") 基于GPS和航位推算技術(shù)實(shí)現(xiàn)組合導(dǎo)航系統(tǒng)的應(yīng)用方案
基于GPS和航位推算技術(shù)實(shí)現(xiàn)組合導(dǎo)航系統(tǒng)的應(yīng)用方案
GPS (全球定位系統(tǒng)) 是美國(guó)第二代無線電衛(wèi)星導(dǎo)航定位系統(tǒng), 它能夠全球性、全天候、實(shí)時(shí)地提供導(dǎo)航、定位和授時(shí)信息, 但它要求對(duì)衛(wèi)星有直接的可見性才能發(fā)揮其正常功能。鑒于山城重慶自身的交通環(huán)境特點(diǎn): 在遇到城市高層建筑物、林蔭道、立交橋及涵洞隧道等時(shí), GPS 接收機(jī)所收到的導(dǎo)航衛(wèi)星的信號(hào)質(zhì)量會(huì)明顯地下降, 甚至干脆出現(xiàn)“丟星現(xiàn)象”。這使得單獨(dú)使用GPS 來導(dǎo)航定位不能夠連續(xù)地為運(yùn)動(dòng)車輛提供導(dǎo)航定位信息。因此采用了組合定位技術(shù)解決上述問題,下面具體分析。
航位推算(DR,Dead-Reckoning) 是一種常用的導(dǎo)航定位技術(shù), 其基本原理是利用方向傳感器和速度傳感器來推算車輛的瞬時(shí)位置, 可以實(shí)現(xiàn)連續(xù)自主式定位。但由于其推算過程是一個(gè)累加過程, 方向傳感器的誤差隨時(shí)間的延長(zhǎng)而積累另外, 推算只能確定相對(duì)位置和航向。導(dǎo)航開始時(shí), 需要預(yù)知車輛的初始絕對(duì)位置和方向, 因此, 航位推算方法并不能單獨(dú)、長(zhǎng)時(shí)間地使用。將航位推算與GPS 組合起來, 兩者取長(zhǎng)補(bǔ)短, 可以彌補(bǔ)各自的缺點(diǎn), 確保系統(tǒng)能在任何時(shí)候都能為運(yùn)動(dòng)車輛提供較為準(zhǔn)確的導(dǎo)航信息。一方面可以利用GPS精確的定位結(jié)果輔助DR 的初始化并且可以定期地用它對(duì)DR 的定位誤差進(jìn)行在線校正另一方面, 在GPS無法定位時(shí)系統(tǒng)又可以自動(dòng)地切換到DR 導(dǎo)航方式,直至GPS 恢復(fù)正常接收后, 系統(tǒng)再回到GPS 與DR 的組合導(dǎo)航方式。與此同時(shí), 再實(shí)時(shí)地對(duì)組合導(dǎo)航系統(tǒng)的輸出信息與電子地圖進(jìn)行匹配, 便可以將導(dǎo)航輸出信息可視化, 解決了司機(jī)定向難的問題。
車載GPS/DR 組合導(dǎo)航系統(tǒng)的組成
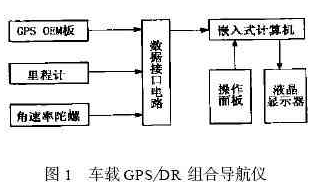
車載GPS/DR 組合導(dǎo)航儀由3 部分組成: GPS 定位系統(tǒng)部分航位推算部分地圖匹配部分。圖1 為車載GPS/DR 組合導(dǎo)航儀的原理圖。
全球定位系統(tǒng)
全球定位系統(tǒng)由GPS-OEM 主板、數(shù)據(jù)轉(zhuǎn)換板、天線及電源等組成。
目前, 有很多廠商都能提供GPS-OEM 板產(chǎn)品, 如SiRF、Conexant、Sych ip、GARM IN 等公司。其中美國(guó)GARM IN 公司是世界上最著名、深受用戶信賴的專業(yè)GPS 廠家, 在GPS 的定位、導(dǎo)航領(lǐng)域一直走在世界最前列。由于GARM IN OEM 板的定位速度快、工作穩(wěn)定、耐電壓沖擊和高抗干擾性, 因而此方案采用了GARM IN 公司出品的GPS15-LVC 板。
數(shù)據(jù)轉(zhuǎn)換板與GPS-OEM 板連結(jié), 其作用是接收GPS 主板的原始數(shù)據(jù)、提取需要的數(shù)據(jù)并將其轉(zhuǎn)換為與用戶機(jī)所需的數(shù)據(jù)格式, 通過串口發(fā)送給用戶機(jī)。
航位推算系統(tǒng)
航位推算系統(tǒng)由角速率陀螺、里程計(jì)、低通濾波器、V/F 轉(zhuǎn)換器、電平轉(zhuǎn)換器、計(jì)數(shù)器、微處理器、通訊線路等硬件組成, 其中方向傳感器采用角速率陀螺, 距離傳感器采用里程計(jì)。
航位推算方法是一種常用的自主式車輛定位技術(shù), 其中航向和距離傳感器被用來測(cè)量位移矢量, 從而推算車輛的位置。車輛在tk 時(shí)刻的位置可表示為:
其中, (x0, y0) 是車輛在t0時(shí)刻的初始位置, (xk , yk) 為車輛在tk 時(shí)刻的位置Si,θi分別是車輛從ti 時(shí)刻的位置(xi, yi) 到ti+ 1時(shí)刻的位置(xi+1, yi+1) 的位移矢量的長(zhǎng)度和絕對(duì)航向。相對(duì)航向定義為連續(xù)兩個(gè)絕對(duì)航向之差, 用Xi表示。若給出了t0、t1、tk時(shí)刻的相對(duì)航向測(cè)量值Xi, 則tk時(shí)刻的車輛絕對(duì)航向θk 可由下式計(jì)算:
地圖匹配
地圖匹配算法采用概率決定的方法。系統(tǒng)必須知道起始點(diǎn)的位置和航向角。通常用速率陀螺儀給出的航向變化與車輛預(yù)期位置附近的地圖特征進(jìn)行相關(guān)性比較, 當(dāng)測(cè)量出的車輛航向的顯著變化與數(shù)字地圖的矢量路線變化相關(guān), 那么車輛的真實(shí)位置可以在地圖上確定。根據(jù)車輛的具體位置可校正傳感器的漂移誤差, 同時(shí)對(duì)車輪直徑誤差等誤差進(jìn)行標(biāo)定。相關(guān)性地圖匹配算法在車輛行駛航向有比較大的改變時(shí)(例如車輛在十字路口拐彎時(shí)) 效果最好。
試驗(yàn)結(jié)果
為了驗(yàn)證系統(tǒng)的定位精度、可靠性, 對(duì)比GPS 系統(tǒng)與GPS/DR 組合系統(tǒng)的性能, 利用1∶500 的比例尺地圖制作了電子地圖, 選擇跑車路線如圖2 所示, 進(jìn)行跑車試驗(yàn)。所得試驗(yàn)結(jié)果表明當(dāng)單獨(dú)GPS 定位時(shí),所得定位軌跡是不連續(xù)的, 并且有“上房現(xiàn)象”。而采用GPS/DR 進(jìn)行組合后, 其定位軌跡連續(xù), 且始終行駛在正確的道路上。

結(jié)論
GPS/DR 組合車輛定位導(dǎo)航系統(tǒng)將GPS 與DR相結(jié)合, 提高了系統(tǒng)的有效性、完整性和精度。利用DR 航跡推算系統(tǒng)能保證衛(wèi)星信號(hào)丟失時(shí)車輛位置信息輸出, 還能利用地圖匹配技術(shù)來進(jìn)一步提高精度。系統(tǒng)具有全方位、全天候、無遮擋、高精度的特點(diǎn), 具有良好的應(yīng)用前景。
責(zé)任編輯:gt
-
傳感器
+關(guān)注
關(guān)注
2548文章
50740瀏覽量
752138 -
gps
+關(guān)注
關(guān)注
22文章
2886瀏覽量
166054 -
導(dǎo)航系統(tǒng)
+關(guān)注
關(guān)注
2文章
257瀏覽量
30679
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
城市軌道車輛組合定位導(dǎo)航系統(tǒng)的研究與開發(fā)
怎么實(shí)現(xiàn)基于DSP的車載GPS/DR組合導(dǎo)航系統(tǒng)硬件設(shè)計(jì)?
請(qǐng)問怎樣去設(shè)計(jì)車載GPS/DR組合導(dǎo)航系統(tǒng)?
基于MIMU、GPS組合導(dǎo)航系統(tǒng)的應(yīng)用研究
GPS導(dǎo)航系統(tǒng),GPS導(dǎo)航系統(tǒng)是什么意思
基于GPS的小型組合導(dǎo)航系統(tǒng)設(shè)計(jì)

捷聯(lián)慣導(dǎo)_航位推算組合導(dǎo)航算法研究
MIMU_GPS組合導(dǎo)航系統(tǒng)小型化設(shè)計(jì)
縮短積分時(shí)間可以提高航位推算導(dǎo)航系統(tǒng)的精度
車載GPS/DR組合導(dǎo)航系統(tǒng)硬件設(shè)計(jì)

DSP與FPGA結(jié)合的車載GPS/DR組合導(dǎo)航系統(tǒng)硬件系統(tǒng)設(shè)計(jì)分析

基于雙口RAM的組合導(dǎo)航系統(tǒng)設(shè)計(jì)與應(yīng)用





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論