 激光雷達中三角測距與ToF測距的原理及比較
激光雷達中三角測距與ToF測距的原理及比較
當研發人員對機器人搭載的激光雷達進行技術選型時,往往會發現同樣是機械式單線雷達,不同廠家的不同型號在外觀、性能參數和價格區間上差別巨大,容易產生疑惑,不確定哪種更適合自己的使用場景。
這主要是由于目前市場上機械式激光雷達使用了不同的測距原理,主要可分為三角測距和ToF測距兩類,使得雷達整體設計在尺寸、性能和成本上有較大差異。
接下來將為大家詳細介紹兩類測距方式的技術原理,幫助研發人員加深理解,從而選擇更適合自身場景的激光雷達方案。首先來看三角測距激光雷達。
這種測距方式的基本原理如圖1所示。雷達測距模塊向外發射紅外激光,入射到被測物體上之后,部分散射光經接收透鏡匯聚到線陣圖像傳感器(CCD/CMOS)上成像。
由圖中的幾何關系可知,位于不同距離的物體,出射激光形成的光斑在線陣上成像的位置亦不相同;另一方面,測距模塊的內部結構固定不變,接收透鏡的焦距f,以及發射光路光軸與接收透鏡主光軸之間的偏移(即基線距離)L這兩項參數都是已知的。根據三角形的相似關系,即可計算出物體的距離D如下:
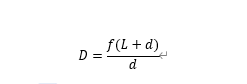
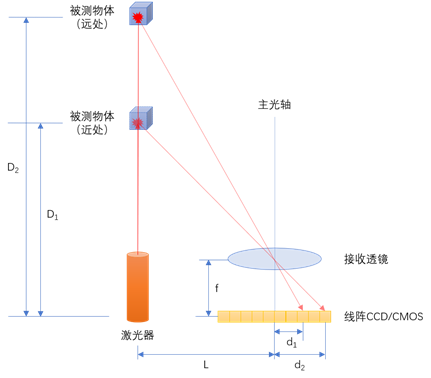
圖1 三角測距基本原理
以上原理介紹為最簡化的情況。在實際應用中,為了提高距離分辨率,以及充分利用線陣圖像傳感器的像素資源,通常將發射光路光軸與接收透鏡主光軸布置為呈一定斜角(而非圖示中的平行關系),但相似三角形的基本原理并無變化。
三角測距的原理決定了使用這種測距方式的激光雷達的一些技術特點。
首先來看測量距離,對于三角測距激光雷達來說,這個參數和距離分辨率是緊密聯系的。所謂距離分辨率,就是對不同距離目標的區分能力;換句話說,當目標的距離發生變化時,變化量達到多大才能使雷達輸出的距離值發生變化,相當于用尺子量長度時,使用的尺子的最小刻度是多少,三角測距的一大特點是這把“尺子”的刻度是不均勻的。
由圖1易知,對于比較近的距離區間,目標距離的變化會引起成像點位置的顯著變化;而當目標位于遠處時,即便距離發生很大的變化,體現到成像點上只會產生一點點移動,也就是說,三角測距的距離分辨率會隨著距離的變遠而急速下降。這就限制了三角測距的最大實用測量距離,超出了這個距離后,分辨率的下降將使得測量結果失去意義。
其次是測量速率。機械式單線激光雷達在旋轉掃描的同時對不同方向上的目標進行測距,因此測量速率直接決定了雷達能否以更快的速率掃描(對應更高的幀率),以及在完成一周掃描時能否輸出更多的測量點(對應更高的角度分辨率)。
為了達到一定的距離分辨率,三角測距激光雷達往往都會使用較高分辨率的線陣圖像傳感器,通常具有數千個像素點,每次測距時需要將這些像素點的灰度值讀出并交給DSP處理,整個讀出和處理的過程需要耗費一定時間,從而限制了三角測距激光雷達的數據速率。
說完三角測距之后,接著再看ToF測距。ToF是Time of Flight的縮寫,也即飛行時間測距法,其基本原理如圖2所示:
開始測距時,脈沖驅動電路驅動激光器發射一個持續時間極短但瞬時功率非常高的光脈沖,同時計時單元啟動計時;
光脈沖經發射光路出射后,到達被測物體的表面并向各方向散射。測距模塊的接收光路收到部分散射光能量,通過光電器件轉化為光電流,輸送給回波信號處理電路;
回波信號處理電路將光電流轉化為電壓信號,經過一級或數級放大并調理后,得到一個回波信號對應的電脈沖,用于觸發計時單元停止計時;
此時,計時單元記錄的時間間隔就代表了激光脈沖從發射到返回的全程所用的時間,使用這個時間值乘以光速并除以2,即可得到測距單元與被測目標之間的距離值。
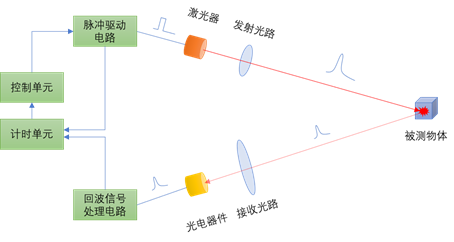
圖2 ToF測距基本原理
ToF測距的原理很容易理解,但具體工程實現時有不少技術難點需要解決,這主要是由于ToF測距的工作條件比較極端,非常大(脈沖發射峰值)、非常弱(脈沖回波)和非常快(納秒/皮秒級別)的信號,這就對整個電路的驅動能力、帶寬和噪聲抑制水平提出了很高的要求。但它的優勢在于,只要解決了上述這些問題,整個測距系統可以實現非常高的性能。
從測量距離來看,由于ToF測距發射的是持續時間極短的激光脈沖,因此在符合人眼安全要求的前提下,可以把光脈沖的瞬時功率提到很高的水平,從而能夠探測到更遠距離的目標。
不同于三角測距基于幾何相似關系的測量原理,ToF通過測量光脈沖的飛行時間來計算目標距離,而計時的精度不會因距離變遠而發生改變,這樣在整個量程內,ToF測距的距離分辨率都不會有實質性的變化。最后,ToF測距處理的都是高速脈沖信號,由此而來的好處是整個測量過程耗時極短,可以很輕松地做到非常高的測量頻率。
說完三角測距和ToF測距的工作原理后,接下來很自然的一個問題是,哪種類型的單線激光雷達更具優勢?答案是要根據每種雷達的特點,結合具體的使用場景來看。
三角測距激光雷達的優勢主要體現在成本上,因其設計方案成熟,批量生產時成本可以降到很低的水平,但由于其在實際使用過程中并不穩定,導致其在工業領域的應用受到很大限制。
此外,因為三角測距使用并列布置的平行軸光路,雷達的外觀可以做得比較低矮,能夠用于機體高度受限的場合;這些優勢,結合三角測距近距離測量精度較高的特點,使得三角測距激光雷達非常適合于消費級產品上使用,近年來逐漸普及的掃地機器人就是一個很好的例子,只要是具備導航功能的型號,幾乎清一色地使用了三角測距激光雷達作為主傳感器方案。對于服務機器人類的產品,當活動場景不大,或者需要在近距離補盲避障時,三角測距激光雷達亦有應用案例。
ToF測距激光雷達的系統設計,相比三角測距雷達更復雜,因此成本會高一些,但由此帶來的性能提升也是顯而易見的,目前有不少團隊的在研ToF方案,可在保持ToF測距工業級穩定性和高性能的基礎上,將整機成本降到較低的水平,從而有潛力替代三角測距激光雷達在消費領域的應用。
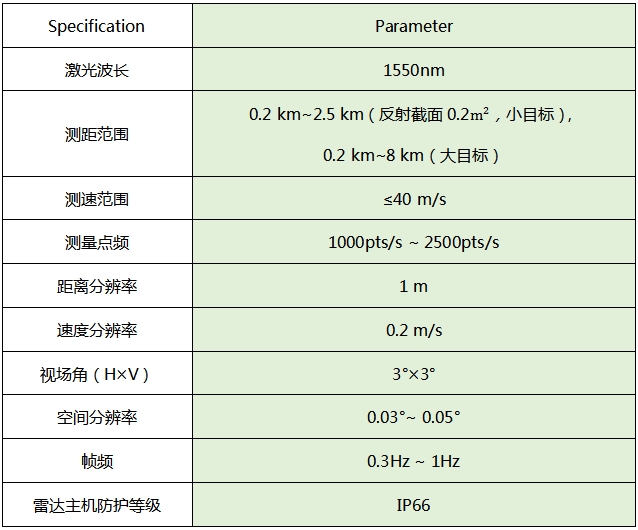
市面上ToF單線激光雷達的主流產品,其最大測量距離(針對70%反射率目標)通常10米起步,數據速率達到15 KHz或更高,掃描頻率從15 Hz到40 Hz不等,且不少型號都可以在室外使用,因此環境適應性更好,非常適合于活動空間大、移動速度高、需要在較強環境光(例如室外)工作的移動平臺。目前,ToF測距激光雷達在服務機器人、AGV/AMR、低速物流車都有普遍的應用。此外,在一些靜態安裝的場合,例如工業安全防護、大屏互動、安防監控等領域,也常常能看到ToF測距激光雷達的使用。
編輯:lyn
-
傳感器
+關注
關注
2548文章
50690瀏覽量
752032 -
激光雷達
+關注
關注
967文章
3940瀏覽量
189602 -
三角測距
+關注
關注
0文章
19瀏覽量
727
發布評論請先 登錄
相關推薦
物聯網系統中的高精度測距方案_單點TOF激光雷達

引爆行業熱潮,飛芯電子相干4D FMCW無人機偵測激光雷達震撼發布!
又一廠商展出FMCW激光雷達,從PPT走向樣品
激光雷達選型秘訣,五大要素助您輕松決策


硅基片上激光雷達的測距原理

激光雷達LIDAR基本工作原理

【核桃派1B 開發板試用體驗】激光聲納雙雷達對比測試
闡述基于激光三角測距法的激光雷達原理

基于激光三角測距法的激光雷達原理

什么是激光雷達?LiDAR系統的工作原理及解決方案








 工商網監
工商網監
評論