 淺談實現高級電動機控制系統的兩個主要因素
淺談實現高級電動機控制系統的兩個主要因素
采用基于帶有無傳感器磁場定向控制(FOC)的永磁同步電動機(PMSM)的高級電動機控制系統,有兩個主要的驅動因素:提高能源效率和加強產品差異化。雖然具有無傳感器FOC的PMSM已被證明可以實現這兩個目標,但需要一種提供整體解決方法的生態系統。
為什么選擇PMSM?
PMSM電動機是使用電子換向的無刷電動機。它經常與無刷直流電動機(BLDC)混淆,后者是無刷電動機家族的另一成員,它也使用電子換向,但結構略有不同。PMSM的結構針對FOC進行了優化,而BLDC電機經過優化以使用6步切換技術。優化導致PMSM具有正弦反向電動勢(Back-EMF),而BLDC電機具有梯形反向電動勢。
這些電動機中的轉子傳感器也不同。PMSM通常使用位置編碼器,而BLDC電機使用三個霍爾傳感器進行操作。如果需要考慮成本,設計人員可以考慮采用無傳感器技術,從而消除了磁體、傳感器、連接器和布線的成本。由于減少了系統中可能發生故障的組件,因此消除傳感器還提高了可靠性。當將無傳感器PMSM與無傳感器BLDC進行比較時,使用FOC算法的無傳感器PMSM可以提供更好的性能,同時使用類似的硬件設計,并且實現成本相當。
切換到PMSM的最大受益者是那些當前使用有刷直流(BDC)或交流感應電動機(ACIM)。開關的主要優點包括更低的功耗,更高的速度,更平穩的轉矩,更低的噪聲,更長的使用壽命以及更小的尺寸,從而使該技術更具競爭力。但是,為了通過使用PMSM實現這些好處,開發人員需要實現更復雜的FOC控制技術以及其他特定于應用的算法,以滿足系統需求。與BDC或ACIM相比,PMSM更為昂貴,但它提供了更多優勢。
實施挑戰
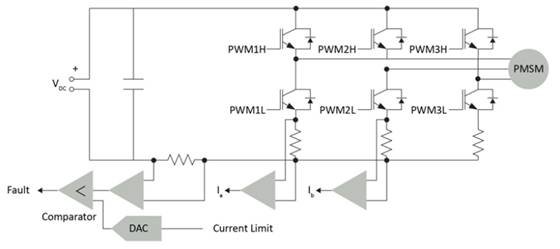
但是,要實現使用PMSM的優勢,需要了解實現先進的FOC電機控制技術所固有的硬件復雜性,以及所需的領域專業知識。圖1顯示了使用三相電壓源逆變器的三相無傳感器PMSM控制系統。控制逆變器需要三對相互關聯的高分辨率PWM信號,以及大量需要信號調理的模擬反饋信號。該系統還需要具有容錯的硬件保護功能,該功能使用高速模擬比較器進行設計以實現快速響應。感測、控制和保護所需的這些額外的模擬組件會增加解決方案成本,典型的BDC電機設計或ACIM的控制不需要這些。
定義和驗證PMSM電機控制應用的組件規格還需要額外的開發時間。為了應對這些挑戰,設計人員可以選擇微控制器,可以提供高度的模擬集成,并具有針對PMSM電機控制量身定制的設備規格。這將減少所需的外部組件數量,并優化物料清單(BOM)。高度集成的電機控制設備現已提供高分辨率PWM,以方便實施高級控制算法,用于精密測量和信號調節的高速模擬外設,功能安全所需的硬件外設以及用于通信和調試的串行接口。
同樣具有挑戰性的是電動機控制軟件與電動機機電行為之間的相互作用。圖2顯示了標準的無傳感器FOC框圖。要將其從一個概念應用于實際設計,需要了解控制器架構和數字信號處理器(DSP)指令,以實現對數學要求嚴格的時間緊迫的控制回路。
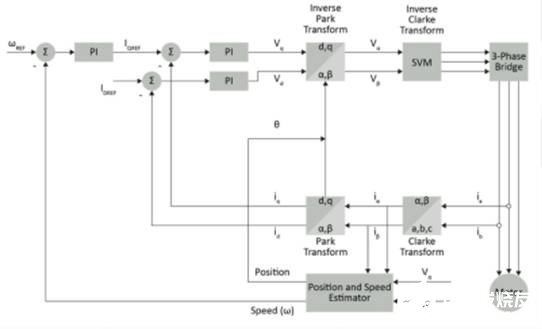
圖2:標準無傳感器FOC的框圖
為了獲得可靠的性能,控制回路必須在一個PWM周期內執行。需要對控制回路進行時間優化的三個原因。
1)約束:使用等于或大于20KHz(50uS時間段)的PWM開關頻率來抑制逆變器開關產生的噪聲。
2)為了獲得更高帶寬的控制系統,控制回路必須在一個PWM 周期內執行。
3)為了支持其他后臺任務,例如系統監視,特定于應用程序的功能和通信,控制回路需要運行得更快。FOC算法的目標應是在少于10uS的時間內執行。
許多制造商都提供了FOC展示軟件,該軟件帶有用于轉子位置的無傳感器估算器。但是,在FOC算法甚至無法開始旋轉電動機之前,必須配置各種參數以使其與電動機和硬件相匹配。為了滿足所需的速度和效率目標,必須進一步優化控制參數和系數。這可以通過以下組合實現:1)使用電機數據表推導參數,2)通過試錯法進行實驗。當電動機參數可能無法始終準確地表征電動機參數時,或者當設計人員無法使用高精度測量設備時,開發人員將不得不采用試錯法。手動調整的過程需要時間和經驗。
PMSM電動機用于許多不同的應用,可在不同的環境中運行或具有不同的設計限制。例如,在汽車散熱器風扇中,當發動機將要啟動時,由于風的作用,風扇葉片可沿反方向自由旋轉。在這種情況下,使用無傳感器算法啟動PMSM電機是一項挑戰,可能會損壞逆變器。一種解決方案是檢測旋轉方向和轉子位置,并使用此信息通過主動制動,在啟動電動機之前使電動機減速至停止狀態。同樣,可能有必要實施其他算法,例如每安培最大轉矩(MTPA),轉矩補償和弱磁等。這些類型特定于應用程序的附加算法對于開發實用的解決方案是必不可少的,但它們也會因為增加開發時間和軟件驗證復雜化而增加設計復雜性。
降低復雜度的一種解決方案是讓設計人員創建一種模塊化軟件體系結構,該體系結構使特定于應用程序的算法可以添加到FOC算法中,而不會影響時間緊迫的執行。圖3顯示了典型的實時電機控制應用程序的軟件架構。該框架的核心是FOC功能,它具有嚴格的時序約束和許多特定于應用的附加功能,框架中的狀態機負責控制功能與主應用程序接口。該體系結構需要在軟件功能塊之間有一個定義明確的接口,以使其模塊化并簡化代碼維護。模塊化框架支持將不同的特定于應用程序的算法與其他系統監視,保護和功能安全案例進行集成。
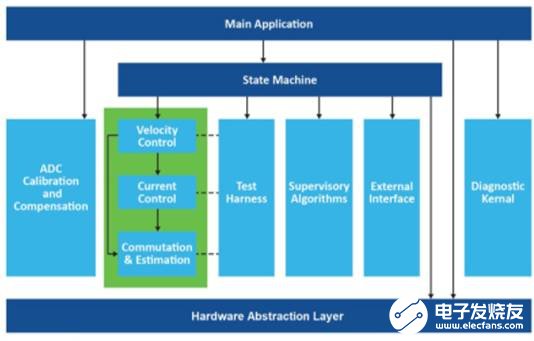
圖3:FOC的應用框架
模塊化體系結構的另一個好處是將外圍接口層(或硬件抽象層)與電機控制軟件分離,這使設計人員可以隨著應用程序和性能要求的變化將IP無縫地從一個電機控制器遷移到另一個電機控制器。
完整生態系統的要求
為了應對這些挑戰,需要針對無傳感器FOC設計量身定制的電機控制生態系統。電機控制器,硬件,軟件和開發環境都應一起工作,以簡化實現高級電機控制算法的過程。為此,生態系統應具有以下功能:
1.一種高級工具,可自動執行電機參數測量,設計控制環并生成源代碼,使沒有專業知識的設計人員也可以實現FOC電機控制以及編寫和調試非常耗時的關鍵代碼。
2. FOC的應用程序框架和不同的特定于應用程序的附加算法減少了開發和測試時間。
3.具有確定性響應的電機控制器和集成的模擬外設,可在單個芯片中進行信號調理和系統保護,從而降低了解決方案的總成本。
圖4顯示了一個電機控制生態系統架構的示例,其中包括應用程序框架和用于高性能dsPIC33電機控制數字信號控制器(DSC)的開發套件。該開發套件基于GUI的FOC軟件開發工具構建,該工具可以測量關鍵的電機參數并自動調整反饋控制增益。它還使用Motor Control應用程序框架(MCAF)為在開發環境中創建的項目生成所需的源代碼。解決方案堆棧的核心是電機控制庫,它使實現應用程序的時間緊迫的控制回路功能以及與dsPIC33 DSC的電機控制外設進行交互成為可能。這個GUI與多個可用的電機控制開發板配合使用,以支持電機參數提取以及適用于各種低壓和高壓電機的FOC代碼生成。

圖4:Microchip Technology電機控制生態系統架構
對高能效和產品差異化的需求推動了向無刷電機的過渡。 全面的電機控制生態系統提供了一種整體方法來簡化帶有PMSM的無傳感器FOC的實現,并且應包括專用的電機控制器,快速原型開發板和易于使用的FOC開發軟件,以實現代碼自動生成。
編輯:lyn
-
PMSM
+關注
關注
14文章
244瀏覽量
41824 -
FOC
+關注
關注
20文章
318瀏覽量
42650 -
永磁同步電動機
+關注
關注
14文章
74瀏覽量
12048 -
電動機控制
+關注
關注
1文章
17瀏覽量
10767
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論