǎng)絡(luò)的PID控制器的研究與實(shí)現(xiàn)

直流調(diào)速系統(tǒng)的模糊PID控制器設(shè)計(jì)實(shí)現(xiàn)
快速浮_定點(diǎn)PID控制器FPGA的研究與實(shí)現(xiàn)
pid控制器的輸入輸出_PID控制器的控制實(shí)現(xiàn)
在三菱FX2NPLC上實(shí)現(xiàn)了增量式PID算法的控制
pid控制器工作原理





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論