") 90后科學(xué)家杜韜實現(xiàn)“海星”機器人
90后科學(xué)家杜韜實現(xiàn)“海星”機器人
18 小時就能創(chuàng)建一臺機器人?
來自江蘇的 90 后科學(xué)家杜韜實現(xiàn)了,這是一款海星機器人(下稱 “海星”),外形酷似真實的海星。
他告訴 DeepTech,此前很多海底機器人因為外形奇異,在水下執(zhí)行探測任務(wù)時,往往會嚇到水底生物,而本次機器人的仿生造型,可以解決上述難題。
其中,杜韜和合作者們提出了快速制作和控制 “海星” 的軟件和硬件實驗平臺。
他們提出的硬件設(shè)以及利用 C++ 和 Python 開發(fā)的機器學(xué)習(xí)算法系統(tǒng),能在 18 小時內(nèi)完成從制備、到仿真、再到系統(tǒng)識別和軌跡優(yōu)化 “海星” 的全過程。
當(dāng) “海星” 在水箱中進行測試時,相關(guān)實際性能數(shù)據(jù)會反饋到計算機模型中,并可得到進一步優(yōu)化。以這種方式來回移動,能在幾個小時內(nèi)生產(chǎn)出功能性產(chǎn)品。
此外,僅使用單個低功率執(zhí)行器,它就能實現(xiàn)移動,通過四個腿中的肌腱運動,可給其帶來交替擠壓和腿部釋放,從而實現(xiàn)安靜且高效的游動。
“海星” 是本次工作核心算法的硬件平臺,目前它主要由硅膠泡沫(silicone foam)、單個低功率電機、四條腿以及相連的肌腱組成。
“海星”前肢肌腱上連接了一個低功率電機,這些肌腱可以被擠壓和釋放,從而使機器人可以安靜地移動并有效地在水中游動。
制備 “海星” 時,先利用 CAD 設(shè)計軟件 OnShape 設(shè)計 “海星” 身體,隨后制作一個模具,將硅膠泡沫灌注到模具中,定型后即得到 “海星” 身體。
在水中時,硅膠泡沫具備較好的彈性和浮力,使用本次研究中的新算法進行優(yōu)化后,“海星” 在水中的移動速度,比手工調(diào)試的控制器快四倍。
“海星” 每條腿的內(nèi)部有一根高強度魚線,你可能會好奇魚線是如何植入 “海星” 的,具體來說首先要從每條腿的腳尖,朝著舵機方向插入一根中空的導(dǎo)管,導(dǎo)管中放有魚線,將導(dǎo)管抽出后,魚線即可被運輸?shù)?“海星” 體內(nèi)。
進去后,魚線一端固定在 “海星” 腳尖,另一端匯集到 “海星” 背上的舵機。舵機轉(zhuǎn)動時,可以同時收放四根魚線,從而同時收縮或伸直它的四條腿。
“海星” 飛速游動是頭等目標(biāo)
在 “海星” 的固液耦合上,杜韜采用一種經(jīng)驗公式,去建模它和水流之間的耦合,并使用可微仿真的工具,去微調(diào)建模時的參數(shù)。
研究主要目的,是讓 “海星” 游得越快越好。概括來說,該任務(wù)的完成主要分為兩大步驟。
第一步是要對系統(tǒng)有較好的建模,即要了解機器人的基本信息,因此他先后測出機器人的體積、重量、密度和楊氏模量(衡量材料軟硬的單位)的大致范圍,用來對海星進行建模。
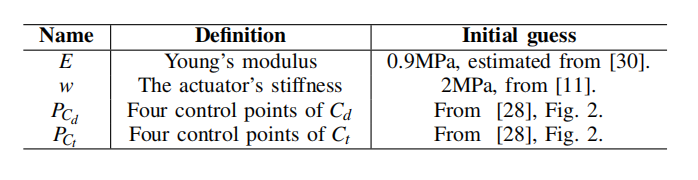
圖 | 模型參數(shù)(來源:受訪者)
具體來講,是讓 “海星” 在實驗中執(zhí)行簡單的控制信號,并和水流做一些交互。獲得實驗數(shù)據(jù)后,使用可微仿真工具,讓仿真中的 “海星” 物理模型再去執(zhí)行同樣的控制信號。
通過分別觀察仿真環(huán)境、和實驗環(huán)境中的運動軌跡,本次算法能不斷調(diào)整建模參數(shù),從而讓物理系統(tǒng)建模更加準(zhǔn)確。
可微仿真工具的好處在于,不僅能正向模擬出“海星”的運動軌跡,也能計算它和真機實驗中軌跡的誤差值,并反向傳導(dǎo)誤差對于機器人參數(shù)的梯度。充分利用這些梯度信息就可以更快速、更高效地調(diào)整建模參數(shù)。
第二步是在建模的基礎(chǔ)上,求解軌跡優(yōu)化來提出新的控制信號。研究到這里,本該按下結(jié)束鍵,但杜韜打算多次迭代,借此形成循環(huán)從而提升模型猜測。
可讓機器人不斷迭代的算法
詳細(xì)來說,他的算法通過改進對模型參數(shù)的估計,可做出新的控制信號,并部署在真機實驗上。此時 “海星” 就能執(zhí)行新的通訊信號,如此便可產(chǎn)出更多數(shù)據(jù)用來進一步改善對于模型的猜測和評估。
他告訴 DeepTech,該研究的重點在于算法,“海星” 只是驗證算法成功與否的工具。相比傳統(tǒng)方法,最精彩的部分在于算法的逐步迭代過程。
首次迭代時,即使使用人工多次調(diào)試后的控制信號,“海星” 拼命游動腿部也只能前進一小段距離,哪怕收集到的數(shù)據(jù)再多、在仿真中把數(shù)據(jù)擬合得再好,也只是擬合了它在低速環(huán)境中的模型。
這在獲得可讓 “海星” 高速運動的模型方面,幾乎沒有任何幫助。因為,“海星” 在低水速和高水速情況下的運動狀態(tài)、以及和水流的交互都不一樣。
而這樣迭代幾次后,“海星” 就能獲得更快的運動方法,這時便可搜集高水速時的數(shù)據(jù),從而修正模型、讓其具備指揮機器人快速游動的能力。
該研究的痛點在于:相比陸地機器人,由于水流、海水鹽度和浮力等變量,水下機器人更難設(shè)計,復(fù)雜的水運動動力、及其快速 “破壞” 電機系統(tǒng)的威力,導(dǎo)致科學(xué)家們往往需要耗時幾周、甚至更長時間才能制備出水下機器人。
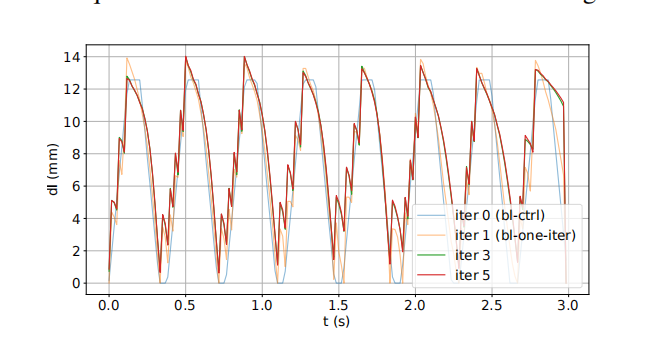
圖 | 相關(guān)數(shù)據(jù)(來源:受訪者)
由于每一次在真機實驗中收集到的數(shù)據(jù)都十分珍貴,工程師們迫切需要好的算法來充分挖掘出這些數(shù)據(jù)里最有價值的信息。
無論在平靜水流、還是起伏波浪中,水下機器人與周圍流體之間的被動相互作用,都比陸地機器人在穩(wěn)定地形上行走要復(fù)雜得多,因此非常難以創(chuàng)建水下機器人的控制系統(tǒng)。
另外柔性機器人往往有成千上萬的自由度,運動上難以被控制。而杜韜研發(fā)的算法,正是該問題的 “克星”。
一言以蔽之,這項工作旨在通過有效仿真和真實實驗的混合循環(huán),來縮小機器人和現(xiàn)實的差距。
“海星” 未來:星星般閃耀
與剛性機器人相比,“海星” 更安全、更堅固、也更靈活。對于需要在狹窄空間中移動的環(huán)境,“海星” 的彈性,讓它能從碰撞中恢復(fù)。在相關(guān)場景中,更多學(xué)者們也開始轉(zhuǎn)向柔性機器人。
目前,相關(guān)論文已發(fā)表在 IEEE RA-L 期刊上,標(biāo)題為《基于可微仿真的水下柔性機器人建模與控制》Underwater Soft Robot Modeling and Control with Differentiable Simulation。在本周的機器人國際會議 RoboSoft 2021 會議上,杜韜還對“海星”做了線上展示。
談及未來應(yīng)用,杜韜告訴 DeepTech,盡管他們只在海星上展示了他們的迭代算法,他和他的合作者都認(rèn)為這個算法可以被廣泛應(yīng)用在其他機器人的設(shè)計和控制上。
“系統(tǒng)識別和求解控制,是機器人研究中非常關(guān)鍵的步驟,而求解這兩個步驟的過程在不少機器人上都是高度耦合的,” 杜韜表示,“我們期待著今后在更多類型的機器人,比如設(shè)計出混合剛性關(guān)節(jié)和柔性肌肉的新型水下機器人,從而去復(fù)制‘海星’的成功。”
他補充稱,本次之所以選擇海星設(shè)計,是因為其動作簡單而優(yōu)雅,并且通過擠壓和釋放其腿部來實現(xiàn)向前運動。
目前,杜韜是麻省理工學(xué)院(MIT)CSAIL實驗室的博士生。本次研究中,他和同樣來自 CSAIL 的博士后 Josie Hughes 作為共同第一作者,主導(dǎo)了“海星”的軟硬件開發(fā)。
杜韜是江蘇人,本科畢業(yè)于清華大學(xué)軟件學(xué)院,后在斯坦福大學(xué)計算機系獲得碩士學(xué)位。2015 年,他來到 MIT CSAIL 實驗室攻讀博士學(xué)位,并將于今年畢業(yè),其研究方向包括計算機圖形學(xué)、機器人、機器學(xué)習(xí)等。
業(yè)內(nèi)知名機器人大牛——CSAIL 實驗室主任丹妮拉·羅斯(Daniela Rus)教授,也是該論文的作者,作為世界權(quán)威的機器人專家,羅斯領(lǐng)導(dǎo)了多項柔性機器人和水下機器人的著名研究。
對于本次研究她表示,相比傳統(tǒng)剛性機器人,在和人交互時柔性機器人更安全,在復(fù)雜的未知環(huán)境中,后者也更加健壯和靈活。而本次“海星”機器人和海洋生物共處時不會驚擾到它們,如此便可在探測海洋的同時,保護好海洋精靈們。
未來,通過利用更快速的設(shè)計和控制算法,他們將設(shè)計更多樣的仿生柔性機器魚,來作為觀測站去近距離觀察海洋生物。
原文標(biāo)題:江蘇90后科學(xué)家聯(lián)合研發(fā)“海星”機器人,有望用于海底探測!由MIT CSAIL出品,數(shù)小時內(nèi)完成制備 | 專訪
文章出處:【微信公眾號:DeepTech深科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
責(zé)任編輯:haq
-
機器人
+關(guān)注
關(guān)注
210文章
28195瀏覽量
206508
原文標(biāo)題:江蘇90后科學(xué)家聯(lián)合研發(fā)“海星”機器人,有望用于海底探測!由MIT CSAIL出品,數(shù)小時內(nèi)完成制備 | 專訪
文章出處:【微信號:deeptechchina,微信公眾號:deeptechchina】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
【書籍評測活動NO.51】具身智能機器人系統(tǒng) | 了解AI的下一個浪潮!
「感恩相遇」第90屆CMEF圓滿落幕,邁步機器人完美收官

英偉達預(yù)測機器人領(lǐng)域或迎“GPT-3時刻”
Jim Fan展望:機器人領(lǐng)域即將迎來GPT-3式突破
開源項目!用ESP32做一個可愛的無用機器人
受人眼啟發(fā)!科學(xué)家開發(fā)出新型改良相機
天津大學(xué)科學(xué)家突破人類大腦器官成功驅(qū)動機器人
Al大模型機器人
新華社:突破性成果!祝賀我國科學(xué)家成功研發(fā)這一傳感器!

前OpenAI首席科學(xué)家創(chuàng)辦新的AI公司
其利天下技術(shù)·搭載無刷電機的掃地機器人的前景如何?
谷歌DeepMind科學(xué)家欲建AI初創(chuàng)公司
科學(xué)家研發(fā)仿生小鼠機器人,可用于災(zāi)后救援和探測檢修等領(lǐng)域






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論