 光學鏡頭基本的參數和術語解釋
光學鏡頭基本的參數和術語解釋
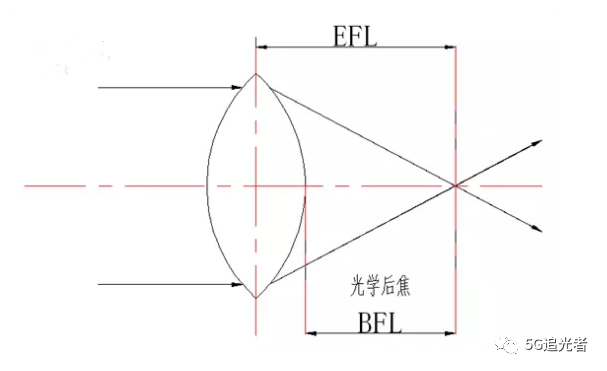
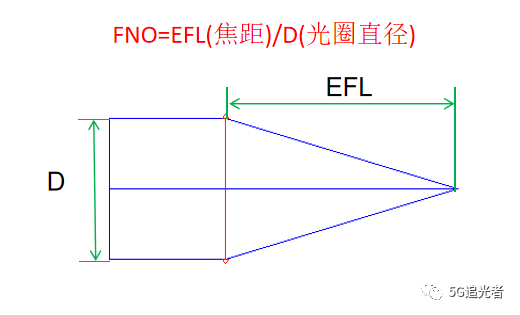
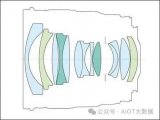
1、EFL(Effective Focal Length)有效焦距
定義:指鏡頭中心到焦點的距離(下圖)。
鏡頭的焦距分為像方焦距和物方焦距(下圖):
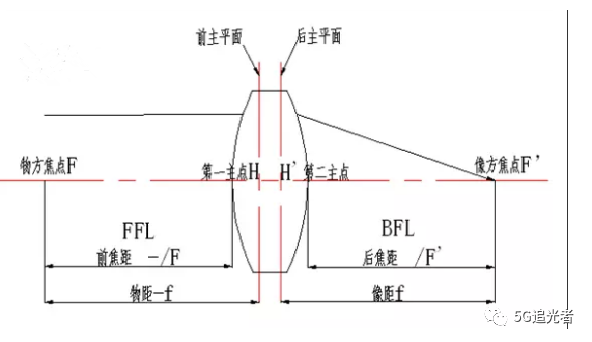
像方焦距是指像方主面(后主面)到像方焦點(后焦點)的距離。
物方焦距是指物方主面(前主面)到物方焦點(前焦點)的距離。
注意事項:
(1)焦距過短則視場角過大,導致畸變和主光線出射角難以控制,相對照度過低,鏡片彎曲嚴重,相差校正困難,因此難以設計。
(2)焦距過長鏡頭將過長,不利于系統小型化,而且視場角過小,不能滿足用戶需求(FOV>60°)。
2、TTL(Total Track Length)鏡頭總長
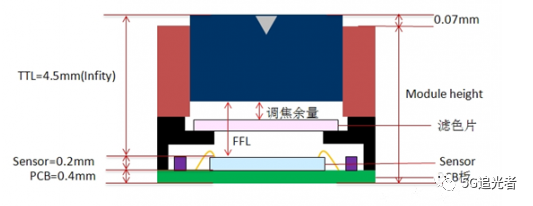
鏡頭總長分為光學總長和機構總長:
光學總長是指由鏡頭中鏡片的第一面到像面的距離。
機構總長是指由鏡筒端面到像面的距離,上圖中TTL所示。
3、BFL(Back Focal Length)光學后焦距定義:
由光學系統中鏡片的最后一面到像面的距離,上圖中BFL所示。
4、FFL(Front Focal Length)光學前焦距
定義:由光學系統中鏡片的第一面到物面的距離,上圖中FFL所示。
注意事項:要與機構后焦距FFL區分
5、FBL/FFL(Flange Focal Length)機構后焦(法蘭焦距)
定義:由鏡組的最后一個機構面到像面的距離,上圖中FFL所示。
6、FOV(Field Of View)視場角定義:
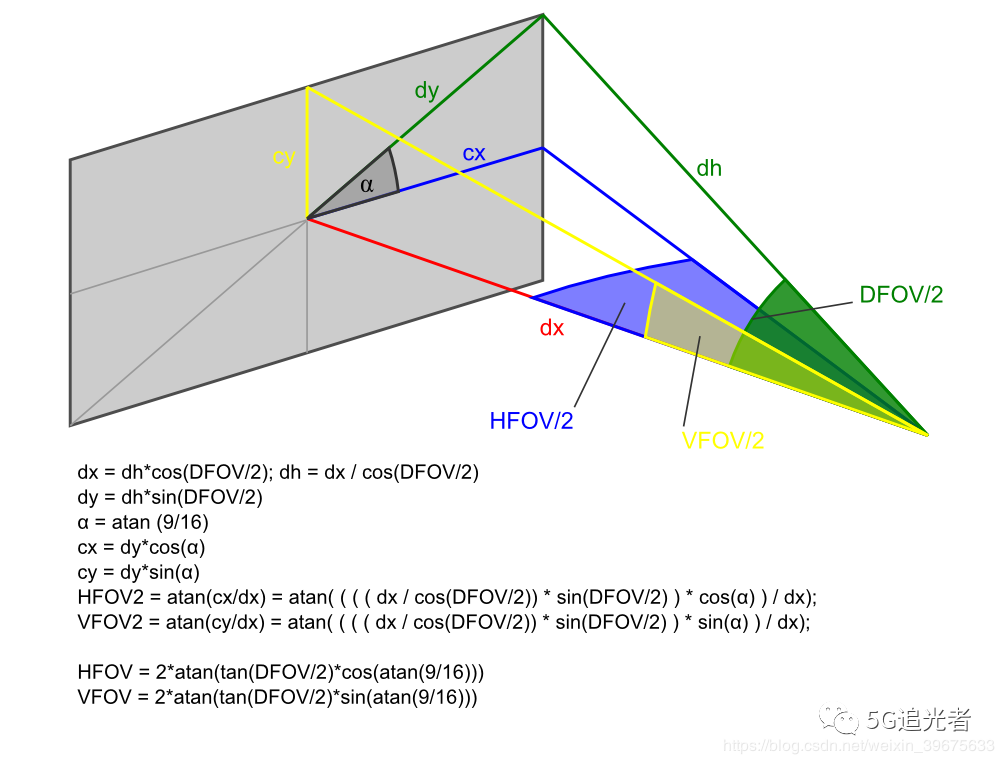
是指鏡頭能拍攝到的最大視場范圍。
視場角可分為對角線視場角(FOV-D)、水平視場角(FOV-H)、以及垂直視場角(FOV-V)。
對角線視場角最大,水平視場角次之,垂直視場角最小。通常我們所講的視場角一般是指數碼攝像模組的對角線視場角。
7、F/NO.(F-Number)焦數(相對孔徑)
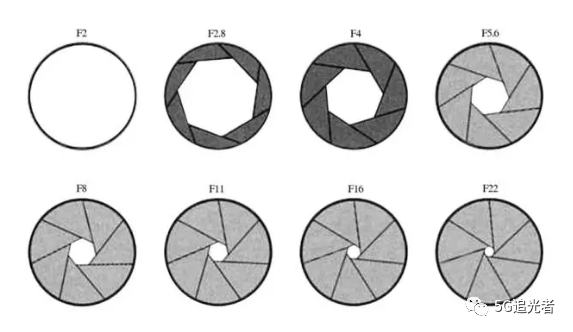
定義:有效焦距與入射瞳孔徑的比值。
作用:用來決定鏡頭之明暗。
備注:在保證同樣通光孔徑的前提下,焦距越短相對孔徑應越小。
一般情況下F/#越小通光孔徑越大。
8、Distortion畸變
畸變是軸外相差。而且是軸外細光束的像差。它是軸外點與主光線在像面上交點的高度同理想(近軸)像面的高度差。它是視場的函數,與孔徑沒有關系,初級畸變隨視場(像高)的三次方變化,而百分比畸變隨像高平方增加,所以視場不同畸變也不同。畸變的變化不是線性的,僅是像的變形,不影響像的清晰度。
畸變分為TV畸變和光學畸變兩種:
TV畸變:TV-Distortion
光學畸變:Optical-Distortion
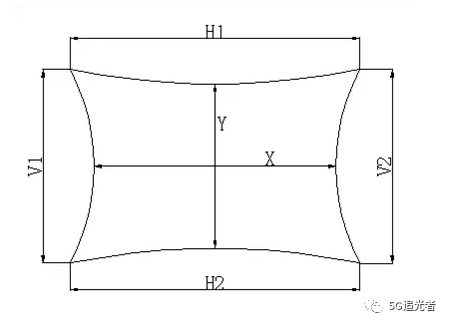
TV畸變分為枕型與筒型兩種。
(Vertical)TV-Distortion=[(V1+V2)/2-Y]/Y*100%
(Horizontal)TV-Distortion=[(H1+H2)/2-X]/X*100%
注意事項:
畸變是用戶很容易感覺到的成像質量。
畸變是用戶要求很嚴的鏡頭指標,
Optical-Distortion<3% 人眼不容易察覺
Optical-Distortion<2% 攝影物鏡的畸變要求
一般要求:
CIF TV-Distortion<2.0%
VGATV-Distortion<1.5%
1.3M/2.0M/3.0MTV-Distortion<1%
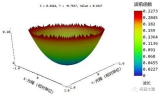
9、RI(Relative Illumination)相對照度
照度的定義:物體或被照面上被光源照射所呈現的光亮程度稱為照度。
相對照度則是中心照度與外圍照度的比值。
注意事項:相對照度過低表現為圖像中心較亮,而四周較暗,即漸暈現象,俗稱暗
角(Shading)。相對照度過低還會導致色彩失真。
RI與COS4(semi-FOV)成正比:RI∝COS4(semi-FOV)
Semi-FOV=30°,從理論上RI<56%?
Semi-FOV=35°,從理論上RI<45%
當RI<50%時人眼是能分辨的,嚴重時會出現畫面四角全黑的“缺角”現象。
因此RI的基本要求為:RI>50%
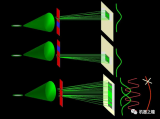
10、CRA(ChiefRay Angle) 主光線角度
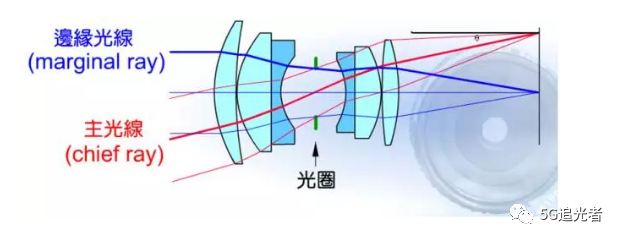
定義:主光線角度為主光線與平行光線的角度。
主光線就是光線由物體的邊緣出射,通過孔徑光闌的中心最后到達像的邊緣。
注意事項:主光線出射角度不合適會暗角嚴重,對比度下降,偏色。
11、MTF(Modulation TransferFunction) 光學調制傳遞函數
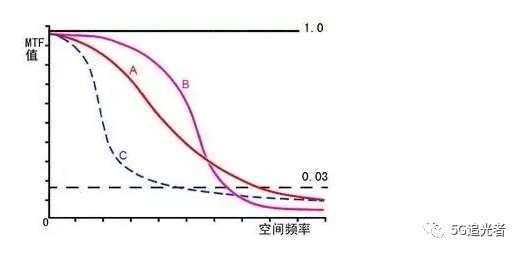
Modulation(M)的定義:Modulation是I的Maximum減去I的Minimum除以I的Maximum加上I的Minimum;也就是(光的最亮度減去光的最暗度)與(光的最亮度加上光的最暗度)的比值。所以得出來的結果M就是光的對比度。
Modulation(M)=(Imax-Imin)/(Imax+Imin)
I:Intensity 光強度
Imax:最亮之光強度
Imin:最暗之光強度
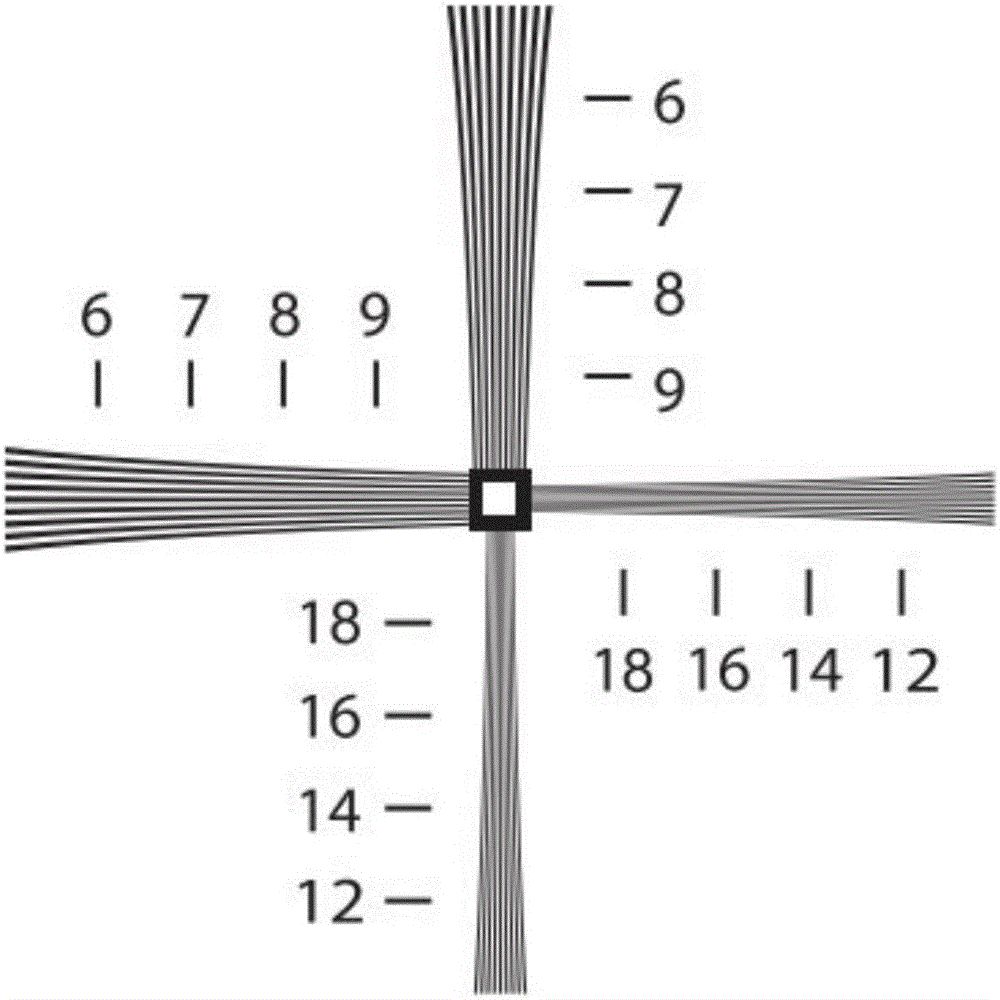
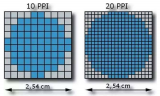
12、解像力(分辨率)
解像力的定義:為每1mm可解析的線對(line-pair)。單位為本(lp/mm)
備注:Sensor MTF的需求計算公式如下,
Sensor全頻解像力:
1000/2.8/2=179lp/mm
(2.8um Pixel Size) 或 1/(2£)
£:SensorPixel Size
Sensor 全頻解像力(黑白):1000/2.8/2=179lp/mm.
但對彩色(RGB)而言,Sensor是以每4pixel解析1點,所以Sensor所需要的本數計算為:中心 1000/2.8/2/sqrt 2=126lp/mm — 160lp/mm(中心通常解析會較高)
外圍1000/2.8/2/sqrt 3=103lp/mm — 100lp/mm(外圍為0.7F)
(sqrt 2為一般計算方式,但不同廠牌或型號Sensor處理邏輯不同,會有差異)
13、TV-Line掃描線
TV-Line就是在畫面水平影像中可解析多少條線,可由解像力來換算:
TV-Line=lp/mm*2*Sensor寬。例1/4’’ 1.3M Sensor:
中心1000/2.8/2/sqrt2=126lp/mm
—126lp/mm*2*1024*2.8/1000=722 — 700 TV-Line
外圍1000/2.8/2/sqrt 3=103lp/mm
—103lp/mm*2*1024*2.8/1000=590 — 600 TV-Line
14、Flare/Ghost雜散光/鬼影
定義:指在一個光學系統里由于光在像面上隨意的散射形成的相反的縮影或霧狀像,也就是光學系統中的非成像光束。鏡頭表面的散射光、元件中的氣泡、鏡框及鏡筒內壁的散射和反射光以及其它非成像光束入射到像面上的光都成為雜光。
它的直接影響是形成噪音,使圖像的信噪比降低,甚至使信號光淹沒在噪聲中。
雜光的消除:在結構中增加遮光罩、輔助光闌、鏡片邊緣染黑、鏡座發黑或貼消光布,以及鍍制減反膜等。
15、景深
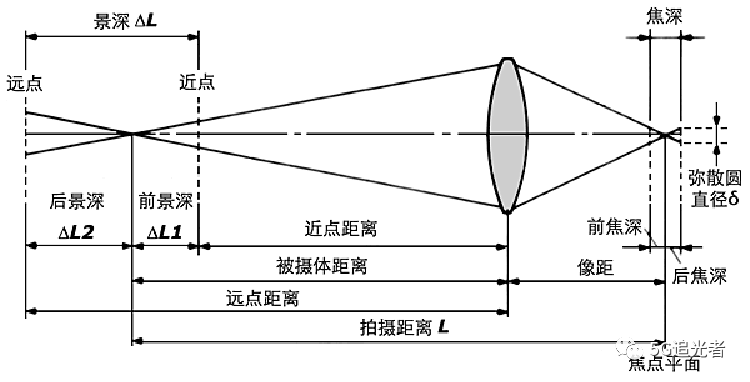
前景深 ΔL1= FδL2/ (f2 + FδL)
后景深 ΔL2= FδL2/ (f2 - FδL)
景深 ΔL =2f2FδL2/( f4 - F2δ2L2)
δ-容許彌散圓直徑,
f-鏡頭焦距,
F-鏡頭的拍攝光圈值,
L-對焦距離,
ΔL1-前景深,
ΔL2-后景深,
ΔL-景深,
從公式可以看出,后景深 > 前景深。由景深計算公式可以看出,景深與鏡頭使用光圈、鏡頭焦距、拍攝距離以及對像質的要求(表現為對容許彌散圓的大小)有關。
超焦深的計算:f2 – FδL=0時,后景深為無窮遠。在聚焦時,最好能將焦點聚在能產生超焦深的焦點處,從前焦深處開始聚焦,這樣,畫面處所有的畫面都能清晰聚焦。
原文標題:光學鏡頭基本參數解釋
文章出處:【微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
責任編輯:haq
-
鏡頭
+關注
關注
2文章
504瀏覽量
25621 -
光學
+關注
關注
3文章
747瀏覽量
36181
原文標題:光學鏡頭基本參數解釋
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦

工業相機鏡頭參數詳解助力精準選型

光學測量鏡頭怎么選?

遠心鏡頭的幾個參數解析

工業鏡頭光學原理、優勢及應用

臺灣光學鏡頭產值年增4.4%,出口擺脫頹勢
工業鏡頭光學系統的成像質量客觀評價

工業相機鏡頭到底怎么選,這些參數不能忘
光學鏡頭常用的光機界面

探索光學鏡頭技術前沿

一文詳解光學鏡頭及攝像模組
鏡頭常見光學問題及原理





 工商網監
工商網監
評論