 如何用計算機視覺技術實現SLAM的工作流程
如何用計算機視覺技術實現SLAM的工作流程
簡介
在汽車最初誕生之時,它僅僅被視作將我們從一個地點快速運送到另一地點的交通工具;但作為如此具有革命性意義的發明,它顛覆了人類了解世界的方式,理所當然也將享受持續創新的加持。
智能化工具的搭載讓汽車愈加聰慧,先是以抱死和動力轉向為代表的駕駛員輔應用,現有人工智能(AI)助力下自動駕駛汽車的崛起。追本溯源,自動駕駛汽車(Autonomous vehicles)須具備的一大關鍵屬性就是追蹤定位和運動的能力。
90 年代出現的汽車 GPS 技術已沿用至今,運動追蹤現已成為相對簡單的任務。但作為一項技術而言,它打開了通往多種定位和路線規劃應用的大門。然而,我們也要承認 GPS 的局限性。它的精度只有數米,不適合需要追蹤小距離或微距離運動的場景以及在高樓大廈林立的城市或山地等 GPS 衛星不可用的環境,數據獲取的困難性也給 GPS 判了死刑。
隨著汽車變得更加自動化,并開始具備感知周圍環境的能力,對追蹤細微英寸=2.54 厘米)級,且無需衛星互聯。SLAM 的本質是將未知環境的地圖構建轉化為計算問題,并同步追蹤物體在同一環境的即時定位(包括位置和方向)。SLAM 可以追蹤 6 個運動的自由度(6DoF),包括 3 個位置度(上/下、前/后、左/右)和 3 個定向度(偏航、俯仰、滾轉),來確定你在環境中的位置(見圖 1)。
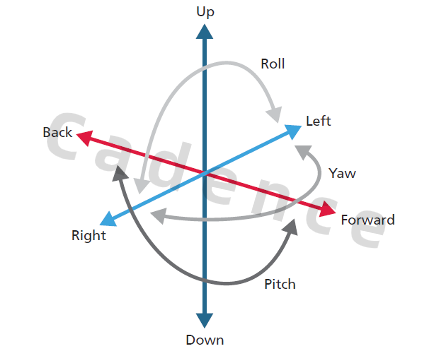
圖 1
SLAM 的用途非常廣泛。比如,在地圖構建應用中,SLAM 可以被用于識別你在所處環境的朝向,如果應用判斷你在交叉路口朝向西北,它就可以告訴你接下來要右轉還是左轉。GPS 計算只知道你現在位于一個交叉路口,卻無法知道你的朝向。
即時定位與地圖構建
SLAM 讓設備擁有了定位感知能力,嵌入式視覺應用也因此取得了重大進步。基于 SLAM,一輛汽車不僅能追蹤朝向或方向(定向),同時也可以感知它在所處環境內部的運動方式(位置、速度和高度)。
SLAM 運算所需的數據通常只需由攝像頭傳感器獲取,這個過程被稱作視覺實時定位建模(VSLAM)。最近幾年,隨著更多可用傳感器的使用,SLAM 也隨之進化,開始融合不同傳感器的數據。
SLAM 系統的工作原理是通過連續的影像幀和其它傳感器數據對一系列特征點進行追蹤,對攝像頭的 3D 位置進行三角化,并利用這些信息同步估測攝像頭(或其它傳感器)的定向。只要確保每一幀影像有足夠的可供追蹤的特征點,傳感器的定向和周圍物理環境的結構就能被快速解讀。
舉個例子,汽車設計的過程中,SLAM 會調用單個或多個前向攝像頭、雷達、激光雷達和慣性測量單元(IMUs,提供加速計和陀螺儀數據,用于預估傳感器定向),判斷汽車在當前環境的運動模式。GPS 數據可用時,也將被用于驗證之前的位置預估是否準確。
圖 2 展示了車身裝配的多種傳感器,包括攝像頭、雷達和激光雷達等。這些傳感器都可以作為 SLAM 的數據來源。
SLAM 應用
SLAM 是駕駛員輔助系統和自動駕駛汽車上多種應用的關鍵。包括且不限于:
車道保持輔助(和車道偏離預警):除了追蹤車道標識,SLAM 也可以確保汽車在同一車道內駕駛,并在變道時保證安全。
導航:通過判斷周圍環境,并結合預先規劃的路徑和 GPS 數據,汽車可以利用 SLAM 自我導航至目的地。
前方碰撞預警(FCW):聯合 SLAM、汽車當前所處的道路或運行軌跡將被用于更可靠的碰撞預警。
SLAM 的市場趨勢
如圖 3 所示,SLAM 相關應用市場的規模預計將于 2024 年超過 20 億美元【1】。增長的主要推手是 SLAM 算法的演進和在多個細分市場的增長。持續的技術開發和對 SLAM 優勢意識度的上升是市場需求增加的主要動力。自動駕駛汽車和增強虛擬現實等行業對這項技術不斷提高的興趣也促進了 SLAM 在全球的采納和擴張。

圖 3:SLAM 技術相關市場預計將于 2024 年超過 20 億美元
不止于此,SLAM 正在被用于室內和戶外環境的導航應用,進一步推動這一技術在多個終端用戶行業的大規模采納。過去 5 年間,領先的科技公司顯著加大對 SLAM 的投資,并將其作為新產品開發和并購等業務擴張戰略的一部分進行考量。
SLAM 的實現條件
圖 4 展示了 SLAM 的一般性流程。
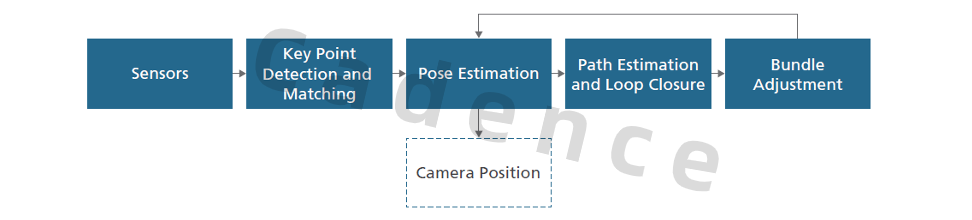
圖 4:SLAM 處理流程圖
圖中每個區塊的實現都是基于傳統的計算機視覺(Computer Vision)。不同之處在于,它們非常依賴多種不同的線性代數和矩陣運算,承擔了繁重的計算任務,且可以實現于 CPU 或 GPU。
對一般性使用和原型設計來講,CPU 是很不錯的選擇,但它的性能和能力有限。首先,用于并行處理的單指令多數據流(SIMD)通道數量較少;其次,功耗效率不高。這兩條導致 CPU 不是大規模應用的最佳選擇,甚至在某些場景下,CPU 都無法滿足 SLAM 的實時性要求。
GPU 則在計算能力方面提升了一個臺階。它具有多種適合并行處理的模態,可協助實現高性能,并滿足即時性需求。但萬物皆有兩面性,GPU 是耗能巨獸,功耗巨大。而且,僅僅憑借這一條處理上的優勢就想說服 SoC 供應商在有限的布局規劃空間額外增加 GPU 所需組件也不太現實。
專屬 DSP 大展身手的時機終于到了。DSPs 具備高度可編程的特性,面積小,是多個細分市場大規模部署設備量產的理想選擇。
Tensilica Vision Q7 DSP
Cadence Tensilica Q7 DSP 是為了實現 SLAM 在邊緣及其他設備的高性能而專門設計的。Vision Q7 DSP 已經是 Tensilica 家族的第六代視覺與 AI DSPs 產品。Cadence 對它的指令集進行了優化,使其擁有更高的矩陣運算、特征提取和卷積運算性能,是迄今性能最高的視覺 DSP,并具備在邊緣設備運行 SLAM 應用所必須的高性能與低功耗間的完美平衡。
圖 5 展示了 Cadence Tensilica Q7 DSP 的架構和關鍵特性。
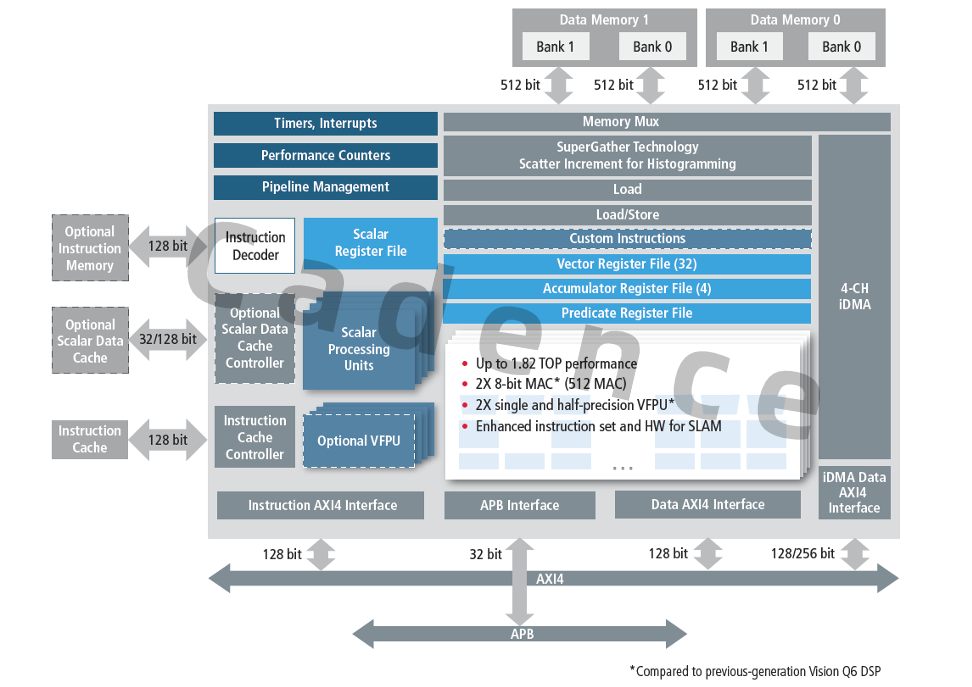
圖 5:Tensilica Vision Q7 DSP 架構
Tensilica Vision Q7 DSP 的高級特性如下:
● 512 MAC(8 位)處理
● 64 路 SIMD VLIW 處理器
● 1024bit 存儲接口
● 矢量浮點單元(vFPU)的性能是上一代 DSP 的 2 倍
● 擁有 4 通道的集成 3D DMA
● SLAM 性能加速選項可選
● 運算速度最高可達每秒 2 萬億次運算(TOPS)
此外,Vision Q7 DSP 的設計已通過 ISO 26262 認證,是汽車應用的絕佳平臺。下方是將與多種傳感器連接的 Vision Q7 DSP 用于 SLAM 運算的典型架構圖。
Vision Q7 DSP 也可以用于實現多種去中心化和分布式的系統。DSP 可被布置在靠近傳感器的位置,在到達 CPU 之前對數據進行處理,緩解對存儲器帶寬的需求,同時減少數據傳輸量。這一方法通常被用于汽車等復雜系統,以滿足新一代應用的安全關鍵和高性能需求。
便捷的開發流程和配套工具
除了已經獲得 Tensilica Xtensa Xplorer 開發環境的全面支持,Vision Q7 DSP 還可以充分利用已經非常成熟且進行了高度優化的 Cadence Xtensa Imaging Library 圖像庫。受到 OpenCV(C++語言計算機視覺庫)的啟發,Cadence 將多種 OpenCV 函數進行了移植,且沿用了類似的函數名稱和 API,讓 OpenCV 移植過來更加平滑、容易。
Vision Q7 DSP 也已經獲得 Tensilica Neural Network compiler 神經網絡編譯器的支持。Tensilica 神經網絡編譯器將神經網絡結構圖編譯成 Vision Q7 DSP 可執行、高度優化的高性能代碼,這些代碼充分利用了優化神經網絡庫中豐富的函數集。
性能比較
基于單攝像頭數據源,Cadence 在公司內部做了 VSLAM 的實現測試,并獲得了 SLAM 流水線上不同區塊在 Vision Q7 DSP 和 Vision Q6 DSP(Q7 的前代產品)的相關數據(見圖 7)。
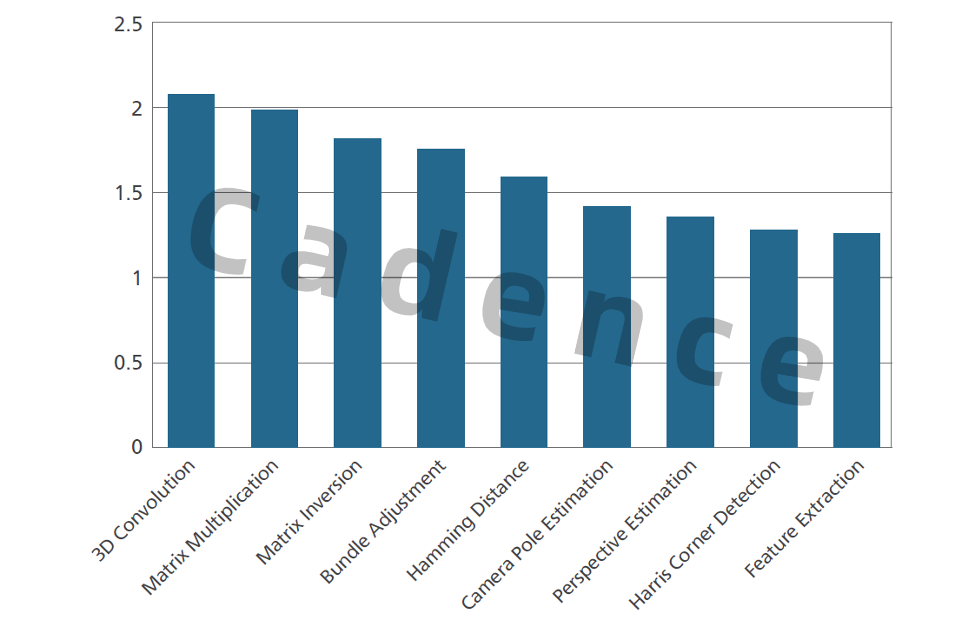
圖 7:Vision Q7 DSP 與 Vision Q6 DSP 的速度對比:在 SLAM 不同功能塊上均有 2 倍提升
對比 Vision Q6 DSP,Vision Q7 DSP 的測試結果在 SLAM 流程管線的不同功能塊均顯示了接近 2 倍的性能提升。優化的指令集,更優的封裝,以及數量更多的 MACs 讓攝像頭位置預估的精度更高,使用 Vision Q7 DSP 加速 SLAM 相關應用的體驗也更好。除了性能提升,Vision Q7 DSP 占用的面積和 Vision Q6 DSP 完全一致,且能耗更低,是未來產品的理想選擇。
結論
本文中,我們介紹了 SLAM 概念,談及了將 Vision DSP 用于汽車應用的設計實現方法。我們也比較了 Vision Q7 DSP 與其前代產品 Vision Q6 DSP 的差別,以及對 SLAM 不同模塊的性能提升。
本文也講述了如何用純粹的計算機視覺技術實現 SLAM 的工作流程。就在最近,通過集成多種卷積神經網絡(CNN)層來增強特征點匹配和特征提取也取得了一些進展。Cadence Tensilica Q7 DSP 支持最新神經網絡運算所需的各種 layer,讓同一 DSP 上融合視覺和 AI 成為可能。
總而言之,視覺處理和 AI 的完美牽手是將新一代 SLAM 相關應用推向汽車市場的關鍵。
原文標題:即時定位與地圖構建(SLAM)和自動駕駛汽車:DSP 的設計實現之旅
文章出處:【微信公眾號:Cadence楷登】歡迎添加關注!文章轉載請注明出處。
責任編輯:haq
-
dsp
+關注
關注
552文章
7962瀏覽量
348308 -
SLAM
+關注
關注
23文章
419瀏覽量
31789 -
自動駕駛
+關注
關注
783文章
13694瀏覽量
166166
原文標題:即時定位與地圖構建(SLAM)和自動駕駛汽車:DSP 的設計實現之旅
文章出處:【微信號:gh_fca7f1c2678a,微信公眾號:Cadence楷登】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
計算機視覺有哪些優缺點
計算機視覺的工作原理和應用
計算機視覺與智能感知是干嘛的
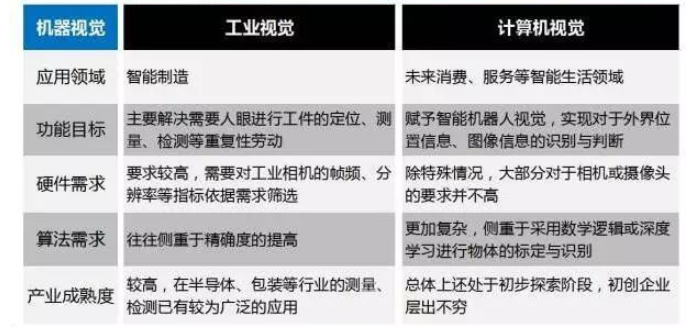
機器視覺與計算機視覺的區別
計算機視覺的主要研究方向
計算機視覺的十大算法

工業視覺與計算機視覺的區別





 工商網監
工商網監
評論