") 淺析基于FPGA自動白平衡算法的簡述與實戰(zhàn)
淺析基于FPGA自動白平衡算法的簡述與實戰(zhàn)
1 白平衡介紹
對于白平衡基本概念的詳細介紹請查看文章《白平衡初探》,白平衡算法主要的作用是將偏暖或者偏冷的色調(diào)自動恢復(fù)到正常色調(diào),是圖像看起來更加色彩飽滿正常。
如上圖所示,左1色溫偏冷,中間色溫正常,右一色溫偏暖。上圖比較直觀的展示了色溫的概念。偏冷的色溫會給人一種還冷的感覺,偏暖的色溫會給人一種溫暖的感覺。
2 白平衡算法以及matlab實現(xiàn)
1)原始的灰度世界算法
灰度世界算法(Gray World)是以灰度世界假設(shè)為基礎(chǔ)的,該假設(shè)認為對于一幅有著大量色彩變化的圖像, R、 G、 B 三個分量的平均值趨于同一個灰度K。一般有兩種方法來確定該灰度。
(1)直接給定為固定值, 取其各通道最大值的一半,即取為127或128;
(2)令 K = (Raver+Gaver+Baver)/3,其中Raver,Gaver,Baver分別表示紅、 綠、 藍三個通道的平均值。
算法的第二步是分別計算各通道的增益:
Kr=K/Raver;
Kg=K/Gaver;
Kb=K/Baver;
算法第三步為根據(jù)Von Kries 對角模型,對于圖像中的每個像素R、G、B,計算其結(jié)果值:
Rnew = R * Kr;
Gnew = G * Kg;
Bnew = B * Kb;
對于上式,計算中可能會存在溢出(》255,不會出現(xiàn)小于0的)現(xiàn)象,處理方式有兩種。
a、 直接將像素設(shè)置為255,這可能會造成圖像整體偏白。
b、 計算所有Rnew、Gnew、Bnew的最大值,然后利用該最大值將將計算后數(shù)據(jù)重新線性映射到[0,255]內(nèi)。實踐證明這種方式將會使圖像整體偏暗,建議采用第一種方案。
2)完美反射算法
原理:完美全反射理論perfect Reflector假設(shè)圖像上最亮點就是白點,并以此白點為參考對圖像進行自動白平衡,最亮點定義為R+G+B的最大值,具體編碼步驟如下:
(1)計算每個像素的RGB之和,并保存到一臨時內(nèi)存塊中。
(2)按R+G+B值的大小計算出其前10%或其他Ratio的白色參考點的的閾值T。
(3)遍歷圖像中的每個點,計算其中R+G+B值大于T的所有點的RGB分量的累積和的平均值。
(4)對每個點將像素量化到[0,255]之間。
3)動態(tài)閾值法
(1)。 把圖像w*h從RGB空間轉(zhuǎn)換到Y(jié)CrCb空間。
(2)。 選擇參考白色點:
a. 把圖像分成寬高比為4:3個塊(塊數(shù)可選)。
b. 對每個塊,分別計算Cr,Cb的平均值Mr,Mb。
c. 對每個塊,根據(jù)Mr,Mb,用下面公式分別計算Cr,Cb的方差Dr,Db。
d. 判定每個塊的近白區(qū)域(near-white region)。
判別表達式為:
設(shè)一個“參考白色點”的亮度矩陣RL,大小為w*h。
若符合判別式,則作為“參考白色點”,并把該點(i,j)的亮度(Y分量)值賦給RL(i,j);
若不符合,則該點的RL(i,j)值為0。
(3)。 選取參考“參考白色點”中最大的10%的亮度(Y分量)值,并選取其中的最小值Lu_min.
(4)。 調(diào)整RL,若RL(i,j)《Lu_min, RL(i,j)=0; 否則,RL(i,j)=1;
(5)。 分別把R,G,B與RL相乘,得到R2,G2,B2。 分別計算R2,G2,B2的平均值,Rav,Gav,Bav;
(6)。 得到調(diào)整增益:
Ymax=double(max(max(Y)))/5;
Rgain=Ymax/Rav;
Ggain=Ymax/Gav;
Bgain=Ymax/Bav;
(7)。 調(diào)整原圖像:
Ro= R*Rgain;
Go= G*Ggain;
Bo= B*Bgain;
FPGA的實現(xiàn)采用灰度世界算法。
Matlab代碼:
close allclear allclcI=imread(‘test1.jpg’);[H,W,L]=size(I);%得到圖像長寬高Rsum = 0;Gsum = 0;Bsum = 0;Rsum = double(Rsum);Gsum = double(Gsum);Bsum = double(Bsum);for i = 1 : H for j = 1 :W Rsum = Rsum + double(I(i,j,1)); Gsum = Gsum + double(I(i,j,2)); Bsum = Bsum + double(I(i,j,3)); endendRaver = Rsum / (H*W);Gaver = Gsum / (H*W);Baver = Bsum / (H*W);%K=128;%第一種K取值方法K = (Raver+Gaver+Baver)/3;%第二種方法Rgain = K / Raver;Ggain = K / Gaver;Bgain = K / Baver;Iwb(:,:,1) = I(:,:,1) * Rgain;Iwb(:,:,2) = I(:,:,2) * Ggain;Iwb(:,:,3) = I(:,:,3) * Bgain;imwrite(Iwb,‘Result1.jpg’);figure(1),subplot(121),imshow(I),title(‘原始圖像’);subplot(122),imshow(Iwb),title(‘自動白平衡圖像’);
效果展示:
3 FPGA實現(xiàn)自動白平衡灰度世界法
灰度世界法Verilog代碼:
/**********************************copyright@FPGA OPEN SOURCE STUDIO微信公眾號:FPGA開源工作室Algorithm:Auto White balance Gray World 800X600X255=480000***********************************/`define XLEN 32`define N(n) [(n)-1:0]module White_balance#( parameter DW = 24 )( input pixelclk, input reset_n, input [DW-1:0] din, //rgb in input i_hsync, input i_vsync, input i_de,
output [DW-1:0] dout, //gray out output o_hsync, output o_vsync, output o_de ); localparam STAGE_LIST = 32‘h0101_0101;//32’b00000000_00000000_00000000_00000000;localparam divisor = 32‘h0007_5300;//800*600localparam divisorK = 32’h0000_0003;//800*600 wire [7:0] R,G,B;reg [27:0] sumr,sumg,sumb;reg [27:0] sumr_r,sumg_r,sumb_r;wire [9:0] Kave;wire [7:0] K;
wire Rack;wire `N(`XLEN) Rquo,Rrem;
wire Gack;wire `N(`XLEN) Gquo,Grem;
wire Back;wire `N(`XLEN) Bquo,Brem;
wire Kack;wire `N(`XLEN) Kquo,Krem;
wire GRack;wire `N(`XLEN) GRquo,GRrem;
wire GGack;wire `N(`XLEN) GGquo,GGrem;
wire GBack;wire `N(`XLEN) GBquo,GBrem;
reg [39:0] R_r,G_r,B_r;wire [7:0] RO,GO,BO;
reg hsync_r1;reg vsync_r1;reg de_r1;
reg i_vsync_r;reg vsync_neg_r;
wire vsync_neg=(i_vsync_r&(~i_vsync));
assign Kave=(Rquo+Gquo+Bquo);assign K=Kquo[7:0];
assign R=din[23:16];assign G=din[15:8];assign B=din[7:0];
assign o_hsync = hsync_r1;assign o_vsync = vsync_r1;assign o_de = de_r1;
assign RO=(R_r[18:10]》255)?255:R_r[17:10];assign GO=(G_r[18:10]》255)?255:G_r[17:10];assign BO=(B_r[18:10]》255)?255:B_r[17:10];assign dout={RO,GO,BO};
//synchronizationalways @(posedge pixelclk) begin hsync_r1 《= i_hsync; vsync_r1 《= i_vsync; de_r1 《= i_de;end
always @(posedge pixelclk or negedge reset_n)begin if(!reset_n)begin sumr《=28‘d0;《 span=“”》 sumg《=28’d0;《 span=“”》 sumb《=28‘d0;《 span=“”》 sumr_r《=28’d0;《 span=“”》 sumg_r《=28‘d0;《 span=“”》 sumb_r《=28’d0;《 span=“”》 i_vsync_r《=1‘b0;《 span=“”》 vsync_neg_r《=1’b0;《 span=“”》 R_r《=40‘b0;《 span=“”》 G_r《=40’b0;《 span=“”》 B_r《=40‘b0;《 span=“”》 end else begin i_vsync_r《=i_vsync;《 span=“”》 vsync_neg_r《=vsync_neg;《 span=“”》 R_r《=r*grquo;《 span=“”》 G_r《=g*ggquo;《 span=“”》 B_r《=b*gbquo;《 span=“”》 if(vsync_neg==1’b1) begin sumr_r《=sumr;《 span=“”》 sumg_r《=sumg;《 span=“”》 sumb_r《=sumb;《 span=“”》 end if(i_vsync==1‘b1) begin if(i_de==1’b1) begin sumr《=sumr+r;《 span=“”》 sumg《=sumg+g;《 span=“”》 sumb《=sumb+b;《 span=“”》 end else begin sumr《=sumr;《 span=“”》 sumg《=sumg;《 span=“”》 sumb《=sumb;《 span=“”》 end end else begin sumr《=28‘d0;《 span=“”》 sumg《=28’d0;《 span=“”》 sumb《=28‘d0;《 span=“”》 end endend
//Rave divfunc #( .XLEN ( `XLEN ), .STAGE_LIST ( STAGE_LIST )
) i_divR ( .clk ( pixelclk ), .rst ( ~reset_n ), .a ( {4’b0,sumr_r} ), .b ( divisor ), .vld ( vsync_neg_r ), .quo ( Rquo ), .rem ( Rrem ), .ack ( Rack )
);
//Gave divfunc #( .XLEN ( `XLEN ), .STAGE_LIST ( STAGE_LIST )
) i_divG ( .clk ( pixelclk ), .rst ( ~reset_n ), .a ( {4‘b0,sumg_r} ), .b ( divisor ), .vld ( vsync_neg_r ), .quo ( Gquo ), .rem ( Grem ), .ack ( Gack )
);
//Bave divfunc #( .XLEN ( `XLEN ), .STAGE_LIST ( STAGE_LIST )
) i_divB ( .clk ( pixelclk ), .rst ( ~reset_n ), .a ( {4’b0,sumb_r} ), .b ( divisor ), .vld ( vsync_neg_r ), .quo ( Bquo ), .rem ( Brem ), .ack ( Back )
);
//Kdivfunc #( .XLEN ( `XLEN ), .STAGE_LIST ( STAGE_LIST )
) i_divK ( .clk ( pixelclk ), .rst ( ~reset_n ), .a ( {22‘b0,Kave} ), .b ( divisorK ), .vld ( Back ), .quo ( Kquo ), .rem ( Krem ), .ack ( Kack )
);
//RGaindivfunc #( .XLEN ( `XLEN ), .STAGE_LIST ( STAGE_LIST )
) i_divGR ( .clk ( pixelclk ), .rst ( ~reset_n ), .a ( {14’b0,K,10‘b0} ), .b ( Rquo ), .vld ( Kack ), .quo ( GRquo ), .rem ( GRrem ), .ack ( GRack )
);
//GGaindivfunc #( .XLEN ( `XLEN ), .STAGE_LIST ( STAGE_LIST )
) i_divGG ( .clk ( pixelclk ), .rst ( ~reset_n ), .a ( {14’b0,K,10‘b0} ), .b ( Gquo ), .vld ( Kack ), .quo ( GGquo ), .rem ( GGrem ), .ack ( GGack )
);
//BGAINdivfunc #( .XLEN ( `XLEN ), .STAGE_LIST ( STAGE_LIST )
) i_divGB ( .clk ( pixelclk ), .rst ( ~reset_n ), .a ( {14’b0,K,10‘b0} ), .b ( Bquo ), .vld ( Kack ), .quo ( GBquo ), .rem ( GBrem ), .ack ( GBack )
);
endmodule
1)仿真效果
原始圖像
經(jīng)過灰度世界法的白平衡仿真效果
2)下板驗證模型以及實現(xiàn)效果
下板驗證圖像由筆記本電腦通過HDMI輸入到FPGA芯片,經(jīng)過FPGA算法處理后在通過HDMI將圖像送到顯示屏展示處理效果。
筆記本電腦顯示圖片
經(jīng)過FPGA處理后的顯示效果
編輯:lyn
-
FPGA
+關(guān)注
關(guān)注
1626文章
21669瀏覽量
601867 -
白平衡
+關(guān)注
關(guān)注
0文章
14瀏覽量
7991
原文標題:基于FPGA的自動白平衡算法的實現(xiàn)
文章出處:【微信號:leezym0317,微信公眾號:FPGA開源工作室】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
AI ISP的技術(shù)優(yōu)勢和市場前景
FPGA在自動駕駛領(lǐng)域有哪些優(yōu)勢?
FPGA在自動駕駛領(lǐng)域有哪些應(yīng)用?
凱茉銳電子|索尼FCB-EV9500M點聚焦、點曝光與點白平衡的定義和功能
簡述雙平衡混頻器的原理及應(yīng)用
基于FPGA的常見的圖像算法模塊總結(jié)

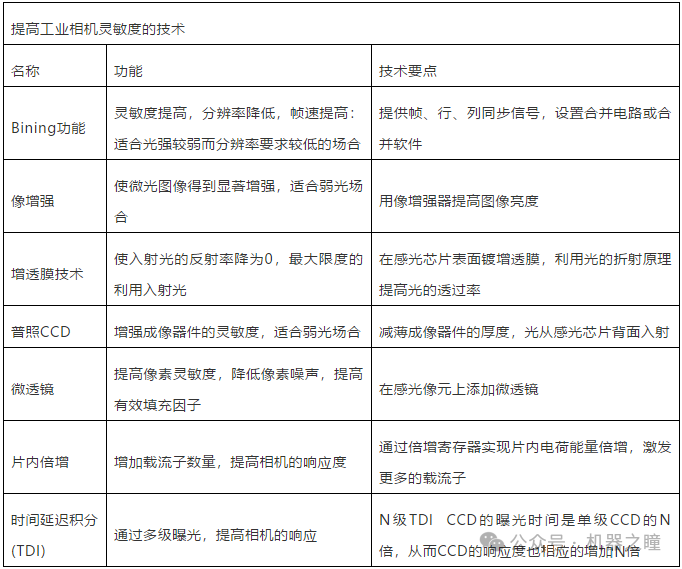
工業(yè)相機相關(guān)知識科普
什么是白平衡?白平衡的作用
怎么用FPGA做算法 如何在FPGA上實現(xiàn)最大公約數(shù)算法
浮點LMS算法的FPGA實現(xiàn)
fpga布局布線算法加速
Mahony濾波算法參數(shù)自動調(diào)節(jié)方法介紹
基于FPGA的平衡小車設(shè)計






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論