 淺談PIC16F685的低功耗傾角測量儀的設計
淺談PIC16F685的低功耗傾角測量儀的設計
摘 要: 針對目前傾角測量儀測量精度差、功耗較大等缺點,設計了一種新型的傾角測量裝置。該低功耗傾角測量儀以PIC16F685單片機為主控芯片,利用ADXL345數字式傳感器三軸加速度測速計測量傾角,采用LCD液晶顯示所測數據。通過優質算法使傾角測量儀的測量精度大大提高,使精度誤差在±0.5°之內,并且功耗較低,在實際應用中效果較好。
0 引言
隨著科技水平的提高,機械產品需求越來越高,傾角測量儀越來越廣泛地應用于工程機械設計、汽車電子設計、水平測量、電力系統監控以及建筑設計等各個行業的角度測量中。由于環境條件的干擾,對測量儀的要求越來越高,需要有較高的精度以及較強的抗干擾和抗沖擊能力,并且需要結構簡單易用。基于這種要求,本文改進設計出了一種新型傾角測量儀器。
1 系統概述
本設計主要由充電模塊、傾角測量儀模塊、主控制電路模塊、顯示模塊等幾部分組成。其中充電模塊由電容、干電池等組成,為測量傾角提供電源;傾角測量儀模塊是由加速度傳感器ADXL345作為主要芯片的設計,主要用于測量傾角;主控模塊采用了基于PIC16F685單片機為主芯片的設計;顯示模塊采用LCD顯示模塊,可以清晰地顯示所測角度。設計中軟硬件互相配合,并采用各種保護和抗干擾技術,通過優質算法使傾角測量儀的測量精度大大提高,并且采用低功耗元器件使所需能耗大大降低。
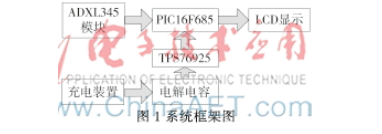
系統框架如圖1所示。采用PIC16F685[1]作為主控制器,具有低電壓啟動、功耗低、體積小、抗干擾性強等優點,且內置I2C模塊,可大大簡化硬件電路和軟件編程。ADXL345[2]是一款小而薄的超低功耗三軸加速度計,分辨率高(13位),測量范圍達±16 g,用其測量靜態重力加速度。顯示器選用低功耗的段碼液晶,具有低壓微功耗、外觀小巧精致、顯示信息量大、壽命長等優點。其工作原理是通過ADXL345模塊檢測得到數據,通過接口傳送給單片機PIC16F685,再把測量結果通過輸出接口傳送給LCD顯示。
2 理論分析與計算
2.1 傾角計算
在立體坐標軸情況下,可在全球面范圍確定傳感器的方向。可通過傳統的直角坐標(x,y,z)—球面(ρ,θ,φ)轉換法來表征xy平面傾斜角θ及重力矢量傾斜角與各軸測得加速度之間的關系。如以下二式[3]所示:

2.2 理論功耗分析
PIC16F685為采用納瓦技術的20引腳8位CMOS閃存單片機。待機電流: 2.0 V時,典型值為1 nA;工作電流:32 kHz、2.0 V時,典型值為20 μA;4 MHz、5.5 V 時,典型值< 1 mA;看門狗定時器電流:2.0 V時,典型值< 1 μA。
RA2上的超低功耗喚醒(ULPWU)功能允許緩慢下降的電壓能夠在RA2上產生電平變化中斷,同時不消耗很大的電流。將ULPWUE 位(PCON<5>)置1將選取超低功耗喚醒模式。這將產生一個小的灌電流,可用來對RA2上電容器進行放電。將ULPWUE位置1 以開始放電,并執行SLEEP指令。當RA2上電壓下降到低于VIL時,將產生中斷,將器件喚醒。該功能提供了一種周期性將器件從休眠中喚醒的低功耗方法。休眠時間取決于RA2上RC電路的放電時間。
如果運行條件超過了“絕對極限參數值”(總功耗:800 mw),即可能對器件造成永久性損壞。器件長時間工作在絕對極限參數條件下,其穩定性可能受到影響。MCLR引腳上若出現低于VSS的尖峰電壓,感應電流超過80 mA,可能導致閉鎖[4]。因此,在MCLR 引腳上施加低電平時,應使用一個50~100 Ω的串聯電阻,而不是將該引腳直接與VSS 連接。
功耗計算公式為:
PDIS = VDD × {IDD - Σ IOH} +
Σ {(VDD - VOH) × IOH} +
Σ(VOL × IOL)
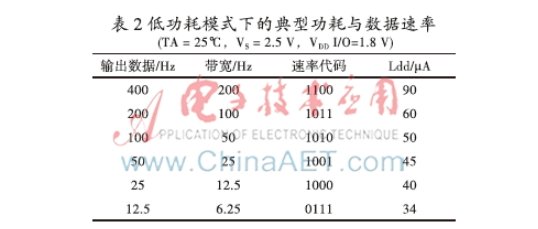
ADXL345是一款小而薄的超低功耗三軸加速度計,分辨率高(13位),測量范圍達±16 g。它具有自動調節功耗功能,與輸出數據速率成比例,如表1所示。如果需要額外省電,可采用低功耗模式。該模式下,內部采樣速率降低,12.5 Hz~400 Hz數據速率范圍內達到省電目的,而噪聲略微變大。要進入低功耗模式,在BW_ RATE寄存器(地址0x2C)中設置LOW_POWER位(位4)。表2為低功耗模式下的功耗,低功耗模式的優勢從中可見。相對于正常功耗模式的數據速率,低功耗模式的數據速率并無任何優勢。

3 硬件與程序設計
3.1 硬件設計
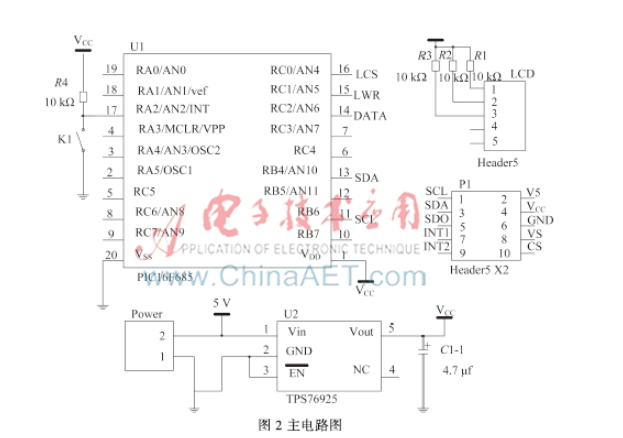
(1)主電路電氣原理圖如圖2所示。
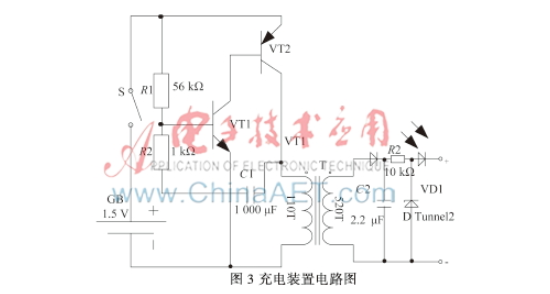
(2)電容充電裝置電路圖如圖3所示。開關S閉合電池對電容C1充電,當C1電壓達到一定電壓值時,使VT1、VT2導通,此時C1通過R1、R2、VT2放電,當C1電壓降到一定電壓值時,VT1、VT2截止,電池再對C1充電,如此重復形成高頻電,通過升壓變壓器升壓后整流輸出,再經穩壓管VD2穩壓給電容充電。
3.2 軟件流程圖與程序設計
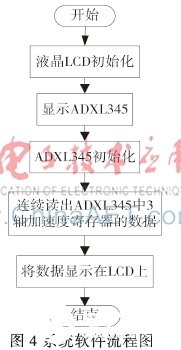
(1)本設計的軟件流程圖如圖4所示。
(2)程序設計
PIC16F685通過I2C方式對ADXL345芯片的內部寄存器進行讀寫操作,從而實現對該芯片的設置和對檢測結果的數據讀取[3]。
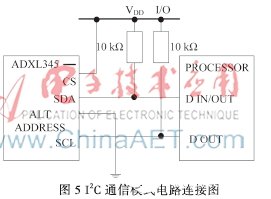
I2C通信模式電路連接圖如圖5所示,CS引腳拉高至VDD I/O,ADXL345處于I2C模式,需要簡單2線式連接。ALT ADDRESS引腳處于高電平,器件的7位I2C地址是0x1D,隨后為R/W位。這轉化為0x3A寫入,0x3B讀取。通過ALT ADDRESS引腳(引腳12)接地,可以選擇備用I2C地址0x53(隨后為R/W位)。
這轉化為0xA6寫入,0xA7讀取。對于任何不使用的引腳,沒有內部上拉或下拉電阻,因此,CS引腳或ALT ADDRESS引腳懸空或不連接時,任何已知狀態或默認狀態不存在。使用I2C時,CS引腳必須連接至VDD I/O,ALT ADDRESS引腳必須連接至任一VDD I/O或接地。
4 系統測試
4.1 測試方案
⑴目的:傾角變化時,能夠達到設計要求,測量斜面傾角,范圍為0°~ 90°。
⑵環境:日常情況,斜面傾角改變。
⑶設備:木板、電解電容、傾角測量裝置。
⑷方法:通過自制充電裝置給電解電容充電,然后電容給傾角測量儀供電;將傾角測量儀放在斜面上固定,手動控制木板變化,顯示器件自動顯示不同數據值,測量斜面傾斜角度。
4.2 測試結果及分析
(1)傾角改變而測量儀在斜面上固定時,實測角度和沿x軸、y軸、z軸方向上的分量顯示結果如表3所示。
(2)傾角固定而測量儀在斜面上旋轉時,實測角度和沿x軸、y軸、z軸方向上的分量測得一組數據如表4所示。

利用絕對誤差和相對誤差公式:

計算表3中的平均絕對誤差為0.4°,平均相對誤差值為0.88%,達到設計要求。同理可計算表4中的數據亦達到設計要求。
5 結論
經過試驗測試分析表明,設計的傾角測量儀能夠達到精度要求,并且能夠滿足實際的需求。實現了實時數字顯示,功耗較低,能夠在實際的工業中有較廣的應用。
參考文獻
[1] 姚曉通. 輕松玩轉PIC單片機C語言[M]. 北京:北京航空航天大學出版社, 2011.
[2] ADI.ADXL345:3-Axis.,±2g/±4g/±8g/16g數字加速度計[DB/OL].[2014-04-15]
[3] Christopher J. Fisher. 利用加速度計進行傾斜檢測[DB/OL].(2010)[2014-04-15]
[4] 邱仁峰,胡曉東. 一種高精度數字傾角測量系統的設計[J]. 電子技術應用, 2005,31(6):38-41.
[5] 花鵬. 基于三軸加速度計的腕式健康監測系統設計[J]. 單片機與嵌入式系統應用, 2013(3):71-74.
編輯:jq
-
機械
+關注
關注
8文章
1529瀏覽量
40469 -
干電池
+關注
關注
1文章
124瀏覽量
181706 -
傾角測量儀
+關注
關注
0文章
4瀏覽量
7158
發布評論請先 登錄
相關推薦
光學透過率測量儀的技術原理和應用場景

如何選擇適合的影像測量儀類別以滿足特定測量需求

測量系統|圖像尺寸測量儀測量亞克力板

全自動影像測量儀概述

噪聲測量儀器的校準過程及注意事項
測量儀器的種類及其作用

直流電參數測量儀詳解

測量系統新秀:全自動影像測量儀(閃測儀)IMAGE 3 Pro-H
蔡司三坐標測量儀CMM的優點
微納米表面輪廓形貌用什么測量儀器





 工商網監
工商網監
評論