 微型機器人如何通過光電晶體管來感知外界?
微型機器人如何通過光電晶體管來感知外界?
該項目主要介紹了三個微型機器人,它們有很多相似之處,如:控制器、電池以及它們的運動機制,而且它們都是通過光電晶體管來感知外界。但是它們具有不同的功能。
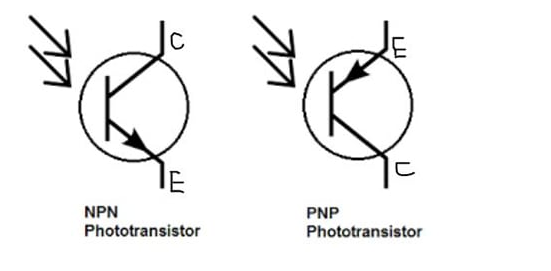
在該設計中,至少需要一只光電晶體管和一個LED,這是進行交互的必要條件。交互的類型取決于機器人的類型。例如,機器人1的視線是指向下方以掃描表面,而機器人3則僅向前看。
它們是像機器人之間的數據傳輸一樣復雜,還是像干擾其他機器人的視線一樣簡單,取決于它們的編程方式。
我還沒有對它們進行復雜的編程,所以,它們的主要行為特征為:
機械手1-左眼和右眼向下看。可以檢測地面上的亮度模式,它充當的是線路跟隨者。
機械手2-一只眼睛向下,一只向前。控制其發光二極管周圍的一組LED。它可以看到地面的亮度并向前看。它也可以通過LED向各個方向發出信號。
機械手3-一只眼睛向前看,兩個獨立控制的LED指向左右兩側成45度角。它應該能夠檢測到障礙物并確定應轉向哪個方向以避開障礙物。我仍在開發此功能。
硬件:
所需組件:
ATtiny85.。..。..。..。..1個 (控制器可以是任意8個引腳的ATtiny)
2N7002K MOSFET.。..。..。..。..2個
小型馬達。..。..。..。...2個
紅色LED.。..。..。..。..一些
ASDL-6620光電晶體管。..。..。..。..。一些
LIR2032 3.6V可充電鋰紐扣電池。..。..。..。...1個(續航時間較短)
原理圖:
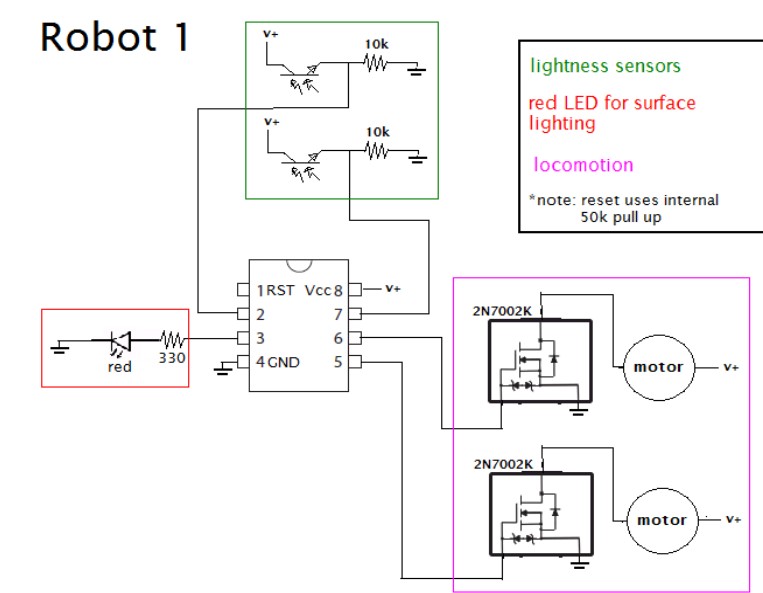
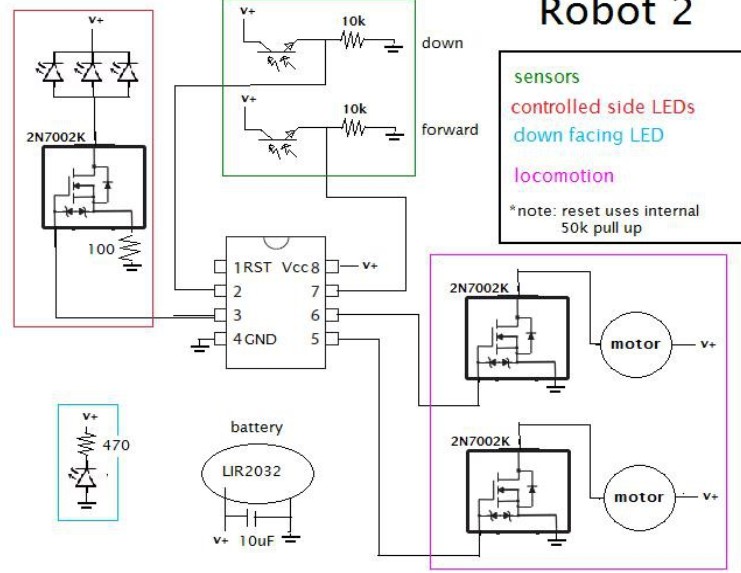
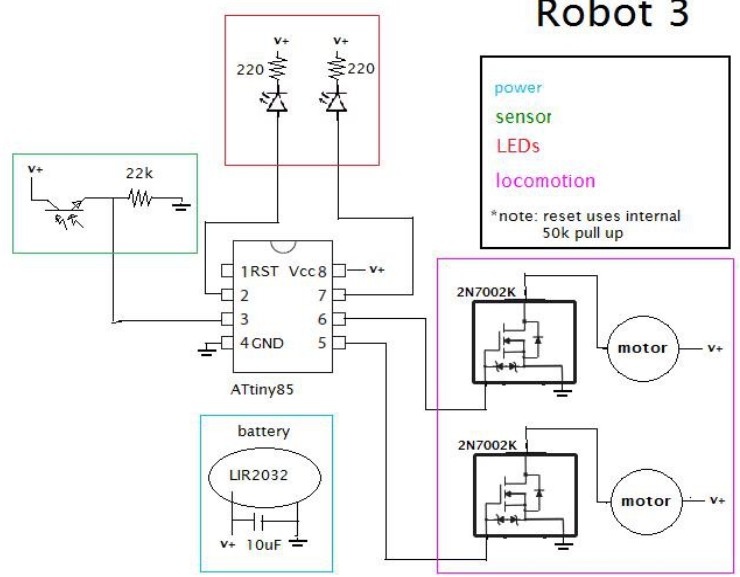
機器人底部示意圖
軟件:
主循環僅調用行為函數,所以可以很容易的在代碼中添加其它的行為函數:
機器人1遵循一條行為;
機器人2掃描地面,并可以向該區域的其他機器人發出信號;
機器人3避開了障礙物(仍在該障礙物上工作)。
責任編輯:pj
-
led
+關注
關注
241文章
23136瀏覽量
658446 -
微型機器人
+關注
關注
0文章
111瀏覽量
19534 -
光電晶體管
+關注
關注
0文章
64瀏覽量
10864
發布評論請先 登錄
相關推薦
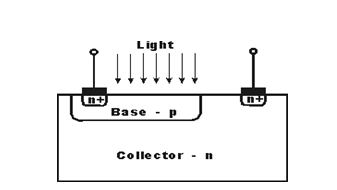
光電二極管和光電晶體管的工作原理
什么是光電晶體管以及其應用
什么是光電晶體管,光電晶體管電路解析
光電晶體管工作原理與結構特點

光電晶體管工作原理
光電晶體管的結構特點
光電晶體管的優點
光電晶體管的應用
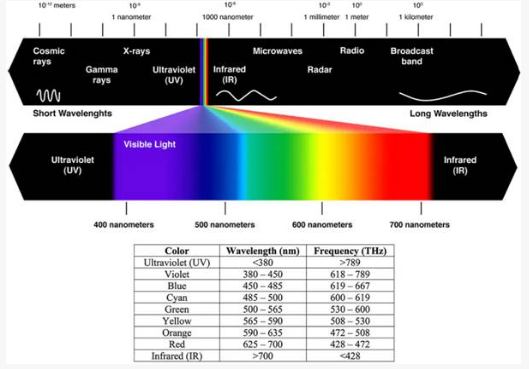
光電二極管和光電晶體管的常用光譜
光電晶體管的工作原理和用途
光電晶體管的工作原理,如何使用光電晶體管構建一個自動開關
什么是光電晶體管?光電晶體管的工作原理和結構





 工商網監
工商網監
評論