 講解雙DSP的雷場偵察圖像實時壓縮及存儲方法研究
講解雙DSP的雷場偵察圖像實時壓縮及存儲方法研究
該系統利用TMS320C62xx系列DSP的快速數據處理能力和雙口RAM的高速數據傳輸能力,對光學傳感器拍攝到的大面積雷場圖像進行快速GPS標定,并對標定后的圖像進行實時壓縮、存儲和傳輸,可滿足機載大面積雷場偵察系統的實時性要求。
l 引言
以直升機(有人機或無人機)為平臺,利用可見光成像和紅外成像傳感器技術,可以晝夜進行遠距離、大面積雷場偵察及其他障礙體系的偵察。當機載雷場偵察系統執行任務時,系統對接收的雷場圖像進行GPS標定,同時將標定的圖像實時壓縮、存儲和傳輸。該系統具有極高的實時性要求。
因此,考慮在系統中采用雙DSP和復雜可編程邏輯器件(CPLD)為核心來構建高速處理體系。一方面,采用雙DSP體系結構可以使系統具備極高的運算處理速度,滿足實時性要求,另一方面,CPLD的引入使系統的靈活性得到了很大的提高。將二者結合可使該系統充分體現新一代圖像壓縮系統更快速、更靈活的特點。
2 TMS320C62XX系列DSP的特點
根據圖像壓縮和存儲系統的特點,采用美國德州儀器(TI)公司的TMS320C62xx系列定點DSP作為核心處理器。其主頻為200 MHz~300 MHz,數據處理能力為1600 MI/s~2400 MI/s。它的主要特點如下:
(1)DSP內核采用超長指令字(VLIW)體系結構,8個功能單元共用32個32 bit通用寄存器,最多可在一個周期內同時執行8條32位指令,從而大大提高了程序的執行速度;
(2)電路內部集成了l Mbit~7 Mbit片內SRAM,分為內部程序/Cache存儲器和內部數據/Cache存儲器,不存在片內存儲器與外部存儲器的總線競爭和訪問速度不匹配問題,因此訪問速度快,可以充分利用DSP強大的數據處理能力;
(3)具有32 bit外部存儲器接口(EMIF),外部存儲器可尋址空間高達52 MByte。可與SDRAM和SBRAM實現無縫連接,用于大容量高速存儲。其直接異步存儲器接口可與SRAM和EPROM連接,用于小容量數據存儲和程序存儲。
3 系統硬件設計
按功能劃分,圖像壓縮及存儲系統包括圖像采集模塊、GPS數據采集模塊、CPLD邏輯控制模塊、雙口RAM+雙DSP圖像處理模塊、圖像實時存儲模塊和壓縮數據輸出模塊。
為滿足系統實時性要求,整個系統的設計使用3個DSP,其中1個用于壓縮數據的實時存儲,2個采用級聯方式工作的DSP用于雷場圖像的實時壓縮和傳輸。系統結構如圖l所示。
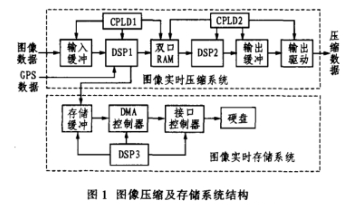
DSPl接收成像設備產生雷場圖像數據和GPS定位系統產生定位數據,并根據GPS定位數據標定雷場圖像,然后對標定后的圖像進行實時壓縮。DSP2對壓縮后的雷場圖像依次進行量化重排、信源編碼和信道編碼,并將編碼后的圖像通過數傳機發送到地面。DSP3主要負責控制壓縮數據的實時存儲。
3.1 圖像采集模塊
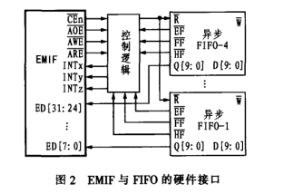
本系統采用圖1所示的DSPl的EMIF來實現與可見光成像傳感器和紅外成像傳感器之間的通信,采集雷場的可見光圖像和紅外圖像信息。由于DSPl的EMIF接口是32位,而圖像數據的輸入字寬為8位,為了充分利用DSP的資源,使系統滿足快速傳輸處理的要求,設計時在傳感器和DSPl之間使用4個8位異步FIFO存儲器作為圖像數據的輸入緩沖。FIFO與EMIF之間的硬件接口如圖2所示。
圖2中的控制邏輯通過圖l的CPLDl來實現。CPLD1根據系統所需要的時序,控制產生EMIF的片選信號(CEn)、異步輸出允許信號(AOE)、異步寫允許信號(AWE)、異步讀允許信號(ARE),同時通過接收FIFO的空標志(EF)、滿標志(FF)及半滿標志(HF)來產生DSP的中斷信號(INTx、INTy、INTz),從而實現4個異步FIFO的讀寫操作。
3.2 GPS數據采集模塊
通過各種光學設備拍攝到的雷場圖像必須標定上相應的地理坐標信息才能使其具有實際意義。因此,系統的輸入數據除了雷場圖像數據外還應包含相應的GPS定位數據。
由GPS定位系統根據偽距差分定位原理計算出的GPS定位數據按照整秒輸出,輸出接口為RS-232型串行接口。TMS320C62xx系列DSP帶有3個多通道緩沖串口(McBSP0——McBSP2),考慮到McB-SP串口的電氣特性與RS-232串口的電氣特性之間存在差異,設計時在DSPI的McBSP接口上外接1個RS-232收發器,以便實現串口通訊,接收GPS定位數據。
3.3 CPLD邏輯控制模塊
為了協調系統中每個功能獨立的電路高效率工作,使用了2個復雜可編程邏輯器件(CPLD)控制DSP內部多段內存空間的訪問,并管理DSP與雙口RAM和FIFO之間的訪問時序。
此外,由于光學設備的數據輸出字寬為8位、TTL電平,而DSP的EMIF接口是32位、LVTTL電平。因此,CPLD還必須通過控制相應的接口電路來解決因光學設備與DSP之間的接口差異而產生的問題,從而保證整個系統有序、高效的運行。
3.4 雙口RAM+雙DSP圖像處理模塊
作為圖像壓縮和存儲系統的核心,圖像處理模塊以雙DSP為運算處理核心單元,并輔以雙口RAM實現2個DSP之間的高速通信。2個DSP的外部存儲器接口EMIF與雙口RAM之間的接口設計如圖3所示,圖中的雙口RAM采用的是32位異步RAM。
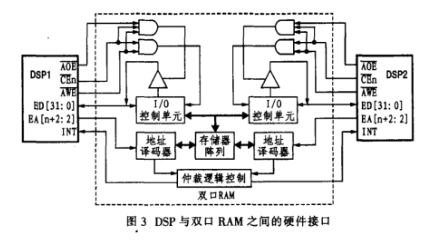
在圖3所示的2個DSP中,DSPl的功能如下:
接收雷場原始圖像數據和GPS定位數據;
對雷場圖像數據進行GPS標定;
通過EXBUS將GPS標定后的圖像存儲到硬盤上;
使用快速離散余弦變換(FDCT)對GPS標定后的雷場圖像進行實時壓縮;
將壓縮數據通過外部存儲器接口EMIF和雙口RAM傳送給DSP2。
DSP2的主要功能如下:
通過外部存儲器接口EMlF和雙口RAM接收來自DSPI的壓縮數據;
將壓縮數據量化重排;
對量化重排后的壓縮數據進行信源和信道編碼;
將編碼后的數據通過數傳設備發送給接收站。
作為2個DSP之間高速通信橋梁的雙口RAM是一個共享式多端口存儲器,它配備2套獨立的地址線、數據線和控制線,允許2個獨立的DSP同時異步地訪問存儲單元,從而實現存儲數據的共享,大大提高了2個DSP之間的通信速度。
雙口RAM內部的訪問仲裁邏輯通過控制同一地址單元訪問的時序、合理分配存儲單元數據塊的訪問權限、有序調度信令交換邏輯(例如中斷信號)等手段來管理2個DSP對雙口RAM的讀寫操作,從而實現DSPI和DSP2對存儲器內共享數據的有序訪問。
2個DSP雖然能通過雙口RAM進行高速通信,但其控制功能不強,因此系統中需要采用如圖1所示的2個CPLD協調DSPl和DSP2對雙口RAM中共享數據的訪問,從而實時快速地實現雷場圖像數據的標定、壓縮、存儲和傳輸。
3.5 圖像存儲模塊
原始圖像數據經過GPS標定后進行存儲,作為地面接收的雷場圖像數據的備份。由于光學設備所拍攝的雷場數據具有低空、大速高比、高分辨率的特點,是海量數據,因此,必須使用硬盤進行存儲。為了避免圖l所示的DSPI內部硬件資源發生沖突,使用DSPI的EXBUS作為圖像存儲數據輸出的接口。
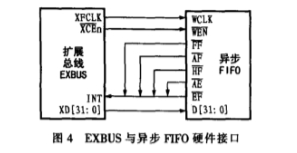
經過GPS標定的雷場圖像數據通過DSPl的EXBUS接口首先輸出到FIFO中緩沖,然后分別通過DMA控制器和接口控制器將壓縮數據存儲到硬盤上。對硬盤的控制采用DSP3和專用SCSl接口控制器來實現數據的存儲。EXBUS與異步FIFO之間的硬件接口如圖4所示。
3.6 壓縮數據輸出模塊
經GPS標定的雷場圖像數據在使用特定的算法壓縮后,必須傳送到地面進行后期分析處理。壓縮數據經過DSP2編碼后,通過DSP2的EMIF傳送到FIFO中緩沖,然后通過總線驅動送到數傳設備,傳至地面接收站。FIFO存儲器采用IDT72V06型異步FIFO存儲器,總線驅動器采用SGS-THOMSON公司的HC245型總線驅動器。
4 圖像壓縮算法設計
圖像壓縮算法效率的高低直接影響整個系統的實時性,因此,選用合適的圖像壓縮算法具有至關重要的意義。
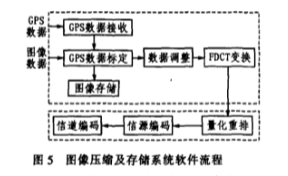
該系統采用基于FDCT變換的圖像壓縮算法,該算法能夠在圖像質量比較好的情況下取得較高的壓縮比,且計算量適中,能夠滿足圖像實時壓縮的要求,其軟件流程如圖5所示。圖5中上部虛框內的算法由DSPl執行,下部虛框中的算法由DSP2執行,中間數據通過雙口RAM傳遞。
由于壓縮過的數據具有非常低的冗余度,因此在信源編碼時須適當插入RoI(Restart of Interval)標志,增強壓縮數據的抗誤碼能力,避免發生誤碼擴散。
此外,為提高通信的可靠性,在編碼中還要加入信道編碼。考慮到卷積碼的前向糾錯能力和實時性較好,選擇卷積碼作為信道編碼。從理論上講,卷積碼的約束度越長糾錯能力越好,但是約束度越長,譯碼時間也會相應變長。因此,在設計時必須從實時性出發,選擇合適的卷積碼約束度,從而保證數傳設備的誤碼率糾錯能力能夠滿足系統的實時性、可靠性和抗干擾性要求。
5 結束語
該系統利用TMS320C62xx系列DSP的快速數據處理能力和雙口RAM的高速數據傳輸能力,對光學傳感器拍攝到的大面積雷場圖像進行快速GPS標定,并對標定后的圖像進行實時壓縮、存儲和傳輸,可滿足機載大面積雷場偵察系統的實時性要求。
作者:周新建;張國進;高攀;高朝瑞
編輯:jq
-
gps
+關注
關注
22文章
2883瀏覽量
166034 -
RAM
+關注
關注
8文章
1367瀏覽量
114527 -
圖像數據
+關注
關注
0文章
52瀏覽量
11271 -
SGS
+關注
關注
0文章
63瀏覽量
9076
發布評論請先 登錄
相關推薦
基于 DSP5509 進行數字圖像處理中 Sobel 算子邊緣檢測的硬件連接電路圖
雙核dsp和單核dsp的區別
卷積神經網絡的壓縮方法
機器人視覺技術中常見的圖像分割方法
基于FPGA的陣列相機的實時監測和大容量存儲
FPGA設計經驗之圖像處理
基于FPGA的實時邊緣檢測系統設計,Sobel圖像邊緣檢測,FPGA圖像處理
基于門控線性網絡(GLN)的高壓縮比無損醫學圖像壓縮算法






 工商網監
工商網監
評論