 剖析單片機六自由度自動尋跡機械人的設計
剖析單片機六自由度自動尋跡機械人的設計
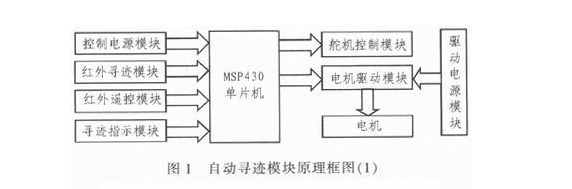
本設計中自動尋跡模塊主要由單片機及其外同電路、紅外尋跡電路、直流電機控制電路等組成。正常工作時,單片機循環檢測紅外尋跡電路輸出信號,據此產生直流電機控制信號,當系統檢測到工作方式發生改變時,系統進入相應方式。其原理框圖如圖1、圖2所示。
1 系統原理
1.1 自動尋跡模塊的系統原理
本設計中自動尋跡模塊主要由單片機及其外同電路、紅外尋跡電路、直流電機控制電路等組成。正常工作時,單片機循環檢測紅外尋跡電路輸出信號,據此產生直流電機控制信號,當系統檢測到工作方式發生改變時,系統進入相應方式。其原理框圖如圖1、圖2所示。

1.2 六自由度機械手模塊的系統原理
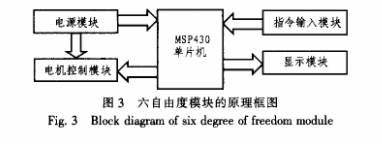
系統的設計采用模塊化的方法,將機械于劃分為基座、手臂、手腕、手部4部分。控制器以MSP430單片機為主控制器,具體控制部分框圖見圖3。
2 系統設計
2.1 自動尋跡模塊硬件設計
1)基本單片機系統
尋跡機器人系統的控制核心,一般情況下以MSP430單片機片內的基本硬件資源為主,有必要時再擴展部分外部器件。在本設計中需要完成的控制比較簡單,以單片機片內的基本硬件資源完全可以實現,因此不需擴展。
2)放大信號電路
采用LM324控制,LM324是四運放集成電路,它采用14腳雙列直插塑料封裝,內部包含四組形式完全相同的運算放大器,除電源共用外,四組運放相互獨立。
3)電動機驅動電路
所選用的電動機為普通的直流電機,在MSP430單片機的控制下,可接一個電機驅動芯片或者通過其他的一些原件可使電機轉動。本系統為了設計簡單,采用其他方式代替了電路驅動芯片。
2.2 六自由度機械手模塊硬件設計
六自由度機械手是由6個伺服電機驅動的機器手臂。除了構成手臂的4個關節、手腕1個關節外,再加上手部的夾持,實現了1個機械手的機械結構。
該控制模塊采用5 V直流電源分別為單片機和機械手臂的電機供電,電路包括手動復位電路、晶振電路、矩陣鍵盤、用以控制單片機轉角的控制的獨立鍵盤、伺服電機接入口,并可通過顯示屏顯示被選電機標識號和該電機轉動的角度。
3 軟件設計
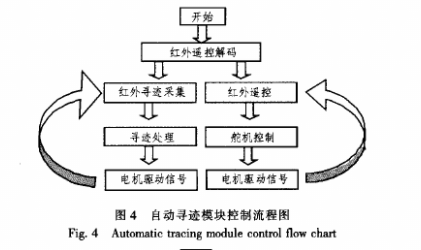
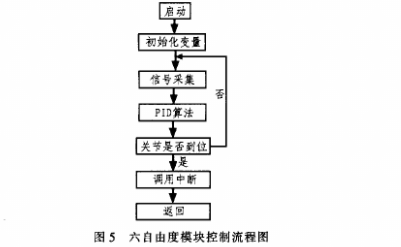
本系統的軟件設計面向硬件,選用C語言編程。最主要部分是單片機控制電機轉動(包括正轉反轉)、時間的延遲和PID算法,具體的設計流程圖見圖4和圖5。
4 系統調試
1)程序編完后,對代碼仔細逐行檢查。檢查代碼的錯誤,建立自己的代碼檢查表,對經常易錯的地方進行檢查。檢查代碼是否符合編程規范。
2)調試程序看是否能仿真,如果運行正常再將在編譯器中調試好的程序燒寫至單片機。
3)在接上電源時,觀察整體電路是否按照預計設計的運作,電機是否正轉,電機是否反轉等。可根據電路的運行情況推測出程序出錯的部分,修改程序后再經過編譯器調試后燒到單片機,反復檢測直到能工作完全正常。
5 結束語
本系統為單片機的尋跡機器人系統,主要應用單片機MSP430作為控制核心,直流電機、舵機、一體紅外接收頭等相結合的系統。這個系統軟硬件設計簡單,易于開發,嚴格控制各種元件的采購成本,所以價格低廉,安全可靠,操作方便。
編輯:jq
-
電路
+關注
關注
172文章
5851瀏覽量
171915 -
單片機
+關注
關注
6032文章
44521瀏覽量
633086 -
機械手
+關注
關注
7文章
333瀏覽量
29617
發布評論請先 登錄
相關推薦
H60.XYZTR5六自由度并聯機構

小鵬汽車正式進軍人形機器人領域,發布AI機器人Iron
單片機在工業自動化中的應用
靈巧手成為機器人競爭下半場,但空心杯電機要失寵了?
國產Cortex-A55人工智能教學實驗箱_基于Python機械臂跳舞實驗案例分享
干貨!國產Cortex-A55人工智能實驗箱機械臂積木搬運實驗案例

基于FPGA EtherCAT的六自由度機器人視覺伺服控制設計
基于FPGA的六自由度機器人視覺伺服控制方案設計

新手學習單片機最常見的六大誤區!

常見的多關節機器人有哪些?具有什么特點?

無線自由:探索AGV無線充電技術的自由度優勢
單片機代碼自動生成器程序
高效、精確、可靠的自動化設備——直角坐標機器人
一文讀懂六自由度激光跟蹤儀






 工商網監
工商網監
評論