 基于使用Arduino板及電機驅動器對機器人進行編程介紹
基于使用Arduino板及電機驅動器對機器人進行編程介紹
我的項目是一個簡單的直線跟隨器機器人。顧名思義,它是可以跟隨直線的機器人。在這種情況下,它是白色表面上的黑線。在本教程中,我將解釋如何制作追隨者機器人,并展示由我自己制造的機器人。
我決定以娛樂為目的。我從RoboIndia購買了Arduino入門套件。無需使用該套件即可制作。但是,這樣做很容易,因為您不必搜索單個組件。
這是必需組件的完整列表:
1.底盤-通常必須購買底盤,但也可以是木材,您可以自行購買。
2.Wheels-這些通常必須是橡膠輪。
3.電池盒-用于放置電池并運行機器人。應該適合6節AA電池。
4. Arduino開發板
5.電機罩。一個簡單的電動機罩就足夠了,并且有用于連接到Arduino板的地方。通常,由于電動機屏蔽板與Arduino板直接連接,因此,如果您將某些東西連接到電動機屏蔽板上的引腳,則它將連接到Arduino板。
7. BO電機:-這些是實際上將用于轉動車輪的電機。其中2個就足夠了。
8.腳輪-這是超市手推車中使用的輪子。
現在,讓我們開始制造機器人!組裝起來并不難。所有需要做的就是將輪子放在機器人下面。紅外傳感器的放置方式應使其上的兩個LED面向機器人將要運行的表面。HC SR04應該放置在您認為可以檢測到其他物體的地方。最好在更高的地方比較好,盡管這完全取決于您。電池組可以放置在任何地方。我將其連接在主機架下。
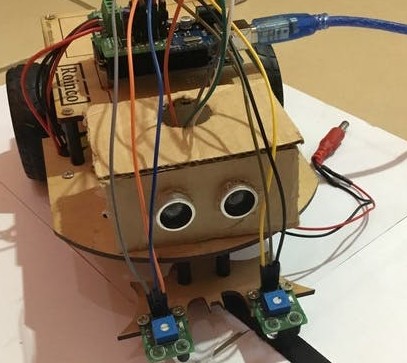
在這里,您可以看到紅外傳感器朝下,HC SR04被一個盒子包圍,而Arduino板在頂部。
從組件到電路板的連接非常重要。電機應連接到電機驅動器。我的是L293D。
在BO Motors中,一根線用于向后移動,而另一根線用于向前移動。因此,在將電線連接到電動機屏蔽罩時,通常最好將同一電動機的兩條電線彼此相鄰連接。我的電機護罩是從RoboIndia購買的,帶有用于放置電線位置的標簽。
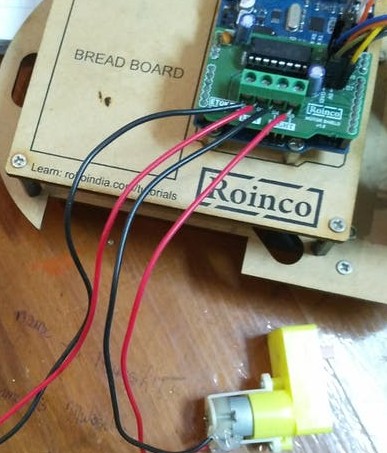
電機連接到電機護罩
所有其他組件必須正常連接。它們可以連接到Arduino或電動機護罩,因為許多電動機護罩已經連接到Arduino。您將需要確認電機屏蔽罩上的引腳號是否與Arduino上的引腳號匹配。紅外傳感器具有三根導線。這是將紅外傳感器連接到Arduino的方法:
紅外線-》 Arduino
5v-》 5v
地線-》地線
D-》您想要的任何圖釘。我的紅外傳感器連接到引腳7和8。我的左傳感器連接到引腳7,我的右傳感器連接到引腳8。
我的電動機屏蔽罩帶有用于5v和GND的多個引腳。如果電動機護罩不是這種情況,請考慮使用面包板。這些連接很容易理解。紅外傳感器需要有5v的電源,然后應將其接地以完成電路。需要一個引腳來對傳感器進行編程!
接下來是HC SR04的連接。如果我們可以連接它,那么我們就完成了!
HC SR04-》 Arduino的
VCC-》 5伏
回聲-》任何銷
觸發-》任何銷
我已將Echo連接到引腳10,將Trig連接到引腳9。HC SR04可以計算從它到最前面物體的距離。觸發發送聲音脈沖,而回聲接收聲音脈沖。使用為此花費的時間,可以計算出距離。但是,在我的代碼中,我正在使用一個庫來簡化事情。
這就是設置所需要的。最后一點也是非常明顯的,就是將電池放入電池盒中。現在,我們可以對機器人進行編程了。我在下面詳細解釋了代碼。
在深入研究代碼之前,必須必須了解機器人的工作方式。
? 首先測量到最近物體的距離。
? 如果距離超過29厘米,則表示機器人不會停止。
? 然后,它檢查紅外傳感器。
? 如果左紅外傳感器檢測到黑色,則機器人將向左移動以校正其路徑。
? 如果右側的紅外傳感器檢測到黑色,它將向右移動以校正其路徑。
? 當兩個紅外傳感器都檢測到白色時,它將向前移動。
? 最后,如果兩個紅外傳感器都檢測到黑色,它將停止。這有利于使其停止。
現在,介紹機器人如何執行動作。
? 為了向前移動,兩個電動機都必須沿向前方向旋轉。很簡單。
? 要向右轉,右馬達必須停止,只有左馬達必須向前旋轉。
? 要向左轉,左電動機必須停止,而只有右電動機必須向前旋轉。
? 要停止,兩個電動機都必須停止旋轉。
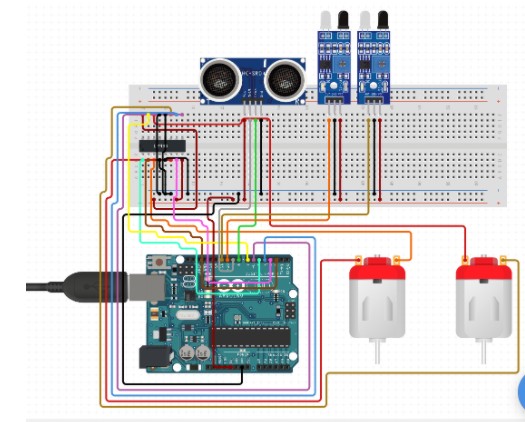
原理圖:
責任編輯:pj
-
電機驅動器
+關注
關注
16文章
633瀏覽量
64620 -
紅外傳感器
+關注
關注
9文章
515瀏覽量
47519 -
Arduino
+關注
關注
187文章
6464瀏覽量
186676
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論