 基于模擬CPG芯片在受損脊髓中的有效應用方案
基于模擬CPG芯片在受損脊髓中的有效應用方案
毫無疑問,傷斷了脖子和脊梁是最讓人悲慘的傷痛之一。如果脊髓斷裂,大腦就失去了與身體其它部分聯系的能力,四肢也就無法協調動作。但大多數人沒有意識到的是:對于運動能力來說,第二個問題實際上比第一個更嚴重。雞被割掉腦袋后仍可四下撲騰,這歸功于脊髓的功能:大腦只負責發出運動命令,而對肢體運動本身來說是多余的。但若四肢無法彼此“聯絡”協調,則連簡單的行走都不能進行。
約翰·霍普金斯大學的研究人員發現了解決該問題的一條途徑。他們發現,所有動物(包括雞)四肢的協調活動是由一個中樞模式生成器(CPG)“導演”的。傳感器和執行器將信號傳至脊髓的神經中樞并對輸出做出響應。由于走路有循環往復的特性,脊髓神經學著協調輸入和輸出以產生一種規則模式:當動物學著走路時,脊髓神經變成一個CPG。所以,想使一個脊髓斷裂的動物移動,你需要重新生成這種神經過程。
如果能用一個嵌入芯片實現上述過程,那么就可以通過控制開關實現行走,研究人員推論。
現在,這些研究人員證明了上述想法可以實現。在最近與加拿大阿爾伯塔大學的同事進行的一項實驗中,他們利用一款帶模擬神經元的芯片來控制一個暫時癱瘓的貓的行走。不僅芯片上的信號能用來激勵肌肉,肢體的運動也能被檢測并反饋給人造神經網絡。以這種方式產生的運動也許并不十分自然,但它證明該概念是可行的。與更粗野的數字方式不同,這種模擬方案有潛力在不遠的將來被實際植入到動物體內。
加州大學洛杉磯分校生理科學和神經生物學系教授Reggie Edgerton研究了運動神經控制和神經肌肉的可塑性(適應性和學習能力)。他認為這項新工作向前邁進了一大步:“它提供了一個緊湊裝置,不僅能激勵肌肉,還能根據四肢的運動和動力學反饋來調整激勵幅度。”不應低估約翰·霍普金斯大學所克服的困難,他指出,“從現有數據中所能得到的最重要的一點也許是:在驗證關于記錄傳感信息、對該信息進行處理、然后生成一個可被采用的相當成功的特定肌肉激勵模式的概念方面,業界取得了一些有意義的進展。”
神經形態學方法
一直負責電子工作的約翰·霍普金斯大學副教授Ralph Etienne-Cummings已對基于CPG的運動進行了幾年研究。通過與Iguana Robotics公司Tony Lewis的合作,他在2000年就證明了能用CPG來有效控制工程界和自然界的行走。Lewis和Etienne-Cummings共同搭造了一個小機器人:僅是由胯部支撐的一雙腿。其膝蓋可像鐘擺一樣憑借其自身的動力自由活動。
運動很簡單。由Etienne-Cummings設計的模擬CPG芯片可產生一簇能驅動左/右胯前后活動的峰值信號。當達到行動極限時,胯上的位置傳感器會向該芯片發送峰值信號,該信號用來修改CPG的輸出,以便使左/右胯開始做相反的前后運動。本質上,傳感器將腿部的實時物理信息反饋給CPG,CPG據此協調腿的動作。
這款獨特CPG芯片通過一個模擬電容的充電/放電來進行工作,所以由胯部傳感器極限位置所提供的峰值能使CPG更快充電(在第一階段)、或更慢的放電。因為這將改變CPG的周期,所以,下一個“極限”峰值信號將發生在循環周期的另一個不同位置,從而再次改變其模式。但是,最終CPG模式會收斂于傳感器峰值模式(一種被稱為裹挾(entrainment)的過程),而行走模式也將被確定。因此,只要一條腿完全跨出去,另一側的胯就會開始抓緊行動,產生一個與物理腿完全匹配的步伐。通過增加一個照相機,適當把輸出轉化到峰值信號然后反饋給CPG,研究人員還能使腿邁過障礙物。
在實驗中,CPG芯片本身的功耗不到1mW。
約翰·霍普金斯大學的電子方案包括:一個模擬信號處理器芯片,用來處理送至CPG的信號;一個微處理器,用來控制發送給受控對象的輸出;一個恒流激勵器輸出級。
從機器人到生物學
已在Etienne-Cummings的團隊工作了幾年的一位研究人員Jacob Vogelstein表示,對那些脊髓受損的患者來說,該方法的好處顯而易見:目前患者的治療手段過于原始。“可買到的商業化運動假體設備需要使用者在每次邁步時都按一下按鈕。帶有這種系統的專用行走器在左右側各有一個按鈕。當使用者想移動左腳時,需要按下左邊按鈕;而當使用者想移動右腳時,需要按下右邊按鈕。設備中沒有傳感反饋回路來控制運動。”
在實驗室有更好的系統,他說,“但需要一臺高速PC、一大堆信號處理硬件、一個模數轉換器、以及用C寫的專門軟件。如果要將所有這些硬件塞入一個盒子,大概需要8立方英尺空間。”
與上述要求相比,約翰·霍普金斯大學的電子方案可被放在一塊PCB上。大部分元器件都可從市面上買到:一個模擬信號處理器芯片,用來處理送至CPG的信號;一個微處理器,用來控制發送給受控對象的輸出;一個恒流激勵器輸出級。當然,該系統的核心是模擬CPG芯片。在用貓進行的實驗中,研究人員的定制設備有4組神經電路,用來協調4塊肌肉區(左右后腿的屈肌和伸肌)。
與機器人試驗一樣,該方案利用了胯角度和觸地反作用力(GRF)傳感器向CPG發送信息,CPG防止了相對肌肉同時運動,從而在整體上協調了運動。該芯片曾被用于直接刺激一只脊髓被麻醉從而無法參與運動控制的貓的肌肉。
阿爾伯塔大學神經科學中心助教Vivian Mushahwar負責該活體實驗。雖然實驗中動物的運動緩慢,但她對該芯片產生的運動質量印象深刻。“動物行走看起來近乎自然,而且完全適應所行走的路面。這極其令人振奮并且非常新奇。過去所做的所有實驗中,動物或者在原地踏步、或者只能走在平坦的、無障礙的路面上。CPG芯片支持在無法預知的地形上行走,這是生產能用在非實驗室環境的日常生活中的行走功能系統的一個關鍵步驟。
下一步目標
Mushahwar的大部分工作與神經假體(neuroprostheses)相關,她對這項新工作的前景滿懷激動和憧憬。“CPG芯片的奇妙之處在于,它可用于任何為行走而研制的功能性電子刺激系統。換句話說,它可被用于利用表面電極或植入導線來刺激屈肌和伸肌群的系統。源于神經元連接的靈活性、它們收到的傳感信息、以及這些神經元的“學習”能力,該芯片可用于恢復脊髓完全損傷的病人的活動能力,或增加不完全受損的人的運動能力。
“我們未來的目標,就是把CPG芯片和脊髓內植入的微電子結合起來,而不是直接通過腿表面或植入腿內部的導線來激勵肌肉。脊椎植入將分布在脊髓內橫跨不到5cm的區間內,它將允許激活脊髓內負責產生腿部屈肌和伸肌交替運動的未損神經元網絡群。由于無需在腿部肌肉內直接植入導線,CPG芯片與微電子植入在脊髓內的結合將顯著減小電子刺激系統的體積。它還將產生比我們目前所能達到的更自然、更耐疲勞的行走。”她表示。
Vogelstein相信,電子方法是唯一可能會開花結果的方法。“從長期看,CPG芯片允許我們尋找一種可植入方案,但目前的數字技術卻不容易被植入。CPG芯片與一臺計算機比小得多,它所需要的功耗也要小得多。另外,因硅神經元的作用與生物神經類似,它有可能以自己的語言與脊髓和神經系統直接溝通。與基于PC的方案比,CPG芯片的不足之處是,它不如計算機靈活,但只要它能完成任務,就不需要靈活性。你永遠不需要你的假體CPG芯片運行Windows。”
責任編輯:gt
-
傳感器
+關注
關注
2548文章
50685瀏覽量
752026 -
芯片
+關注
關注
453文章
50417瀏覽量
421853
發布評論請先 登錄
相關推薦
模擬芯片對于治療脊髓受損者的解決方案
模擬CMOS的危害是什么?如何防止器件在系統裝配階段受損?
ESSE觸控芯片在方案應用中遇到的問題怎么解決
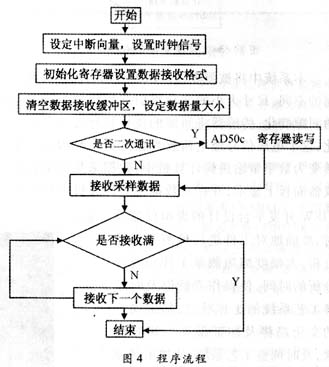
模擬音頻芯片在數據采集過程二次通訊中的應用

H6芯片在應用方案設計中的原理圖和PCB設計要點和注意事項詳細說明






 工商網監
工商網監
評論