 基于超聲波測距技術的3-D輸入設備的應用方案
基于超聲波測距技術的3-D輸入設備的應用方案
電子技術應用 作者:彭剛,黃心漢,熊春山,王敏
傳統的2-D輸入設備,如鼠標,軌跡球和繪圖板等只能提供二維(平面)位置信息,不能提供其在空間坐標系中的三維位置和方向信息,從而限制了它們在未來3-D圖形化人機交互界面系統,尤其是遙操作機器人和虛擬現實系統中的應用。
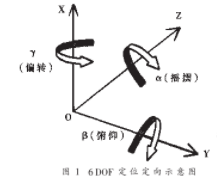
當前的3-D輸入設備依據原理可分為機械式、電磁式、光學式、聲學式和慣性式等。由于聲學式的3-D輸入設備具有易于實現、成本低、對光線不敏感、無電磁輻射等優點,我們采用超聲波測距技術來實現具有6個自由度(DOF)的3-D輸入設備,并結合自動增益控制(AGC),自適應可變閾值技術和溫度補償技術,以提高距離檢測精度,從而測得安裝在輸入設備上的超聲波發射探頭到三個接收探頭的距離。經過空間解析幾何運算,可得3-D輸入設備在空間坐標系中的6個自由度信息:位置(x,y,z)和方向(γ,β,α)(即姿態,也就是繞X、Y和Z軸的旋轉角),如圖1所示。同時,檢測3-D輸入設備上的按鍵狀態,確定所要實現的操作。
1 超聲波測距
1.1 測距原理
輸入設備的三維定位與定向基于一維測距技術。要實現三維定位與定向,就需要獲得發射點到接收點的距離值。超聲波測距的方法有多種:如相位檢測法、聲波幅值檢測法和渡越時間檢測法等。相位檢測法雖然精度高,但檢測范圍有限;聲波幅值檢測法易受反射波的影響。本文采用渡越時間檢測法,其原理為:檢測從發射換能器發出的超聲波,經氣體介質傳播到接收換能器的時間,即渡越時間。渡越時間與氣體介質中的聲速相乘,便可得到超聲波發射器和接收器之間的距離。
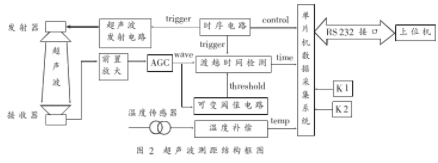
在3-D輸入設備定位與定向系統中,選用工作頻率為40kHz的PZT5壓電陶瓷振動模式的超聲波換能器。超聲波測距原理結構框圖如圖2所示。三路超聲波發射接收框圖都相同,圖2只畫出了一路超聲波發射接收框圖。
1.2 渡越時間檢測
時序電路控制超聲波換能器以固定的時間間隔來發射超聲波。電路時序及各信號波形如圖3所示。
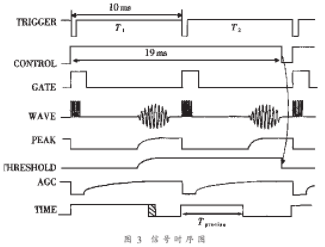
整個電路的時序由TRIGGER信號控制。CONTROL信號由TRIGGER信號負跳沿觸發,它把觸發周期T1和T2合并為一個檢測周期,這樣是為了達到可變閾值檢測的目的。其中,T1為精密峰值檢測周期,T2為可變閾值檢測周期。GATE信號是為了屏蔽虛假接收波。WAVE信號為超聲波發射及接收信號。發射的脈沖數應選擇合適,脈沖個數多有不少優點:脈沖能量大,受其它聲波模式影響較小等;但脈沖個數多,盲區大,且余振波頭也多。通過實驗,取4個脈沖。PEAK信號是精密峰值信號,由積分充電電路得到。由于接收波隨距離增加迅速衰減,為了使接收波的幅值不隨測量距離的變化而大幅度地變化,采用可變增益控制(AGC)技術,有利于獲得精確的距離信息。
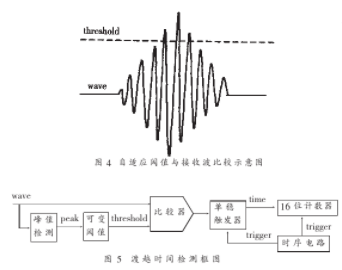
THRESHOLD信號為自適應可變閾值信號,它反映前一周期接收波信號的幅值大小。相鄰兩個接收波信號的峰值相差不大,將T1周期得到的精密峰值乘以一個比例因子,得到THRESHOLD信號,作為T2周期的閾值,和WAVE信號相比較,保證每次在同一個接收波頭(在本系統中,n=4)后開始封鎖計數器,獲得渡越時間(如圖4和圖5),從而不受接收波幅值大小的影響,提高了測量的精度。
1.3 距離計算和溫度補償
超聲波發射點到接收點的距離D為:
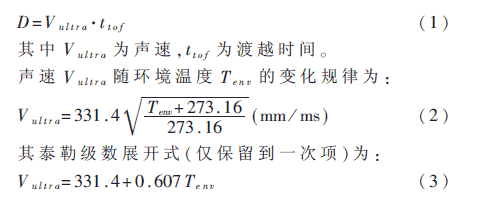
因此,溫度每變化1度,聲波的速度變化0.6(mm/ms)。若渡越時間達到9ms(距離約為3m),就會產生約5mm的誤差。溫度變化2度時,則產生約1cm的誤差,因而必須進行溫度補償。
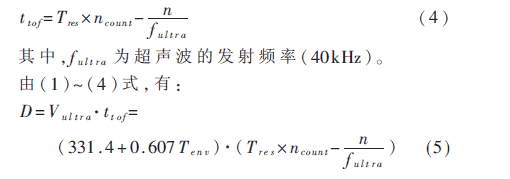
用4MHz的方波信號作為計數脈沖,計數器的時間分辨率為Tres=0.25×10-3(ms)。設在渡越時間ttof內,計數器的值為ncount,由于計數器是在第n個接收波頭后被封鎖,則有:
這種采用檢測超聲波渡越時間的方法,結合自動增益控制(AGC)和自適應可變閾值技術,并加入溫度補償,提高了距離檢測精度,有利于獲得3-D輸入設備精確的位置和姿態信息。
2 6DOF輸入設備的設計原理
2.1 三維定位原理
根據三角測量原理可以實現三維定位。在參考坐標系的原點、X軸和Y軸分別安裝上三個超聲波接收器Ro、Rx、Ry,在輸入設備上安裝超聲波發射器T,其在參考坐標系中的位置為(x,y,z),如圖6所示。
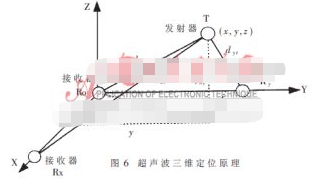
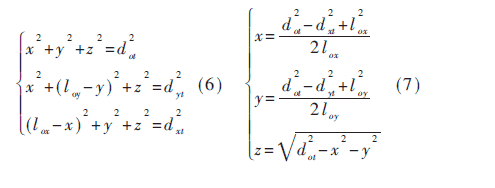
設Ro與Rx之間的距離為lox,Ro與Ry之間的距離為loy。通過超聲波測距,測出Ro到發射器T的距離為dot,Rx到發射器T的距離為dxt,Ry到發射器T的距離為dyt,根據三角測量原理,有(6)式,可解得發射點T的三維直角坐標表示形式,如式(7)所示。
2.2 三維定向原理
要進行三維定向測量,需在輸入設備上安裝三個超聲波發射器Ta、Tb、Tc,這三個發射點在參考坐標 中的位置可通過上述的方法依次獲得,如圖7所示。
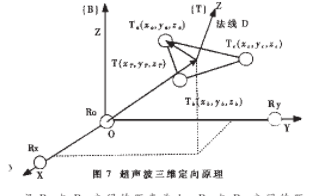
三角形TaTbTc所在坐標系為Tx-y-z,它在參考坐標系Bx-y-z中的位置與姿態的描述可用一個4×4的變換矩陣

表示:

設三角形TaTbTc三條邊的中線交點為T。定義坐標系Tx-y-z:T為坐標原點,三角形的法線D為坐標系Tx-y-z的z軸、TTa為坐標系Tx-y-z的x軸,y軸則由右手法則確定。則變換矩陣
描述了坐標系{Tx-y-z}相對于參考坐標系{Bx-y-z}的方位,即有:
:Tx-y-z→Bx-y-z。于是,法線D的方向矢量為:
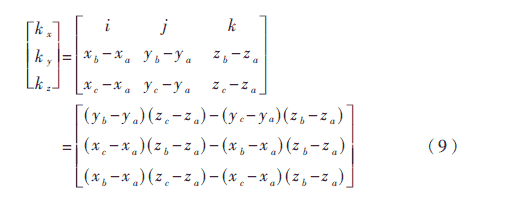
三角形TaTbTc三條邊的中線交點T在參考坐標系BX-Y-Z中的位置(xT,yT,zT)可由下式求出:
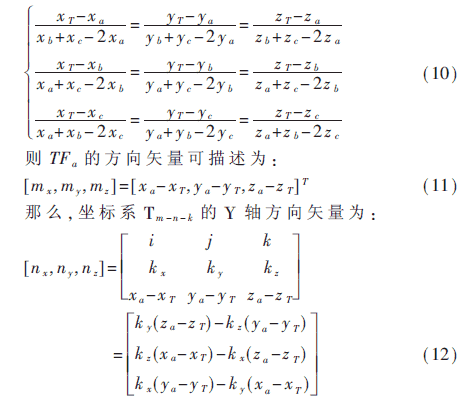
經歸一化后,變換矩陣為:
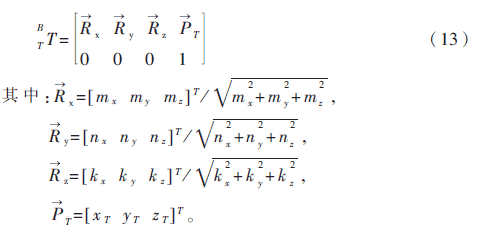
然后,根據(8)式就可求出3-D輸入設備在參考坐標系Bx-y-z中的6個自由度信息:位置(x,y,z)和方向(γ,β,α)(即姿態,也就是繞X、Y和Z軸的旋轉角)。從中可知,只要測出三個超聲波發射器到三個超聲波接收器的距離,經過空間解析幾何運算,就可求出描述輸入設備位置與姿態的變換矩陣。
3 實驗
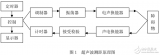
基于超聲波測距技術的3-D輸入設備系統主要是由三路超聲波檢測電路、溫度補償電路和89C51單片機數據采集系統組成。單片機通過RS232串行口把3路ncount、溫度Tenv以及按鍵K1和K2的閉合情況傳送給上位機。數據通信的波特率為19.2Kbps。數據發送格式為:
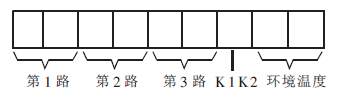
三路計數值和環境溫度用兩個字節表示,低位在前,高位在后;K1和K2用一個字節的低兩位表示,1表示斷開,0表示閉合,且bit0代表左鍵K1的閉合情況,bit1代表右鍵K2的閉合情況。上位機接收到各測量值后,根據空間解析幾何法計算出輸入設備在參考坐標系中的位置和姿態,完成6DOF輸入設備的三維定位與定向。并根據按鍵K1和K2的閉合情況,確定所要實現的操作。
3-D輸入設備的設計關鍵在于精確的距離測量。為了檢驗本系統測距的精確度和可靠性,我們在實驗室中把超聲波發射裝置安裝在機器人MOVEMASTER-EX的末端執行器上,這樣機器人的末端執行器就相當于一個3-D輸入設備,在工作平臺上安裝三個超聲波接收器。實驗時,移動機器人到任一位置,通過本系統測量超聲波發射裝置在空間參考坐標系中的三維位置(x,y,z)和方向(γ,β,α)(即姿態,也就是繞X、Y和Z軸的旋轉角),并和末端執行器的真實位置與姿態做比較,測量值和真實值是一致的。其中,距離測量誤差在滿量程3m的范圍內可達±0.2mm,三維位置坐標在1m3工作空間內的最大誤差為±3mm。由于缺乏精確的旋轉角度測試平臺標準,沒有進行有關旋轉角度的誤差試驗。實驗表明了這種基于超聲波測距技術的6DOF輸入設備的定位與定向方法的有效性和可靠性。
本文提出了基于超聲波測距技術的3-D輸入設備的設計原理和方法。除了可提供輸入設備在三維(空間)坐標系中的位置和姿態的6個自由度信息外,還克服了傳統機械式、光電式等二維(平面)輸入設備,如鼠標、軌跡球易磨損,易受粉塵影響等缺點。可用于機器人操作手的空間定位與定向,3-D圖形化人機交互系統的輸入設備,以及虛擬現實系統中的頭盔跟蹤、視點導航和目標操縱等領域。具有精度高、成本低、易于實現、抗電磁干擾能力強,對光線不敏感、無電磁輻射等優點。
責任編輯:gt
-
人機交互
+關注
關注
12文章
1201瀏覽量
55328 -
超聲波
+關注
關注
63文章
2991瀏覽量
138250 -
輻射
+關注
關注
1文章
596瀏覽量
36310 -
RS232
+關注
關注
13文章
740瀏覽量
94253 -
換能器
+關注
關注
8文章
343瀏覽量
29391
發布評論請先 登錄
相關推薦
超聲波測距原理
超聲波測距系統畢設
基于時差測距的超聲波測距系統的軟硬件設計
基于STM32的超聲波測距設計

超聲波測距技術方案匯總
超聲波測距原理及超聲波倒車雷達的設計





 工商網監
工商網監
評論