 關于電渦流式鈔票厚度檢測傳感器的原理及設計
關于電渦流式鈔票厚度檢測傳感器的原理及設計
摘要:在ATM機和紙幣清分機中,鈔票的厚度檢測是必須的功能,通過鈔票的厚度特征可以識別鈔票上粘貼的膠帶和折角等,從而剔除不合格鈔票。本文論述了一種電渦流式鈔票厚度檢測傳感器,采用并列的結構相同的多路厚度傳感器,通過每路獨立的厚度傳感器檢測出來的信號,拼接成整張鈔票的厚度特征,從而識別鈔票是否有異常。本傳感器具有電路簡單、成本低、檢測范圍大等優點。
0 前言
電渦流厚度檢測具有成本低、線性范圍大等優點。通過選擇合適的頻率點和被測金屬材料,可用于檢測金屬材料的位移。通過機械結構把鈔票厚度轉換成金屬材料位移的變化,可以用于測量鈔票厚度。
在ATM機和紙幣清分機中,鈔票的厚度檢測是必需的功能,通過鈔票的厚度特征可以識別鈔票上粘貼的膠帶和折角等,從而剔除不合格鈔票。由于膠帶可能粘貼在鈔票上的任何位置,所以厚度檢測必須能夠覆蓋整張鈔票的范圍,需要設置緊密排列的多路厚度傳感器,每路厚度傳感器的結構相同,檢測原理也相同。通過多路獨立的厚度傳感器檢測出來的信號,拼接成整張鈔票的厚度特征,從而識別鈔票厚度是否有異常。
1 電路原理
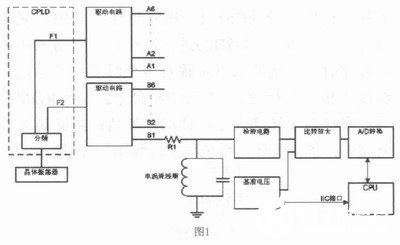
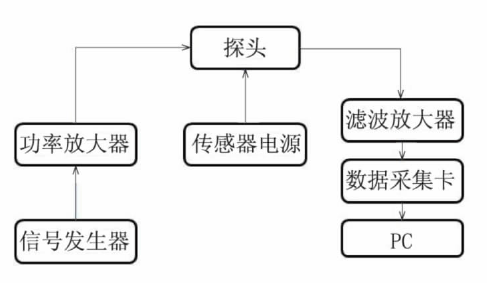
原理框圖如圖1所示,由晶體振蕩器、CPLD、驅動電路、電渦流諧振電路、檢波電路、比較放大、基準電壓產生、A/D轉換器、CPU等部分組成。
1.1 晶體振蕩器
采用有源晶振,提供穩定的頻率給電渦流線圈作為激勵源,系統的頻率穩定性取決于此晶振。
1.2 CPLD
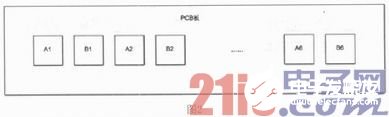
晶體振蕩器產生的振蕩信號輸入CPLD,經過CPLD分頻后,輸出2個不同頻率的信號到驅動電路,再輸出到電渦流線圈。共有12路電渦流線圈,分別是A1~A6、B1~B6,A和B的工作頻率不同,A和B在PCB板上交替排列,防止互相干擾,如圖2所示。
1.3 輸出驅動電路
用于提高CPLD輸出信號的驅動能力,驅動電渦流線圈工作。
1.4 電渦流諧振電路
由電渦流線圈和諧振電容組成。應該諧振在工作頻率的附近。
1.5 檢波電路
負責檢出經過諧振電路分壓后的高頻信號包絡。
1.6 比較放大
把檢波輸出電壓和基準電壓相減后放大輸出,以得到較高的分辨力,輸出到A/D。
1.7 基準電壓產生
每路傳感器的基準電壓可通過IIC接口調節,用于和檢波輸出電壓相減,以補償結構或電路的差異造成檢波輸出電壓的不一致。
1.8 A/D轉換器
用于把放大輸出的傳感器模擬信號轉換為數字信號,采樣速率和采樣時間受CPU控制。
1.9 CPU
控制A/D轉換器進行傳感器信號采集、非線性修正等。
2 厚度傳感器結構原理
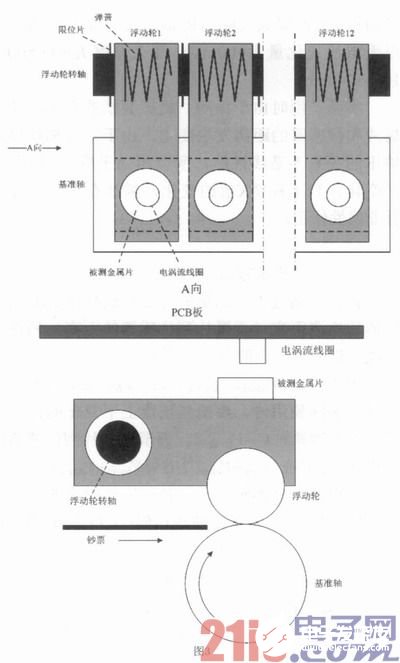
厚度傳感器的機械結構原理如圖3所示,由1條基準軸和12個浮動輪構成。基準軸固定在兩側框架上,要求旋轉起來圓周的跳動盡可能小。浮動輪圍繞著轉軸上下運動,被測金屬片固定在浮動輪上,隨浮動輪一起上下運動。電渦流線圈固定在電路板上,位置固定不變。彈簧負責給浮動輪施加壓力,使浮動輪緊貼基準軸。限位片用于防止浮動輪橫向移動。基準軸和浮動輪緊貼在一起旋轉,鈔票經過兩個輪子之間時,浮動輪會被頂起,造成被測金屬片和電渦流線圈距離發生變化,通過檢測頂起的高度,可以得知鈔票的厚度情況。
3 厚度測量方法
首先需要厚度自校準,相當于自學習的過程。先讓厚度組件空轉,測得傳感器輸出電壓,稱為零值電壓,然后使用1張標準厚度的測試鈔票,稱為校準鈔,以正常速度通過厚度組件,測得傳感器輸出電壓,此電壓減去零值電壓,得到電壓變化量,然后轉換成100 μm厚度對應的傳感器輸出電壓變化量,即為K值。比如校準鈔的厚度為110 μm,對應的電壓變化量為550mV,則100 μm的電壓變化量為100/110×550= 500mV,即K值為500mV。假設厚度組件是穩定的,那么其K值應該恒定不變,后續的測量可以此為基準。
正常點鈔時厚度檢測,每次點鈔前都會讓厚度組件空轉,先測得零值電壓,然后開始點鈔,用測得的鈔票厚度電壓減去零值電壓,得到的電壓變化量通過K值換算成實際的鈔票厚度。即如果測得的厚度電壓變化量為600mV,那么厚度為600/500×100=120 μm。
實際使用時由于振動、機械磨損的影響,使金屬片和傳感器的距離發生變化,由于距離和傳感器輸出的關系不是線性的,所以相當于厚度K值發生了變化,為了補償K值的變化,需要在使用前先進行非線性修正。
4 非線性修正方法
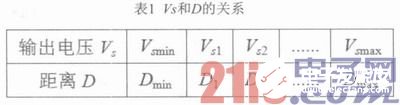
首先,通過人工測量的方法得到傳感器輸出電壓VS和檢測距離(金屬片到傳感器的距離)的關系曲線。設基準電壓的調節范圍為Vbmin~Vbmax,Vo的變化范圍為Vomin~Vomax,且Vo=(Vs-Vb×G,G為放大倍數。實際使用時,要給Vo預留上下變化的范圍,要求沒有鈔票時Vo= Vomax/2。調節金屬片到傳感器的距離D,使Vs在Vbmin+Vomax/2/G到Vbmin+Vomax/2/G之間變化,得到傳感器輸出電壓Vs和檢測距離的關系曲線,如圖4所示。該關系曲線存儲在CPU的非易失存儲器中。該關系如表1所示。
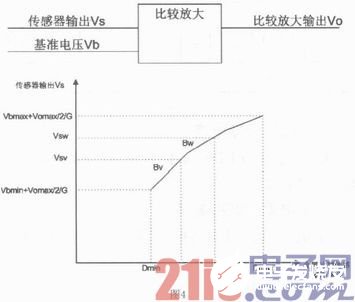
實際測量前,先對厚度組件進行校準,得到當前工作點的K值Kw。然后CPU根據當前基準電壓Vb和比較放大輸出Vo的值,可以計算出當前Vs值Vsw=Vo/G+Vb,CPU通過查找內部存儲的關系曲線,計算出Vsw點的斜率Bw。假設Vsw處于Vs1和Vs2之間,那么Bw=(Vs2-Vs1)/(D2-D1)。
實際測量時,同樣根據基準電壓Vb和比較放大輸出Vo的值,可以得出當前的Vs值Vsv。查表計算出Vsv點的斜率Bv,那么當前的K值Kv=Bv ×Kw/Bw。即實現對K值的非線性修正。
5 結束語
該傳感器通過引入CPLD分頻,采用門電路驅動等方法,拋棄了復雜的高頻振蕩電路和功率放大電路,具有穩定性好、電路簡單、成本低等優點。采用特別的非線性修正方法和校準方法,具有機械誤差容忍度好、檢測范圍大等優點,可以適用于ATM機和紙幣清分機等要求小體積、低成本的場合。
編輯:lyn
-
cpld
+關注
關注
32文章
1247瀏覽量
169212 -
晶體振蕩器
+關注
關注
9文章
616瀏覽量
29058 -
電渦流式傳感器
+關注
關注
0文章
8瀏覽量
10694
發布評論請先 登錄
相關推薦



渦流傳感器測厚度的原理是什么
渦流傳感器屬于什么傳感器
渦流式傳感器的主要優點是什么
電渦流位移傳感器的量程與哪些因素有關
電渦流位移傳感器的測量原理是什么
電渦流傳感器的工作原理、類型及性能指標

安泰ATA-4014高壓功率放大器在傳感器脈沖渦流檢測中的應用





 工商網監
工商網監
評論