 基于PIC16F639單片機實現智能PKE應答器的設計
基于PIC16F639單片機實現智能PKE應答器的設計
免持式被動無鑰門禁(PKE)正迅速成為汽車遠程無鑰門禁應用的主流,并成為新車型的普遍選項。該方法無需用手按發送器按鈕來鎖上或打開車門,只要擁有一個有效的應答器就可方便地進出車輛。
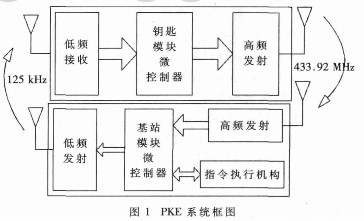
免持式PKE應用要求基站和應答器單元之間進行雙向通訊。車輛內的基站單元發出一個低頻(LF)命令,搜尋周圍的應答器。一旦車主的應答器被搜索到,該應答器隨即自動回應基站單元。基站單元在收到有效的驗證響應信號后打開車門。
在典型的PKE應用中,將基站單元的輸出功率設計為政府機構規定的電磁輻射標準所允許的最大功率。當工作于9V到12V直流電源下時,可達到的最大天線電壓約為300V峰峰值。由于低頻信號(125kHz)的非傳播特性,距離發送基站單元約兩米外的典型鑰匙扣應答器所接收到的信號電平只有約幾個mV峰峰值。另外,由于天線的方向特性,如果天線沒有朝向基站天線,應答器的輸入信號電平會非常弱。
若PKE無法正常運行,最可能的原因是應答器輸入信號電平太弱。因此,為讓免持式PKE應用可靠工作,輸入信號在任何期望的通訊范圍內都應足夠強(高于輸入靈敏度電平)。為使PKE系統可靠,系統設計工程師必須考慮基站命令信號的輸出功率、應答器的輸入靈敏度、天線的方向性以及應答器的電池使用壽命這四個重要參數。
PIC16F639是一款帶三通道模擬前端(AFE)的MCU,其模擬前端特性由MCU固件控制。由于使用方便,該器件可用于多種智能低頻檢測和雙向通訊應用中。本文討論了利用PIC16F639 MCU實現智能PKE應答器的設計電路示例,并給出了電路中的MCU固件示例。設計工程師可以很方便地根據用戶的特定應用對這些電路和MCU固件進行修改。
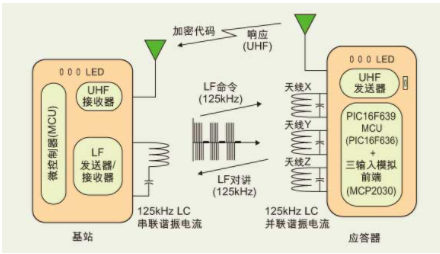
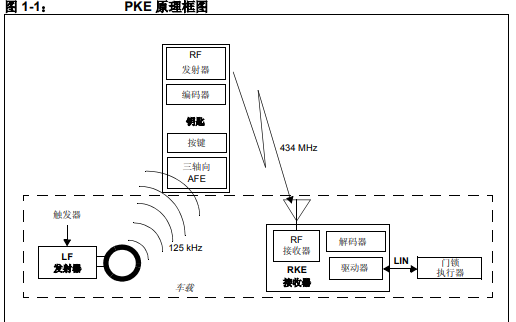
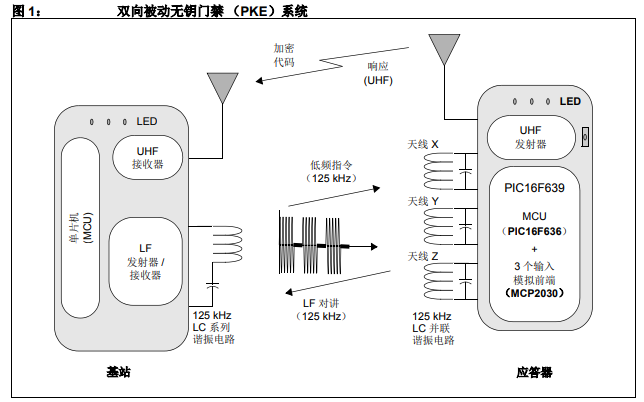
圖1:采用雙向通信的智能被動無鑰匙門控(PKE)系統。
PIC16F639 PKE應答器
PIC16F639包括數字MCU部分(PIC16F639內核)和模擬前端(AFE)部分,可用于多種低頻檢測和智能雙向通訊應用。圖1為一個典型的PKE系統示例,基站單元發出一個125kHz的命令信號,搜尋周圍有效的應答器。如果接收到的命令有效,PKE應答器將返回一個響應信號。
PIC16F639器件的模擬輸入靈敏度很高(高達1mV峰峰值),具有三個天線連接引腳。通過連接指向X、Y和Z方向的三個天線,應答器可隨時接收來自任意方向的信號,從而降低由天線的方向性而造成信號丟失的可能性。各天線引腳的輸入信號的檢測是相互獨立的,并隨后相加。通過對配置寄存器進行編程,每個輸入通道可以被單獨使能或禁止。被使能的通道越少,器件的功耗就越小。
為實現免持操作,應答器連續等待并檢測輸入信號,這會減少電池使用壽命。因此,為減小工作電流,在模擬前端(AFE)搜尋有效輸入信號的同時,數字MCU部分可以處于低電流模式(休眠模式)。只有當AFE檢測到有效輸入信號時,數字MCU部分才被喚醒。通過使用一個輸出使能濾波器(喚醒濾波器)可實現這個功能。PIC16F639具有9個輸出使能濾波器選項。用戶可利用配置寄存器對濾波器進行編程。濾波器一旦被編程,則只有在輸入信號達到濾波器要求時,器件才將檢測到的輸出傳送到數字部分。
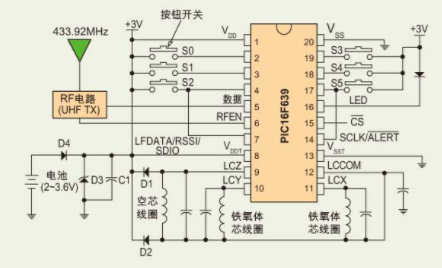
圖2:被動無鑰門禁(PKE)應答器的配置電路圖。
圖2為PKE應答器的配置示例。這個應答器包括PIC16F639器件、外部LC諧振電路、按鈕、UHF發送器、后備電池(可選)和3V鋰電池。
數字部分有PORTA和PORTC兩個I/O口。每個PORTA引腳都可被單獨配置為電平變化中斷引腳,而PORTC各引腳沒有電平變化中斷的功能。AFE部分共用數字部分PORTC的RC1、RC2和RC3三個I/O引腳,這些引腳在內部分別連接到AFE的CS、SCLK/ALERT和LFDATA/CCLK/RSSI/SDIO焊盤上。LFDATA/CCLK/RRSI和ALERT為AFE輸出。SDIO、SCLK和CS被用來編程或讀取AFE配置寄存器。
為節省電池能量,AFE部分在檢測LF輸入信號的同時,數字部分通常處于休眠模式。盡管AFE的輸出焊點在內部連接到PORTC引腳,但由于PORTC引腳不是電平變化中斷引腳,所以AFE輸出無法通過電平變化中斷事件喚醒數字部分。因此,建議將AFE的LFDATA和ALERT引腳在外部連接到PORTA引腳,如圖2所示。
數字部分在出現以下三種情況之一時被喚醒:LFDATA引腳有AFE輸出;ALERT引腳有AFE輸出;按下PORTA上的開關按鈕事件。
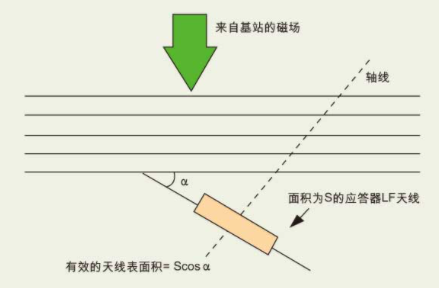
圖3:由于天線的方向性,在實際應用中,兩個天線平行時檢測距離最大,正交時檢測距離最短。
外部LC諧振天線
PIC16F639器件具有三個低頻輸入通道。LCX、LCY和LCZ引腳用于連接(每個LF輸入通道的)外部LC諧振天線電路。外部電路連接至天線輸入引腳及LCCOM引腳。對所有外部天線電路而言,LCCOM是共用引腳。當內部檢測電路檢測到強輸入信號時,建議在LCCOM引腳與地之間接一個電容(1~10μF),以提供穩定的工作狀態。
盡管PIC16F639有三個LC輸入引腳與三個外部天線連接,但根據具體應用,用戶可以只用一個或兩個天線,而不是同時使用三個天線。工作電流消耗與使能的通道數成正比,使能的通道越少,消耗的電流越小,但強烈建議在免持式PKE應用中使用所有三個天線。
為檢測低頻磁場,通常要使用調諧環型天線。為使天線電壓最大,環型天線必須精確調諧到所需的頻率。對于PKE應用,應將天線調諧到基站載波頻率。環型天線由構成并聯LC諧振電路的一個線圈(電感)和幾個電容組成。通過增大環路表面積和電路的品質因數(Q)使天線電壓最大。
LC諧振電路的諧振頻率由式1給出:
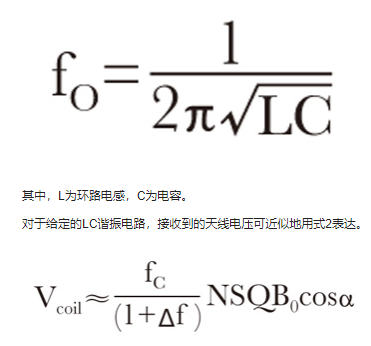
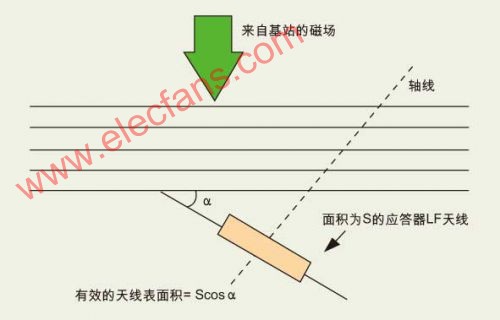
其中,fc=基站載波頻率(Hz);△f= |fc-fo|;fo=LC電路諧振頻率(Hz);N=環路線圈的匝數;S=環路表面積(m2);Q=LC電路品質因數;Bo=磁場強度(韋伯/平方米);α=信號到達的角度。
在式2中,品質因數(Q)是衡量調諧電路的頻率選擇性的指標。假設電容在125kHz時無損耗,則LC電路的Q值將主要由電感決定。

式中fo為調諧頻率,L為電感值,r為電感的阻抗。
在典型應答器應用中,電感值的范圍在1~9mH之間。對于空芯電感,LC電路的Q值大于20,對于鐵氧體磁芯電感,Q值約為40。
式2中的Scosα項代表天線的有效表面積,即為環路處于入射磁場中的面積。當cosα等于1時,天線有效表面積最大,此時基站和應答器單元的天線面對面。在實際應用中,兩個天線平行時檢測距離最大,正交時檢測距離最短。圖3用圖形闡述了實際應用中的天線方向問題。
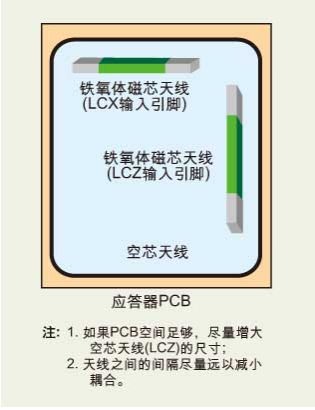
圖4:推薦的應答器電路板天線布局圖。
如果三個天線在同一印刷電路板上的位置相互正交,可大大減少天線方向問題。在實際應用中,這種設計會提高任何時刻至少有一個應答器天線朝向基站天線的概率。圖4為應答器電路板上布置三個天線的圖示。LCZ使用一個大空芯線圈,LCX和LCY使用兩個鐵氧體磁芯線圈。有些公司專門生產125 kHz RFID和低頻檢測應用系統使用的鐵氧體線圈。
如式2和式3所示,當LC電路準確調諧到入射載波的頻率時,線圈上的感應電壓最大。但在實際應用中,由于LC元件的容差不同,各個應答器的LC諧振頻率也不同。為補償元件容差帶來的誤差,PIC16F639的每個通道都有一個內部調諧電容組。電容值可以以1pF為步長,被編程到最大63pF,電容值隨配置寄存器位的增加而單調遞增。
可通過監測RSSI電流輸出對電容進行有效調諧。RSSI輸出與輸入信號強度成正比,因此LC電路被調諧得與載波頻率越接近,監測到的RSSI輸出越高。總電容值隨著配置寄存器位升高而增加,由此得到的內部電容被疊加到LC電路的電容上。隨內部諧振電容的增加,LC諧振頻率將降低。
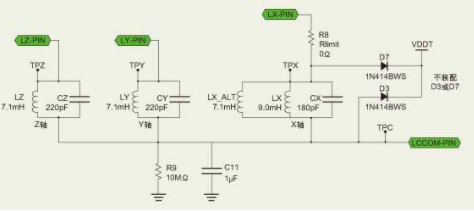
圖5:應答器電路的每個諧振天線必須調諧到基站單元的載波頻率,以達到最佳信號接收狀態。
后備電池與無電池模式
實際應用有可能發生電池意外地暫時脫離電路的情況,例如當應答器掉落到硬質表面上時。如果發生此種情況,存儲在MCU中的數據可能無法正確恢復。為避免電池意外脫離,用戶可考慮采用后備電池電路。后備電池電路能向應答器暫時提供VDD電壓。建議在精密應答器中采用這種電路,但并不是所有應用都必須采用它。在圖2中,D4和C1構成了電池后備電路。當電池連接時,C1被完全充電,當電池短暫斷開時,C1提供VDD電壓。
當應答器處于無電池運行時稱為無電池模式。在圖2中,二極管D1、D2、D3和C1構成無電池模式的電源電路。當應答器線圈產生電壓時,線圈電流流過二極管D1和D2為C1充電,C1可為應答器提供VDD電壓。當PIC16F639用于需要無電池運行的防碰撞應答器應用中時,這種電源電路很有用。根據不同應用,無電池模式下C1電容值從幾微法到幾法不等。

圖6:在基站電路中,電流驅動器U1放大來自MCU的125 kHz方波脈沖的功率。U1的方波脈沖輸出通過由L1、C2、C3和C4組成的LC串聯諧振電路后變成正弦波。
應答器電路
應答器電路具有三個外部LC諧振電路、五個按鈕開關、一個用于UHF數據發送的433.92MHz諧振器和幾個用于后備電池模式的元件。
每個LC諧振電路都連接到LC輸入和LCCOM引腳。空芯天線連接到LCX輸入,兩個鐵氧體磁棒電感連接到LCY和LCZ引腳。LCCOM引腳為三個天線連接的公共引腳,通過C11和R9接地。每個諧振天線必須調諧到基站單元的載波頻率,以達到最佳信號接收狀態(圖5)。可利用每個通道的內部電容將天線調諧到最佳狀態。
器件初始上電時,數字部分利用SPI(CS、SCLK/ALERT和SDIO)對AFE配置寄存器進行編程。由于AFE輸入靈敏度高(約3mV峰峰值),AFE對環境噪聲非常敏感,所以必須采取措施避免沿PCB走線上產生過多交流噪聲。在VDD和VDDT引腳分別使用電容C6和C12濾除噪聲。
二極管D1和D2及電容C5用于電池后備模式,二極管D2、D3和D7及電容C5用于無電池模式。為使無電池模式穩定運行,需要較大的C5容值。電容C5通過二極管D3和D7保存來自電池和線圈電壓的電荷。當電池暫時斷開時,C5儲存的電荷可維持PIC16F639器件的供電。二極管D3和D7穿過空芯線圈相互連接,在三個外部LC諧振天線中產生強大的線圈電壓。
一旦檢測到有效輸入信號,數字MCU部分即被喚醒,如果命令信號有效,則發出一個響應。
應答器可使用內部調制器(LF對講)或外部UHF發送器發出響應。每個模擬輸入通道在輸入和LCCOM引腳間有一個內部調制器(晶體管)。如果AFE從數字MCU部分接收到箝位或斷開箝位的命令,內部調制器就會分別導通和關斷。天線電壓分別根據箝位或斷開箝位命令進行箝位和斷開箝位,這稱為LF對講。LF對講只在近距離應用中使用。基站可以檢測應答器天線電壓的變化并重建調制數據。
在長距離應用中,應答器采用UHF發送器。由UHF(433.92 MHz)諧振器U2和功率放大器Q1構成一個用按鍵通斷的UHF發送器。電容C2和C3的容量都在約20pF的范圍內,具體取決于線路布局。一般由印刷電路板的金屬走線而形成的L1是一個UHF天線,增大其環路面積后效率將顯著提高。
當MCU I/O引腳輸出邏輯高電平時,UHF發送器部分導通,否則關閉。RC5輸出為UHF信號的調制數據,可由基站的UHF接收器重建。
基站電路
基站單元包括一個MCU、125kHz的發送器/接收器和一個UHF接收器模塊。基站發出125kHz的低頻命令信號,并通過UHF和LF接收來自應答器的響應。發出LF命令后,基站通過LF或UHF鏈路檢查是否有響應。
125kHz發送器產生一個基于MCU的脈寬調制器(PWM)輸出的載波信號。電流驅動器U1放大來自MCU的125kHz方波脈沖的功率。U1的方波脈沖輸出通過由L1、C2、C3和C4組成的LC串聯諧振電路后變成正弦波。L1為用于125kHz LF天線的空芯電感(圖6)。
當LC串聯諧振電路調諧到PWM信號的頻率時,天線輻射最強。在諧振頻率處,LC電路阻抗最小,這使得L1負載電流最大,從而產生很強的電磁場。用戶可通過監視L1上的線圈電壓調諧LC電路。二極管D1后的各個元件用來接收來自應答器的LF對講信號。當應答器以LF對講作出響應后,L1上的線圈電壓會由于應答器線圈電壓產生的磁場而改變。由于應答器線圈電壓最初是由基站天線(L1)產生的,所以響應電壓與初始電壓的相位相差180o。因此,在給定條件下,L1上的電壓將隨著應答器的線圈電壓變化。
可通過包絡檢波器和由D1和C5構成的低通濾波器檢測L1上線圈電壓的變化。檢測到的包絡信號通過有源增益濾波器U2A和U2B。經過解調的模擬輸出被饋送到MCU的比較器輸入引腳,以進行脈沖整形。比較器輸出可在TP6上得到,并由MCU解碼。
責任編輯:gt
-
mcu
+關注
關注
146文章
16986瀏覽量
350297 -
濾波器
+關注
關注
160文章
7727瀏覽量
177671 -
電池
+關注
關注
84文章
10458瀏覽量
128998
發布評論請先 登錄
相關推薦
microchip被動無鑰門禁(PKE) 參考設計
PIC16F639上的SPI端口也可以用來連接外部設備嗎?
采用PIC16F639的免持式被動無鑰門禁系統
PKE智能鑰匙系統設計

基于PIC16F639 MCU實現智能PKE 應答器的電路設計


被動無鑰門禁(PKE)系統升級參考設計的詳細中文資料概述
使用PIC16F639 MCU實現智能PKE的系統設計詳細資料概述
基于PIC16F639和PIC18F4680單片機實現PKE智能鑰匙系統的設計






 工商網監
工商網監
評論