 基于SMARS 機器人的3D打印部件設計
基于SMARS 機器人的3D打印部件設計
像往常一樣,我制作了本教程來指導您逐步制作自己的機器人,并開始學習如何制作可控機器人,以及如何控制它們,這個項目可能是機器人技術領域的一個很好的開端。 在創建該項目的過程中,我們試圖確保該指導手冊將是您的最佳指南,以便在您想要制作自己的機器人時為您提供幫助,因此我們希望該指導手冊包含所需的文檔。從JLCPCB 訂購以定制定制PCB來改善電子設備的外觀后,該項目特別容易制作, 并且本指南中有足夠的文檔和代碼可讓您創建漂亮的機器人。我們僅用了4天就完成了這個項目,只用了一天就可以獲取所有必需的零件并完成硬件的制作和組裝,然后花了一天的時間準備適合我們項目的代碼,然后花了兩天的時間來創建android應用我們已經開始測試和調整。
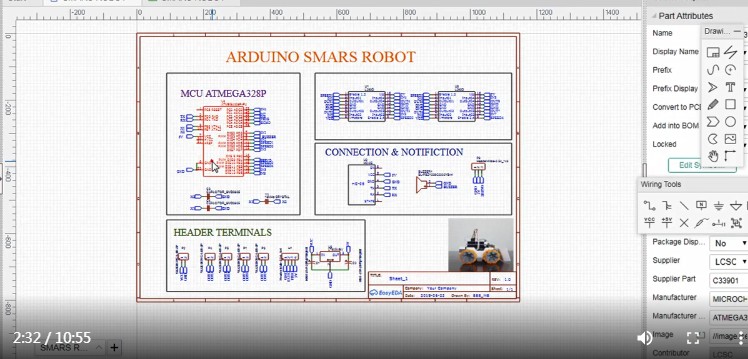
步驟1:電路圖
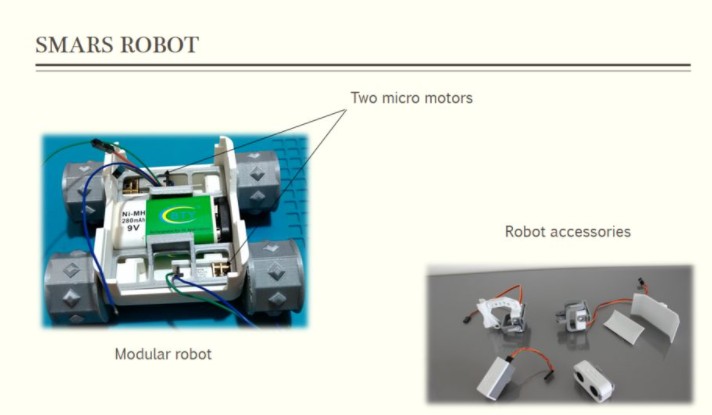
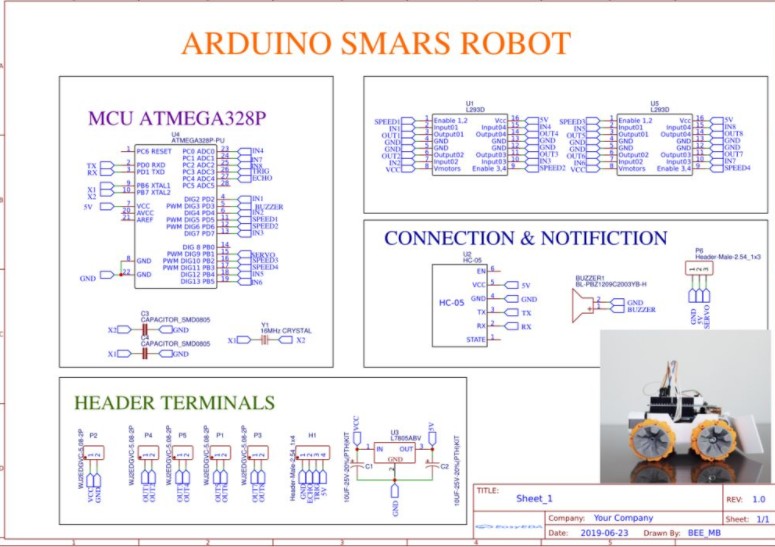
像往常一樣,我會嘗試為觀眾提供一些簡單的項目,以便每個人都可以嘗試,并且基于SMARS 機器人的3D打印部件,今天的項目也很容易。 您可以按照自己的機器人進行很多設計,以及可以添加到機器人中的附件很多,但是對于我們的項目,我們將從基本設計入手,因此其中沒有太多附件,但是我們將發布在接下來的視頻中,如何為我們的小型機器人添加更多功能。 轉到 控制部分,如上面的電路圖所示,我們將使用 您可以從 Arduino UNO 板上獲得的 ATmega328 MCU,該MCU通過L293 H橋驅動器驅動兩個微型電機,如您所見,添加了兩個電機驅動器,以便在您的機器人是四電機機器人的情況下可以使用此電路圖,此外,我們還具有蜂鳴器輸出,伺服電機輸出控件,藍牙連接引腳和超聲傳感器輸入,所有這些功能都可以實現制作相同的電路圖時,請嘗試一下。 最后一個組件是5V電壓調節器,在這里是必需的,因為我們使用9V電池為機器人供電,并且需要將電壓降低到5V才能為MCU和電機供電。
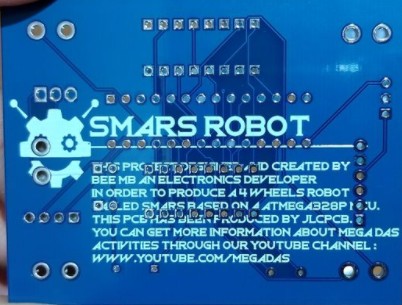
步驟2:PCB制作
在開始焊接電子零件之前,讓我們檢查一下我們項目的電子零件清單,我們需要:
PCB、一個Arduino Uno、ATmega328、MCUL293電機驅動器、 HC05藍牙模塊: L7805穩壓器、2個10 uF的通孔電容器、16 Mhz振蕩器 、蜂鳴器、 2個直流微型電機、9V電池。
步驟3:硬件組裝
烙鐵切勿觸摸烙鐵的元件。用鑷子或夾子固定要加熱的電線。不用時,請務必將烙鐵放回原位。切勿將其放在工作臺上。不使用時,請關閉設備并拔下電源插頭。如您所見,由于該PCB的高品質制作,因此使用它非常容易,并且在焊接每個組件時不會忘記會引導您的標簽,因為您會在頂層的絲綢層上找到每個組件的標簽,指示其在板上的位置。這樣,您將100%確保不會犯任何焊接錯誤。我已將每個組件焊接到其位置,并且可以使用PCB的兩面來焊接電子組件。
步驟4:組裝機器人
從車輪的鏈條開始,我們需要這32個鏈條零件的每一側16個零件,并且我們使用了這種塑料長絲,我們將其切割了30個零件,每個零件的長度為15毫米然后將鏈條零件固定在一起,您可以使用一些膠水確保鏈條保持連接狀態,現在我們將機器人底盤和這兩個空轉輪組裝在一起,然后將9V電池和微型電動機放到它們的位置,然后將主動輪組裝到電動機上,最后但同樣重要的是,我們將鏈條連接起來以將輪彼此連接,最后一步是擰緊輪線和9V電池,然后將PCB插入其插座,機器人現在可以移動了。
步驟5:軟件零件和測試
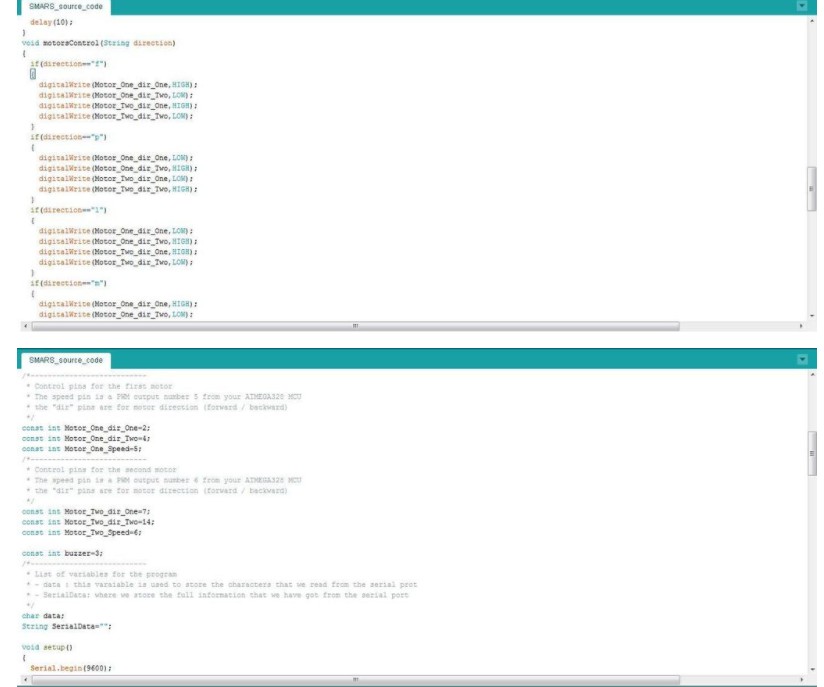
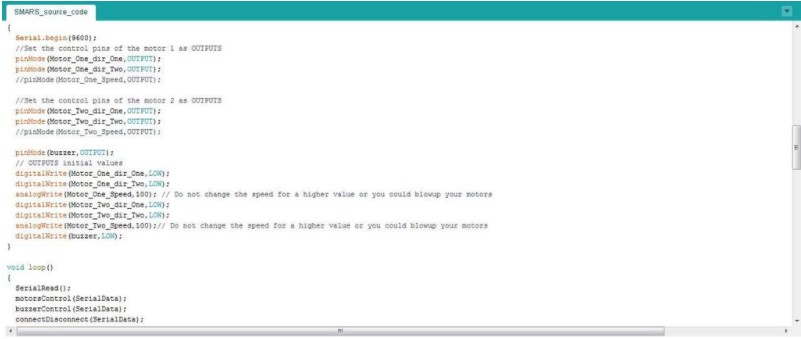
現在該移到軟件部分了,我已經制作了此Arduino代碼,您可以從下面的下載鏈接中獲得該代碼,它是如此基本的代碼,僅是從android應用程序接收的一些指令,以控制機器人的運動,現在我們需要做的就是將MCU放在Arduino UNO板上,然后將代碼上傳到微控制器,然后將其帶回到PCB上的插槽中。
責任編輯:pj
-
傳感器
+關注
關注
2548文章
50740瀏覽量
752141 -
機器人
+關注
關注
210文章
28231瀏覽量
206614 -
3D打印
+關注
關注
26文章
3544瀏覽量
108881
發布評論請先 登錄
相關推薦
物聯網、AR、3D打印、機器人未來將改變我們的生活?
基于Arduino的3D打印2輪機器人
3D打印軟體機器人助力3D打印技術發展
隨著3D打印服務的發展 3D打印手板用于機器人外殼打樣的優勢越來越明顯
研究人員受折紙結構的啟發推出3D打印軟機器人
越來越多的機器人開始使用3D打印技術
3D打印水下機器人,快速實現無人潛艇制造
用3D打印機和4足蜘蛛機器人制作伺服電機
帶有Arduino、樂高和3D打印部件的DIY雙足機器人






 工商網監
工商網監
評論