 基于2.4G無線通信和CAN總線技術實現汽車故障診斷儀的設計
基于2.4G無線通信和CAN總線技術實現汽車故障診斷儀的設計
設計一款基于2.4G射頻的車栽CAN總線故障診斷儀,詳細介紹其工作原理及系統硬件電路,最后分別闡述接收端、發射端和PC端的軟件模塊。該方案采用自動跳頻的2.4G空中協議,經測試統計誤碼率保持在有效范圍之內,在14m內仍能正常工作。采用USB作為接收端和PC接口,保證了系統的即插即用及數據的高速傳輸。
控制器局域網絡CAN(Controller Area Network)為汽車內部各種復雜的電子設備、控制器、測量儀器等提供了統一數據交換渠道,已得到廣泛的應用。目前,太多數汽車部件都提供了CAN總線通信接口。
在當今的中高檔汽車中,都采用了CAN總線技術。針對車載CAN總線會出現的故障.結合射頻和USB的優點,依靠KWP2000應用層規定的故障代碼,本文提出了一種基于車載CAN總線故障診斷儀設計方案。本方案成本低廉,攜帶方便,具有很強的靈活性與適應性。
1 方案設計
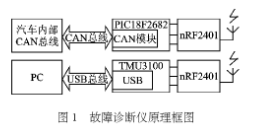
系統總體設計框圖如圖l所示。系統分為發射端和接收端兩部分。
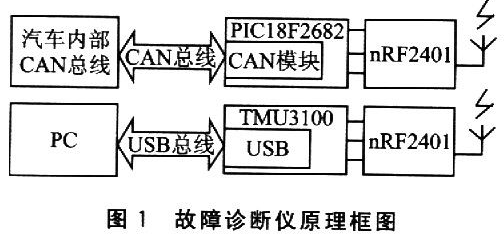
由于采用射頻技術,使汽車CAN總線數據采集部分和CAN總線數據診斷部分得以分離,無需連線,不受空間場地限制,安裝攜帶方便。按照ISO有關標準,CAN總線傳輸速率最高可達1 Mbps;但由于汽車內部特殊環境,車載CAN總線速率一般在250 kbps。本系統中射頻速率最高可達l Mbps,可以很好地滿足數據傳輸要求。
發射端采用USB作為接收模塊和PC接口。USB與RS232或PCI接口相比,具有用戶使用方便,設備自動識別,自動安裝驅動程序和配置,支持動態接入和動態配置等優點;其傳輸速率可達幾十Mbps,并且支持同步和異步傳輸方式,保證帶寬,傳輸失真小。
PC端應用層軟件整合KWP2000的應用層協議。KWP2000是由瑞典制定的一種車載故障診斷協議,已在微機控制的自動變速器、防抱死制動系統、安全氣囊、巡航系統中得到廣泛應用。它基于OSI七層協議,符合IS07498標準。其中第1“6層實現通信服務的功能,第7層實現診斷服務的功能。其應用層提出了一套完整和標準化的診斷代碼,本系統利用KWP2000的應用層協議,對采集到的CAN總線數據進行分析,以實現故障診斷的功能。
2 硬件實現
2.1 系統所用芯片簡介
2.1.1 nRF2401芯片
nRF240l是單片射頻收發芯片,工作在2.4~2.5GHz ISM頻段;內置頻率合成器、功率放大器、晶體振蕩器、調制器和標準SPI等功能模塊;輸出功率和通信頻道可通過軟件進行配置,共有125個頻道可使用,而且最高速率可達l Mbps。芯片具有1.9~3.6 V寬工作電壓,工作能耗非常低。當以一5 dBm的功率發射時,工作電流只有10.5 mA;接收時,工作電流只有18 mA。
nRF240l有4種工作模式:收發模式、配置模式、空閑模式、關機模式。其工作模式由PWR_UP、CE、CS三個引腳和配置字節最低位TX_EN來決定。
收發模式分為DirectMode和ShockBurst。前者在片內對信號不加任何處理,與其他射頻收發器相同。后者使用片內FIFO堆棧,數據從MCU低速送入,但高速發射,而且與射頻協議相關的所有高速信號處理都在片內進行。例如,nRF240l在ShockBurst收發模式下自動處理字頭和CRC校驗碼,在接收時自動把包頭和CRC校驗碼移去;在發送數據時自動加上字頭和CRC校驗碼。
2.1.2 TMU3100芯片
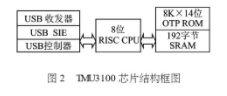
TMU3100是臺灣Tenx公司2005年推出的RISC內核的單片機。它嵌入了完全兼容USBl.1協議的USB控制器,并且提供了低速USB接口和3個端點,其中1個控制輸入/輸出端點和2個中斷輸入端點。
TMU3100可以配置為標準的HID類,可以使用Windows操作系統自帶的HID類驅動程序。這樣可以省去開發設備驅動程序的工作,縮短開發周期。TMU3100芯片結構框罔如圖2所示。
2.1.3 PICl8F2682芯片
PICl8F2682是Microchip公司新推出的8位低功耗CAN微控制器,主要資源有:內置標準CAN模組、80KB閃存程序存儲器、1 KB數據E2PROM、3.3 KBRAM存儲器、8通道ADC、1個8位和3個16位T1MER、1個SPI和I2C串行通信端口和可編程欠壓復位功能及低電壓檢測電路。
PIC18F2682內置增強型的CAN總線模塊,該模塊包含CAN協議引擎、信息緩沖和信息控制。CAN協議引擎自動處理CAN總線上所有接收和發送的消息,它可以在接收或發送信息時對數據幀進行解析。只需要首先設置適當的寄存器就可以發送信息,通過相關的寄存器即可得到信息傳輸的狀態。
2.2 硬件電路
2.2.1 發射端電路原理
圖3是系統發射端電路原理。CAN總線接口使用Microchip公司內置CAN模塊的PIC18F2682單片機,并由光耦6N137進行總線隔離;CAN總線收發器采用MCP2551。
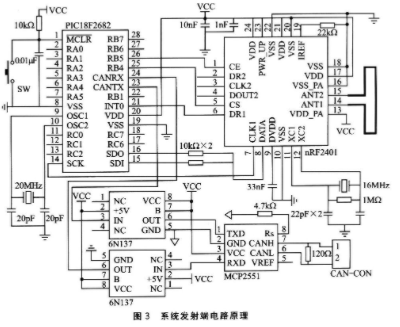
PIC18F2682與射頻芯片nRF2401之間通過標準SPI接口SCK、SDI、SDO來完成,這樣可以大大提高發送速率。對nRF2401配置控制使能CS和接收、發送使能CE分別由RB4和RB5進行控制。當nRF240l接收到數據包時,DRl將被置高電平,因此PICl8F2682通過查詢INT0的狀態可以判斷是否接收到數據。
2.2.2 接收端電路原理
圖4是系統接收端電路原理。由于TMU3100由PC供電,而PC機USB接口所提供的電壓VDD干擾較大,故對VDD進行了π濾波。
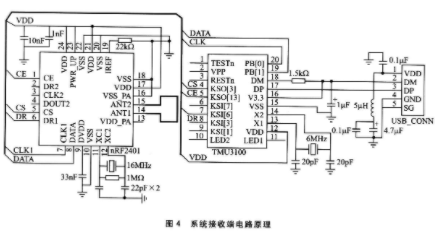
由于TMU3100沒有SPI模塊,故可以通過PB、PB[0]按照SPI協議與nRF2401的SPI口來進行通信。對nRF2401配置控制使能CS和接收、發送使能CE分別由KSO和KSO[13]控制。nRF2401接收到數據包后,DRl將被置高電平,因此TMU3100可以通過查詢KSl6的狀態判斷足否接收到數據。
3 軟件設計
系統的軟件設計包括發射端軟件設計、接收端軟件設計和PC端軟件設計。
3.1 發射端軟件設計
發射端流程如圖5所示。軟件設計主要實現兩項功能:第一是實現CAN總線上數據的采集;第二是實現將采集后的數據通過射頻進行發射。
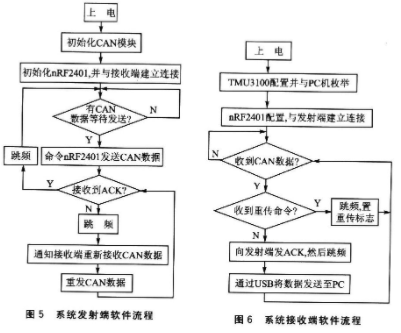
上電后,首先對CAN模塊進行初始化。然后初始化nRF2101,并與接收端建立連接。當發送完CAN數據后沒有收到ACK信號時,就跳頻;然后通知發送端準備接收重發的CAN數據,直到接收到ACK信號。
為了防止空中干擾,采用了自動跳頻的空中協議,即無論是否接收到ACK信號都進行跳頻,因此可以防止某個頻段的強干擾,進而降低誤碼率。
3.2 接收端軟件設計
接收端軟件流程如圖6所示。軟件設計主要實現兩項功能:第一是實現枚舉;第二是實現將接收到的數據通過USB上傳到PC。上電后,首先完成對TMU3100的配置,并與PC機枚舉;枚舉成功后就對nRF2401進行配置,并與發射端建立連接。當接收到數據包后,首先判斷是CAN數據還是重傳數據命令。如果是CAN數據包,則向發射端返回ACK信號并跳頻,然后將接收到的數據通過USB傳至PC;如果是重傳命令,則先跳頻,然后置重傳標志,表示下個數據包是重傳的數據包。
TMU3100被配置為標準HID類,這樣就不用為設備開發驅動程序,而是使用Windows提供的標準HID類驅動程序。
3.3 PC端軟件設計
PC端軟件由應用程序和設備驅動程序組成。Windows為標準USB沒備提供了完善的內置驅動,本系統采用Windows自帶的HID類驅動,只要將TMU3100配置為HID類,即可完成與PC機的通信。這省去了開發設備的驅動程序,極大地簡化了上位機軟件的開發。
上位機的應用程序首要實現的功能是,要實現對TMU3100端點的讀寫,用VC++語言編寫,可以把USB設備當成文件來操作。用CreateFiile()函數獲得USB句柄,為讀訪問或寫訪問打開指定端點。用DeviceControl()來進行控制操作,用ReadFile()從指定端點讀取數據,用WriteFile()向端點寫入數據。
當CAN總線上的數據被采集到PC后,就可以進行故障診斷了。故障診斷代碼是依照KWP2000應用層規定的故障代碼設計的,是目前國際上通用的,現將其應用于CAN的應用層,將來可以用全新的CAN上層協議取代。故障診斷代碼定義在SSF14230中。SAE J1979中,由車輛制造商或系統供應者定義的服務標志符數值的不同范圍,如表1所列。
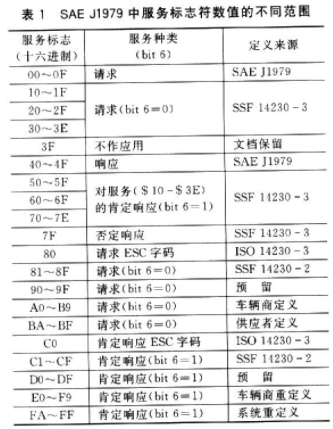
此表中以十六進制數表示的服務標志符,同數據鏈路層中數據字節內的SID服務識別字節對應。不同的SID值代表不同的服務請求,故障診斷程序必須符合此應用層標準,才能識別不同的十六進制代碼所代表的不同的故障信息。
4 結論
本文設計的2.4G無線車載CAN總線故障診斷儀,由于采用了自動跳頻的空中協議,所以誤碼率幾乎接近零,在14 m內仍能進行可靠的工作。系統使用國際上通用的診斷代碼,使程序具有通用性和實用性;以PC作為硬件平臺,無需專門開發硬件平臺,可大大降低開發成本并且易于實現設備的升級和維護;使用USB接口和2.4G無線通信,具有即插即用、不受空間限制、數據傳輸實時性強的特點。
責任編輯:gt
-
單片機
+關注
關注
6032文章
44521瀏覽量
633113 -
CAN總線
+關注
關注
145文章
1936瀏覽量
130633 -
無線通信
+關注
關注
58文章
4521瀏覽量
143419
發布評論請先 登錄
相關推薦
CAN總線汽車故障診斷儀怎么設計?
怎么設計一款基于C8051F020單片機的汽車故障診斷儀?
如何設計一款基于2.4G射頻的車栽CAN總線故障診斷儀?
2.4G無線通信是什么
基于R8C的汽車OBD通用故障診斷儀設計
基于車載CAN總線故障診斷儀設計方案

基于汽車CAN總線在線診斷儀的應用
基于CAN總線結合射頻和USB實現車載故障診斷儀的設計方案





 工商網監
工商網監
評論