 基于使用A4988驅動程序和HC-05 bt模塊構建自平衡機器人
基于使用A4988驅動程序和HC-05 bt模塊構建自平衡機器人
您好朋友,這篇文章是關于DIY自平衡機器人的,我將向您展示如何構建自己的自平衡機器人。
我使用定制的PCB,Arduno nano,MPU6050,A4988驅動程序,HC-05 bt模塊,MDF板和一些硬件來構建此自平衡機器人,
詳細材料清單可在本文中找到。
Balancingwii固件和EZ-GUI此項目中使用 android應用程序通過藍牙連接控制機器人。
因此,讓我們從一些基本的自平衡機器人開始。
自平衡機器人的基礎知識:
自平衡機器人是指機器人通過不斷地調整其位置來平衡自己在兩個輪子上的位置。
陀螺儀傳感器用于自平衡機器人中,該傳感器連續將機器人方向數據發送到控制器。
根據該數據控制器的命令,電機正轉或反轉以保持機器人的筆直位置。
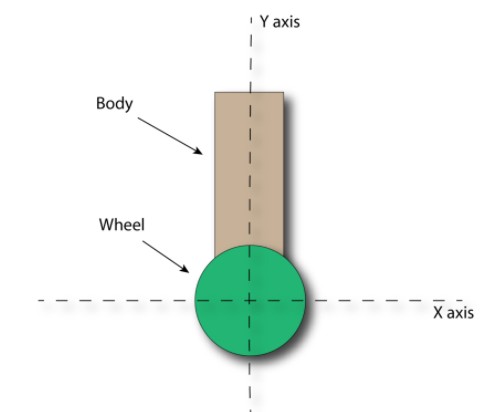
這是自平衡機器人的理想位置,身體完美地向上注視著車輪。Y軸與機器人的身體之間的夾角為零。
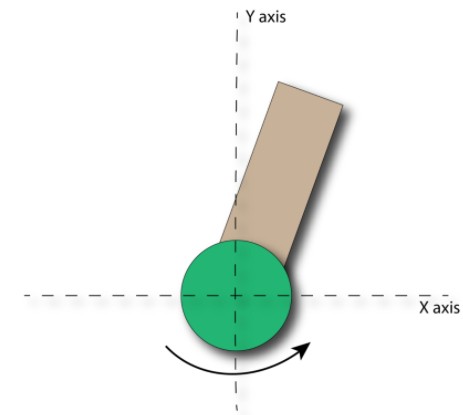
當身體向前傾斜時,Y軸與身體之間會存在一定角度。
MPU6050陀螺儀傳感器檢測到該角度,然后將此數據發送到Arduino。
正向運行,以將傾斜角最小化到零度。
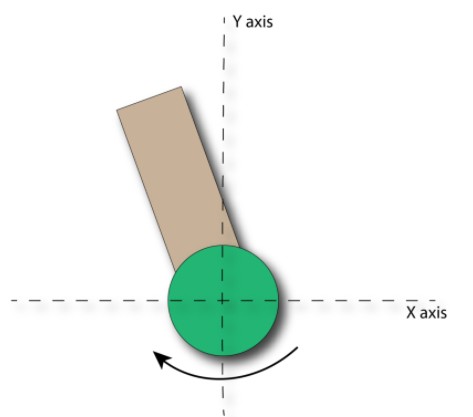
如果機器人向后傾斜,電機將向后旋轉并將傾斜角校正為零,也會發生同樣的情況。
機器人繼續以每秒400次的速度向前和向后反轉電動機,因此我們看起來它就像機器人在其位置上一樣穩定。
所需組件
Arduino Nano………………………。.1號
MPU605陀螺儀傳感器……………….1號
Nema 17步進電機………….2號
100mm車輪…………………………。.2號
HC-05藍牙模塊………….1號。
4mm MDF板。
150mm M5螺紋桿——4個
一些螺母和螺栓
責任編輯:pj
-
控制器
+關注
關注
112文章
15886瀏覽量
175403 -
機器人
+關注
關注
210文章
27839瀏覽量
204620 -
驅動程序
+關注
關注
19文章
798瀏覽量
47779
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論