 基于Motorola HSC12系列16位MCU實現汽車ABS/ASR集成系統的設計
基于Motorola HSC12系列16位MCU實現汽車ABS/ASR集成系統的設計
作者:崔海峰 , 齊志權 , 王仁廣
汽車驅動防滑系統(Anti-slip Regulation System,簡稱ASR)是在汽車制動防抱死系統(Antilock Braking System,簡稱ABS)的基礎上發展起來的。在裝備了ABS的汽車上添加發動機輸出力矩的調節功能和驅動輪制動壓力的調節功能后,ABS所用的車輪轉速傳感器和壓力調節器可全部為ASR所利用。ASR和ABS在算法上很相似,許多程序模塊可以通用,因而在實際應用中可以把兩者集成在一個控制器中,組成ABS/ASR集成系統。
1 轎車ABS/ASR集成控制系統簡介
通過對捷達GTX試驗樣車的液壓制動系統進行改造,實現了可以獨立調節四個輪缸壓力的ABS/ASR集成系統液壓執行機構。在此基礎上,開發了一種轎車ABS/ASR集成控制系統,主要包括控制系統ECU、傳感器、執行機構三個部分。圖1為轎車ABS/ASR集成控制系統示意圖。
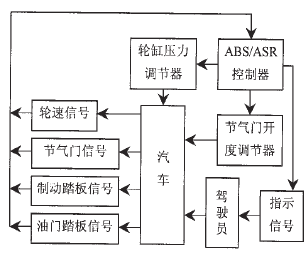
圖1 ABS/ASR集成控制系統框圖
當汽車正常行駛時,ABS/ASR集成控制系統的ECU實時采集和處理傳感器信號,并根據其所提供的信息,選用不同的控制方式對汽車進行控制。控制的方式包括調節車輪輪缸壓力的制動力矩控制模式和調節發動機輸出力矩的節氣門開度控制模式。ABS和ASR子系統功能的實現就是對以上兩種控制方式適當組合和合理控制的結果。
2 ABS/ASR集成控制系統的ECU
2.1 MCU的選取
MCU是ABS/ASR集成控制系統的核心,它負責數據的采集和處理、所有的邏輯運算以及最終控制的實現。考慮到集成控制系統對其運算能力、存儲空間、I/O接口的要求以及后續集成其它系統的目的,選擇了功能強大的Motorola新一代HSC12系列16位MCU——MC9S12DP256。
它具有很強的運算能力、豐富的I/O接口和充裕的存儲空間。采用STAR12 CPU,核心運算能力可以達到50MHz,總線速度可以達到25MHz,采用優化的指令集,指令的運算速度得到了很大的提高。通過片內的PLL功能可以方便地選擇MCU的核心頻率而不管外部晶振頻率為多少。片內集成了256K FLASH、12K RAM和4K EEPROM,完全可以滿足程序對存儲空間的要求。它有豐富的I/O接口,包括兩個異步串行通訊接口(SCI),三個同步串行通訊接口(SPI),八通道輸入捕捉/輸出比較(IC/OC),十六個10位A/D接口,八路8位PWM,二十九路獨立的數字I/O接口,二十路帶中斷和喚醒功能的數字I/O接口,五路CAN總線接口,一個IIC總線接口,一個BDLC(J1850)接口。
該MCU有四路輸入捕捉(帶有保持緩沖器),利用獨立的ECT捕捉時鐘可以自行完成兩個脈沖間的周期計算,非常適合進行四個車輪的輪速采集,大大提高了MCU的工作效率。
MCU的外圍電路采用模塊化設計思想,即把電控單元劃分成不同的模塊,將比較成熟固定的模塊組成一塊單獨的電路板,研究過程中變化較大的模塊組成另一塊單獨的電路板,板與板之間通過I/O擴展插槽進行通信。這種設計方法有利于試驗過程中對系統的維護和擴展,例如需要更改電路或者對系統進行擴展時,無需重新設計整塊電路,只需在相應模塊上改變或添加即可;模塊化設計也具有更好的電氣特性,例如,驅動模塊是比較大的干擾源,對A/D轉換和MCU的工作影響很大,可放在不同的電路板上,對信號線采取隔離措施即可。
根據ABS/ASR集成控制系統的特點,將整個電控單元分為了A板和B板,兩塊電路板之間通過I/O總線擴展插槽連接。
A板主要包括主控芯片MC9S12DP256及其最小系統外圍電路、通訊接口電路和數據采集電路,如圖2所示。
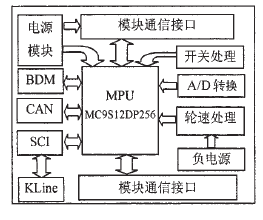
圖2 A板電路結構示意圖
MC9S12DP256最小系統外圍電路包括電源模塊、外圍復位電路、時鐘晶振電路、工作模式選擇等。
通訊接口電路包括BDM接口。兩路SCI串口通訊接口電路,其中一路通過硬件跳線選擇連接故障診斷驅動芯片MC33199,利用PCA82C250驅動芯片引出兩路CAN通訊節點,預留給集成控制系統擴展使用。
A板還包括ECU中的數字量、模擬量和開關量采集處理電路,主要包括四個輪速信號、節氣門開度信號、加速踏板開度信號、高壓蓄能器壓力傳感器信號、制動踏板開關信號等。
B板主要包括執行機構驅動電路和開關量信號處理電路,如圖3所示。
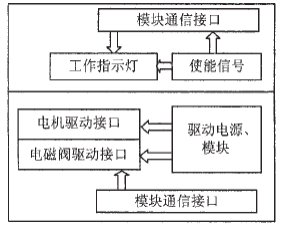
圖3 B板電路結構示意圖
系統驅動的執行機構主要包括ABS壓力調節器的四個常開進油閥、四個常閉出油電磁閥、四個ASR電磁閥和一個ABS電機。
ABS和ASR子系統的使能信號及工作指示燈部分的相關電路也放在該電路板上。
2.3 ECU控制軟件設計
ABS/ASR集成控制系統中ABS和ASR子系統本身都是復雜的控制系統。軟件系統的集成并不是把ABS和ASR控制系統簡單地疊加,而是要把它們有機地融合,同時還要考慮到軟件運行的實時性、可靠性等問題。
集成控制系統的控制軟件主要由系統初始化模塊、啟動自檢模塊、主控制模塊、制動踏板中斷服務程序模塊等幾大部分組成,總體框圖如圖4所示。

圖4 ABS/ASR集成控制系統軟件框圖
系統初始化模塊在系統上電復位時對系統進行初始化。初始化內容包括MCU內部的時鐘、各端口設置、串行通訊接口、模擬和數字通道、看門狗定時器、系統變量等,以保證MCU正常運行。另外還包括對集成系統的執行機構進行復位,確保車輛的安全行駛。
啟動自檢模塊是在系統初始化后對關鍵軟、硬件部分進行靜態檢測,以判斷系統的軟、硬件工作是否正常。如果發現集成控制系統中存在故障,故障警示燈會持續點亮。
主控制模塊為ABS/ASR集成控制系統的控制主程序,見圖4中陰影虛線框。主控制模塊通過實時中斷RTI做固定周期20ms的循環,連續調用故障診斷模塊、數據處理模塊、參考車速計算模塊、路面識別模塊和車輛運動狀態識別模塊,實時進行車輛運動狀態和外界環境的判斷。然后依據車輛當前的運行狀態,由控制執行模塊分別進行ABS或ASR的邏輯門限值控制。
考慮到駕駛員制動動作與ASR制動干預控制的緊急切換需要,設計了制動踏板中斷服務程序。當采集到制動踏板觸發的中斷時,進入制動踏板中斷服務程序,如果集成控制系統處于ASR工作方式,立即退出當前控制,對執行機構模塊進行復位,恢復常規制動方式,不干預駕駛員的制動動作,保證了車輛行駛的安全性。
3 試驗結果與分析
利用所開發的采集系統和本文所設計的ABS/ASR集成控制系統,在捷達GTX試驗車上進行了典型工況ABS和ASR試驗,驗證其控制效果。
ABS試驗選擇在干柏油路面、制動初速度為50km/h的條件下進行,圖5為帶有ABS控制的直線制動過程。圖中顯示了車輛左前輪速度變化的過程,在整個制動過程中與車速都能夠比較好地逼近,車輪的滑移率也被控制在比較理想的區域內,保證了車輛制動過程中方向的穩定性。
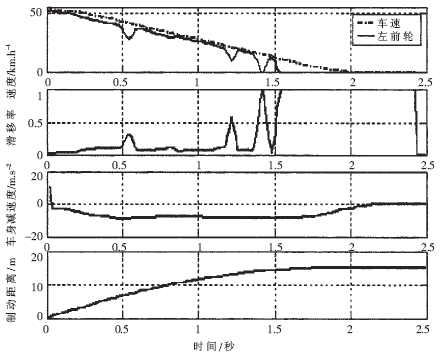
圖5 帶有ABS控制,干路面,初速50km/h條件下的直線制動
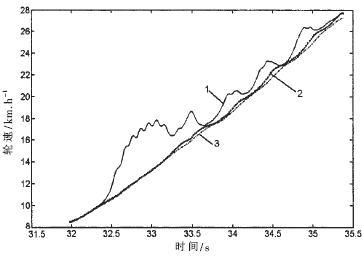
圖6 ASR對開路面上左右兩側驅動輪輪速比較
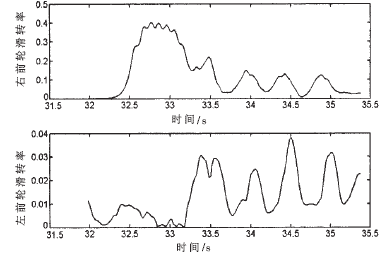
圖7 ASR對開路面上左右兩側驅動輪滑轉率比較
ASR試驗選擇一擋對開路面起步過程,右側車輪位于低附著系數路面上。圖6為起步過程中左右兩側驅動輪轉速對比,其中曲線1為右側驅動輪車速,曲線3為左側驅動輪車速,曲線2為非驅動輪車速,可近似認為是車身速度。可以看到起步初期,右側驅動輪發生明顯的滑轉,在33.5秒附近ASR開始調節,車輪的滑轉明顯改善。圖7為起步過程中左右兩側驅動輪滑轉率的變化曲線,更明顯地反映出進行ASR控制后,右側滑轉驅動輪的滑轉率被控制在較為理想的范圍內。同時,由于制動干預的影響,左側驅動輪的滑轉率略有上升。
通過實車試驗,說明ABS/ASR集成控制系統中的ABS和ASR功能都取得了比較理想的控制效果,為其它底盤主動安全控制系統的集成創造了條件。
責任編輯:gt
-
傳感器
+關注
關注
2548文章
50667瀏覽量
751948 -
mcu
+關注
關注
146文章
16987瀏覽量
350301 -
控制器
+關注
關注
112文章
16198瀏覽量
177398
發布評論請先 登錄
相關推薦
MC9S12DP256B汽車防抱死系統(ABS)的設計
翺捷/ASR產品資訊
ASR6505基于STM 8位MCU的無線通信芯片組
高檔客車ABS及ASR制動系統
氣壓制動系統ABS/ASR裝置的工作原理與檢修
富士通半導體推出113款適于汽車應用的16位和32位MCU
基于ABS/ESP/ASR/ACC橋車主動安全集成系統的設計

基于MC9S12DP256 微處理器的轎車集成電控系統

未來中國16位汽車MCU市場將步入平穩成長期
ASR6505基于STM 8位MCU與SX1262 的SiP全頻段LoRa芯片






 工商網監
工商網監
評論