 淺述行人航位推算的室內定位技術綜述
淺述行人航位推算的室內定位技術綜述
摘 要: 行人航位推算系統(PDR)因其無需部署信標節點、成本低廉的特點被廣泛應用于室內定位中。圍繞基于行人航位推算的室內定位問題,對行人航位推算中步態檢測、步長推算以及方向推算的研究現狀進行了系統的梳理和述評,綜述了基于行人航位推算的室內定位的發展及該領域的一些主要研究成果,指出了該領域現有研究存在的問題,提出了相應建議和深入研究的方向。
0 引言
近年來室內定位系統相當流行,基于室內定位的應用有很多,例如,監測病人在醫院里的位置、消防員在失事建筑物內的位置等。
室內定位領域已有大量的相關工作,比如利用在不同位置的短距離信號(如WiFi、RFID、紅外線等)的信號強度不同來建立射頻地圖。通過監測信號的變化,利用三角測量法可以確定人的位置。但是這種方法需要提前在建筑物內部署大量信標節點,而且信號容易受到環境干擾和多徑效應。
相反,行人航位推測(Pedestrian Dead Reckoning,PDR)系統無需在建筑物內預裝信標節點,利用慣性傳感器(如加速度傳感器、陀螺儀、數字羅盤等)計算步長和方向,即可推測出行人的蹤跡。
1 PDR系統概述
PDR系統所使用的PDR算法,如圖1所示[1],它是一種相對定位算法。圖1中,E和N分別代表正東和正北方向。
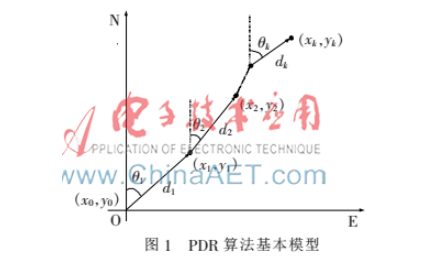
PDR算法:已知行人的起始位置(x0,y0),利用方位角θ1和步長d1,可以計算出下一步到達的位置(x1,y1),如此反復迭代計算,可以計算出行人第k步到達的位置信息如下
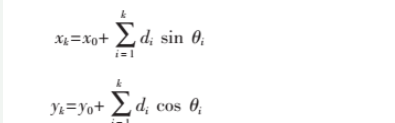
式中θi和di(i=1,…,k)分別代表第i步的方位角和步長。PDR系統的結構框架如圖2所示。
2 步態檢測
步態檢測是基于慣性傳感器的行人定位系統中的模塊之一,步態檢測算法分類如下。
2.1 時域分析
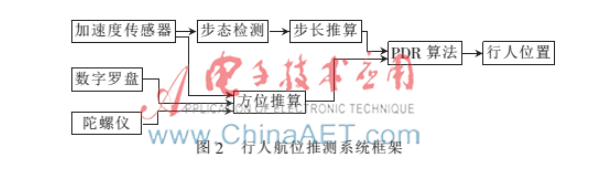
人在行走的時候隨身攜帶的手機的加速度軌跡在時域呈現周期性變化。Qian J等人[2]提出利用手機內的三軸加速度傳感器記錄加速度軌跡,再從加速度軌跡中檢測閾值,當然在行走過程中人持手機會有些小的異常抖動產生,如圖3所示。時域分析方法除了閾值檢測法之外,還有動態時間規整法[3]。
2.2 頻域分析
頻域分析的原理是人行走時的頻率穩定在2 Hz左右,而其他行為的頻率一般不在2 Hz附近,利用這一特點,參考文獻[4]利用短期傅里葉變換(STFT)提取出人行為的頻率,若在2 Hz附近,則認為是跨了一步。
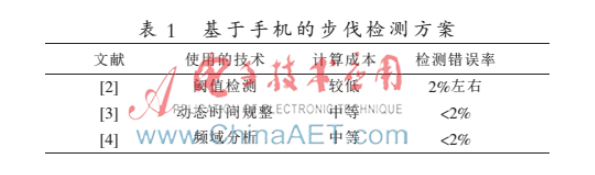
從上看出,時域分析方法較為直觀易懂,缺點是在時域上容易受其他噪聲的影響。頻域分析方法主要是利用行走時所特有的2 Hz來區分行走和其他行為,但不夠直觀,比如很難區分人抬腳和落腳兩種行為,因為其頻率差別很小。表1從技術、計算成本和檢測錯誤率方面出發,總結比較了一些基于手機的步伐檢測文獻。
3 步長推算
由于每個人的身高、走路的方式不同,所以每個人的步長也不一樣,關于步長推算方面的一些研究文獻總結如下。
3.1 常數模型
推算步長最直觀的方法就是將一段測得的行走距離除以計數得到的步數,得平均步長,即認為步長是常數[5]。但是實際上由于人在行走時的姿勢會有所變化,所以步長也會改變。
3.2 線性頻率模型
模型A:
Li F等人[3]通過收集23個不同身高的人行走4 000步的數據,分析得到步長和頻率呈線性關系,提出了線性頻率模型:
L=a·f+b
a和b值通過大量線下訓練求得,此方法計算成本較小,計算精度也較低。
模型B:
Renaudin V等人[6]提出基于步頻和行人身高的步長推算模型:
L=h·(a·f+b)+c(1)
式中L是步長,h是身高,f是步頻,K={a,b,c}是針對每個人的系數集合。實驗結果表明該模型的步長推算錯誤率為5.7%,而計算成本依舊較低。
模型C:
Qian J[2]提出基于步頻和加速度方差的步長推算模型:

式中f是步頻,ν是每一步的加速度方差,K={α,β,γ}是每個人的系數集合。實驗結果表明該模型步長推算精度較高,同時其計算成本也較大。
3.3 經驗模型
Tian Z等人[1]提出了一種經驗模型:

式中amax和amin分別是步態檢測過程中的加速度最大值和最小值,C是比例系數,Tian Z等人采用了一種反向傳播的神經網絡來計算C的值,計算成本很高。
表2總結比較了一些基于手機的步長推算文獻。
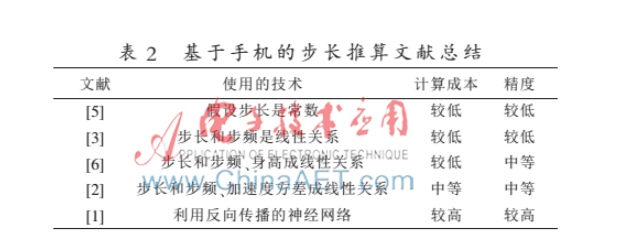
從表2可以看出,綜合計算成本和精度兩方面,文獻[6]最理想,盡管文獻[1]精度更高,但其計算成本較高,不適合實際應用。
4 方向推算
已知步長,還必須知道步行方向才能計算出行人的位置。通常智能手機上都有數字羅盤(方向傳感器),它能測出手機的Y軸投影到水平面時和地磁北極的夾角,即手機的方向角。但此方法存在地磁偏差和位置偏差。為了克服以上偏差,很多文獻方案提出融合其他傳感器,根據使用的傳感器類型不同,可將這些方案分為如下兩類。
4.1 融合慣性傳感器
由于智能手機里集成了很多慣性傳感器(如加速度傳感器、陀螺儀),它們可以和數字羅盤結合起來使用。例如用加速度傳感器測得的加速度軌跡可以用來確定一類時間點,在這類時間點上的位置偏差和在起點人把手機放進衣袋后的位置偏差相同,這樣只要測出在起點的位置偏差,再結合在每一步的推斷點上測到的手機方向角,二者相加即為人走每一步時的行走方向[2]。
4.2 融合照相機
天花板的直線邊緣可以作為參考來推算行人方向。Sun Z等人[7]先是利用計算機視覺技術從手機拍到的照片中提取出天花板邊緣,再計算手機Y軸相對天花板邊緣的方向偏差。由于建筑物水平界面大多是長方形的,所以天花板邊緣相對建筑物水平或垂直,這時再測量建筑物的絕對方向,相當于天花板邊緣的絕對方向,再結合前面手機相對天花板邊緣的方向偏差,就能得到手機的方向。該方案能取得1°左右的精度,缺點是計算量巨大,耗能也很大。
表3列舉總結了一些基于手機的行人方向推算文獻。
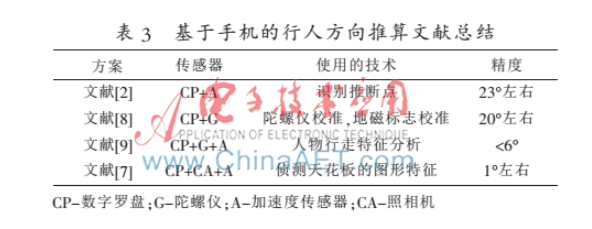
從表3看出,大多數方案都是把幾種傳感器融合在一起,這樣可以部分抵消單獨使用數字羅盤測量方向時受到的地磁偏差和位置偏差影響。
5 開放性研究問題
在行人航位推算應用于室內定位的過程中,依舊存在著一些研究問題。
5.1 不同方案系統的融合
將幾種定位技術結合起來使用可以有效提高定位的精度、可靠性,同時能節省能耗成本。而且,能根據人所在的環境以及定位需求的不同選擇最合適的定位技術,從而實現無縫切換。比如WiFi指紋定位和行人航位推算相結合的定位[10]。
5.2 利用外部環境提高精度
除了內部優化步伐探測、步長推算和方向推算算法,還可以借助外部環境提高定位精度,例如借助地標。在某個位置的手機傳感器讀數若有明顯的特征,則認為該位置是一個地標。比如人乘坐電梯時手機的加速度傳感器讀數會有明顯的特征,可以把電梯位置作為地標[11]。
6 結束語
行人航位推算系統(PDR)不需要在室內預裝信標節點就能實現室內定位,跟蹤行人軌跡。本文回顧了PDR系統中三個模塊:步伐檢測、步長推算、方向推算的各種算法方案,對它們進行了簡單介紹和比較。最后列舉了一些熱門的開放性問題。
參考文獻
[1] TIAN Z, ZHANG Y, ZHOU M, et al. Pedestrian dead reckoning for MARG navigation using a smartphone[J]. EURASIP Journal on Advances in Signal Processing, 2014, 2014(1): 1-9.
[2] QIAN J, MA J, YING R, et al. An improved indoor localization method using smartphone inertial sensors[C]. Indoor Positioning and Indoor Navigation (IPIN), 2013 International Conference on. IEEE, 2013: 1-7.
[3] LI F, ZHAO C, DING G, et al. A reliable and accurate indoor localization method using phone inertial sensors[C].Proceedings of the 2012 ACM Conference on Ubiquitous Computing, ACM, 2012: 421-430.
[4] BRAJDIC A, HARLE R. Walk detection and step counting on unconstrained smartphones[C]. Proceedings of the 2013 ACM International Joint Conference on Pervasive and ubiquitous computing, ACM, 2013: 225-234.
[5] CHO D K, MUN M, LEE U, et al. Autogait: a mobile platform that accurately estimates the distance walked[C]. Pervasive Computing and Communications(PerCom), 2010 IEEE International Conference on. IEEE, 2010: 116-124.
[6] RENAUDIN V, SUSI M, LACHAPELLE G. Step length estimation using handheld inertial sensors[J]. Sensors, 2012, 12(7):8507-8525.
[7] SUN Z, PAN S, SU Y C, et al. Headio: zero-configured heading acquisition for indoor mobile devices through multimodal context sensing[C]. Proceedings of the 2013 ACM International Joint Conference on Pervasive and Ubiquitous Computing, ACM, 2013:33-42.
[8] WANG H, SEN S, ELGOHARY A, et al. No need to war-drive: unsupervised indoor localization[C]. Proceedings of the 10th International Conference on Mobile Systems, Applications, and Services, ACM, 2012:197-210.
[9] ROY N, WANG H, ROY CHOUDHURY R. I am a smartphone and I can tell my user′s walking direction[C]. Proceedings of the 12th Annual International Conference on Mobile Systems, Applications, and Services, ACM, 2014: 329-342.
[10] XIAO W, NI W, TOH Y K. Integrated Wi-Fi fingerprinting and inertial sensing for indoor positioning[C]. Indoor Positioning and Indoor Navigation (IPIN), 2011 International Conference on. IEEE, 2011: 1-6.
[11] SHEN G, CHEN Z, ZHANG P, et al. Walkie-markie: indoor pathway mapping made easy[C]. Proceedings of the 10th USENIX Conference on Networked Systems Design and Implementation, USENIX Association, 2013: 85-98.
編輯:jq
-
智能手機
+關注
關注
66文章
18429瀏覽量
179852 -
RFID
+關注
關注
387文章
6105瀏覽量
237379 -
慣性傳感器
+關注
關注
2文章
167瀏覽量
27909 -
室內定位
+關注
關注
30文章
301瀏覽量
36505
發布評論請先 登錄
相關推薦
UWB標簽在室內定位中的優勢
高精度域內定位技術AOA與RSSI區別有哪些
無線室內定位系統是通過什么技術實現的呢?

如何利用LoRa實現室內定位?

室內定位技術在智慧醫療物聯網的應用

基于java+單體服務 +?硬件(UWB定位基站、卡牌)技術架構開發的UWB室內定位系統源碼

UWB技術應用:UWB模塊在室內定位系統中的關鍵角色
室內定位藍牙AoA/RSSI技術選擇參考

基于室內定位技術的人員數字化管理







 工商網監
工商網監
評論