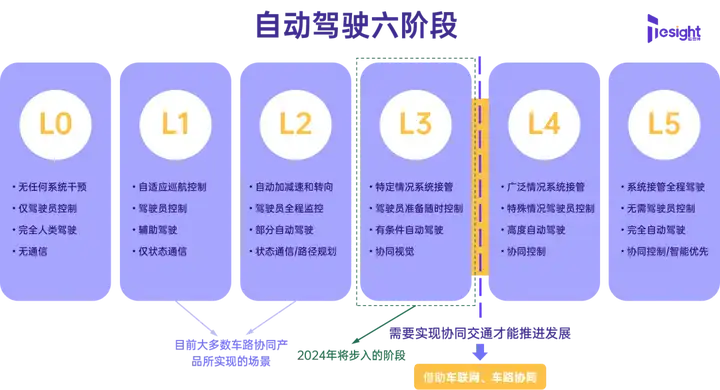
 L3/L4離不開的高精度地圖與定位什么時候才會商用?
L3/L4離不開的高精度地圖與定位什么時候才會商用?
L3/L4離不開高精度地圖與定位,這是公認的,無需贅言。而高精度地圖標準是需要國家層面來確定的。
為什么要組織國家層面的小組來制定高精度地圖的標準?因為高精度地圖牽涉國家安全,像高精度地圖中的核心數據——如道路曲率——是不能公開的。任何商用的電子地圖都加裝了偏轉插件,偏轉至少在2米以上,這就意味著無法L3/L4。解決辦法是國家層面控制這個插件,在做L3/L4時還原偏差,但又不能被第三方設備讀出。除了偏轉插件外,國家統一地圖標準,方便車企能夠在幾個圖商之間輕松切換,也便于和國際上的機構或圖商溝通交流。
在2018年4月份,在中國汽車工程學會和智能網聯汽車聯盟(運營實體為國汽智聯研究院)的支持下,成立了自動駕駛地圖和定位工作組。工作組由學會、協會和聯盟指導,清華大學和國汽智聯牽頭組織,目前成員單位已有86家企業,包括整車企業(一汽、北汽、長安、上汽、廣汽、奔馳、大眾、蔚來、福特、奧迪、東風商用車、東風汽車、通用、愛馳、PSA、FCA、紅旗),零部件企業(博世、大陸、電裝、鐳神、Velodyne、東軟、德賽、億咖通、經緯恒潤、博泰、均勝車聯),圖商(易圖通、百度)、大科技公司(中興、三星、諾基亞、華為)、初創公司(地平線、初速度、小馬智行、馭勢)。可以說涵蓋了中國汽車工業和智能駕駛產業的絕大部分骨干企業。工作組牽頭單位包括清華大學、國汽(北京)智能網聯汽車研究院、北京四維圖新科技股份、高德軟件、武漢中海庭數據技術,清華大學車輛與運載學院院長楊殿閣為組長。
目前進度最快的是《自動駕駛地圖采集要素模型與交換格式》標準,由易圖通科技(北京)有限公司牽頭研制。2020 年 1月8日正式啟動,2020年12 月 18 日完成《GB/T 1.1—2020 標準化》初稿,2021年1月18日到2月26日公開征求意見,3月23日正式通過審核成為中國第一個高精地圖領域的團體標準,3月底公開。起草單位:易圖通科技(北京)有限公司、清華大學、國汽(北京)智能網聯汽車研究院有限公司、北京百度網訊科技有限公司、北京四維圖新科技股份有限公司、武漢中海庭數據技術有限公司、廣東星輿科技有限公司、廈門大學(測繪行業人才大本營)、北京華為數字技術有限公司、北京初速度科技有限公司、中移智行網絡科技有限公司。這只是高精地圖標準的一部分,全部標準出爐估計要等到2023或2024年。這個團體標準基本就可以看作事實國家標準。
工作組還有一個重要任務就是對接ISO,歐洲的OADF和NDS,以及日本的DMP。
日本有一個類似中國自動駕駛地圖和定位工作組的公司,即DMP。在 2013 年,安倍內閣就啟動了 SIP(戰略性創新創造方案)項目以推動日本高新產業,振興經濟。其中自動駕駛技術(即 SIP-adus)占據了核心地位,日本政府還成立了 SIP自動駕駛推進委員會。2014年日本政府開始籌劃制作高精度地圖,2015年,該項目開展了自動駕駛的靜態數據調研,數據模型基于日本電子地圖協會(DRM)的基本款框架,由日本知名圖商 Pasco 主導調研。
日本在2016年6月成立了Dynamic Map Planning公司,該公司股東包括日本10大汽車公司,三菱電機和地圖開發商Zenrin。其中核心技術源自三菱電機的MMS (Mobile Mapping System)。
日本DMP公司將靜態信息模型分成動態、準動態、靜態、準靜態等若干部分,并且想把這個格式推向全世界。DMP公司是統一做基礎靜態的,有車廠和行業機構。而動態數據是各個做處理,然后提供給應用廠商。
2017 年 6 月日本政府機構 INCJ 加入并成為第一大股東,持股比例達 33.5%,三菱電機持股 14%,地圖開發商 Zenrin 公司持股 12%,地圖開發商 PASCO 持股12%,地圖發行商為 Aisan Technology 持股 10%,Increment 持股 8%,豐田地圖大師持股 8%,其余股份為 10大車廠,每家公司從5%的股份直接減少到0.5%。公司也更名為 Dynamic Map Platform。
DMP采用激光雷達為核心傳感器,以高精度激光雷達點云圖為原始數據,提供最高質量的3D高精度地圖,遠非傳統2D攝像頭地圖所能比擬。
2019年2月,DMP收購了背后由通用支持的美國地圖技術初創公司Ushr。Ushr是2007年成立的3D地理空間公司GeoDigital派生出來的公司。GeoDigital是一家測繪公司,專門研究公用事業、管道、鐵路、林業、基礎設施、移動LiDAR、大空間數據等基于位置的工作管理以及其他對企業至關重要的主題地圖繪制。
Ushr提供高精地圖軟件,以幫助自動駕駛車輛安全地導航地圖路線。Ushr被認為是第一家為量產車型提供高精地圖的公司。通用的2018年凱迪拉克CT6中的Super Cruise,就是使用Ushr的高精地圖繪制技術。該技術基于美國公路和較小道路上預先繪制的LiDAR分段路線。Ushr已經繪制了超過200000英里的道路,并且水平精度達15cm。該公司的平臺可以解釋地圖并將其傳輸給車輛控制系統和動力總成。這是凱迪拉克每次都能在輔助駕駛系統中力壓特斯拉成為第一名的主要原因。
2020年3月,豐田的TRI-AD和DMP已同意建立合作伙伴關系,從2020年4月開始應用兩家公司的技術來構建PoC。這個概念旨在證明DMP高效率的有效更新。使用TRI-AD的開放軟件AMP(Automated Mapping Platform)定義地圖,以便根據從車輛傳感器收集的圖像和其他數據來檢測和處理車道級道路要素的變化。
DMP施行4層LDM地圖,所謂LDM地圖,即本地動態地圖,起源自2007年博世的研究。目前LDM已經成為歐洲ETSI 標準中的重要組成ETSI TR 102 863 V1.1.1。我們常說的地圖是LDM地圖的最底層,V2X實際就是最上層。
底層的地圖升級是月級,最上層的V2X是秒級的。
中國在地圖工作組成立后,啟動了三個方面的課題研究:一個是自動駕駛地圖的標準體系,一個是自動駕駛地圖政策法規如偏轉問題,一個是中國自動駕駛地圖的技術路線圖。自動駕駛地圖工作組已經起草了6項標準。
第一個是自動駕駛高精度地圖特征定位數據技術規程。
第二個是自動駕駛地圖采集要素模型與交換格式。
第三個是自動駕駛地圖動調信息數據交換格式。
第四個是自動駕駛路側傳感器數據交換格式。
第五個是基于衛星地基增強的車輛定位技術要求。
第六個是關于自動駕駛路側感知定位技術條件的。
這幾個標準將列入中國汽車工程學會的標準。中國自動駕駛地圖標準除了國汽智聯外還有泰伯網參與,泰伯網組織的標準更傾向于比如測繪地圖的這種加工制作有關的領域,智能網聯汽車聯盟的自動駕駛地圖工作組,更多地側向于地圖的使用與自動駕駛功能的結合,包括地圖交換格式。
中國提出了7層LDM模型。增加了一個決策感知層,車道級路由規劃層和定位增強層,比日本的更適合自動駕駛。
第一層:道路級路網層。這一層地圖數據主要用于道路級路徑規劃,提供道路級的全局導航信息。這一層主要包含傳統的靜態電子地圖數據。
第二層:交通信息層。這一層地圖數據主要用于動態道路級路徑規劃。這一層地圖數據主要包括道路級動態交通數據,如交通堵塞和道路施工等事件,可用于避免擁堵的動態全局路徑規劃。
第三層:道路-車道連接層。這一層主要用于車道級路徑規劃,提供了道路級路網和車道級路網之間的拓撲連接。它能夠將道路級路網拓撲映射到車道級路網中。由于不包含每個車道的詳細信息,這一層數據體量相對較小,方便進行快速的候選車道級路徑搜索。
第四層:車道級路網層。這一層地圖數據是為車道級導航而設計的,提供了高精度的車道級幾何結構、車道級交通規則、道路標志等車道相關的信息。結合第三層和第四層可以得到綜合考慮道路坡度、曲率和交通規則的車道級最優路徑。
第五層:地圖特征信息層。這一層地圖數據用于輔助自動駕駛車輛的環境感知,可用于開發具有自主定位能力的車道級導航。這一層地圖存儲了高精度的特征數據,以便實現基于地圖匹配的定位或感知算法。
第六層:動態感知容器層。這一層地圖數據用于局部動態軌跡規劃。其存儲的數據包括網聯車輛或基礎設施共享的障礙物動態信息。同時這一層地圖也可以看做動態感知信息的容器,提供融合多車傳感器信息的標準化接口,如激光雷達、攝像頭等。基于這一層的信息,局部軌跡規劃可以考慮動態情況以便保證安全。
第七層:智能決策支持層。這一層是為自動駕駛決策過程設計的,它能夠提供駕駛決策知識數據庫。這一層存儲的數據來自于對駕駛員的駕駛決策行為的大量分析和學習。
對于道路級導航,只需使用第一層和第二層的地圖數據。對于使用差分衛星定位系統的車道級導航,需要在地圖中加入第三層和第四層。在GPS失效的情況下,第五層可以幫助車輛實現自主定位。對于多車協同駕駛場景,需要添加第六層來獲取聯網車輛共享的信息。對于高級別自動駕駛場景,第七層數據則提供了決策支持信息。
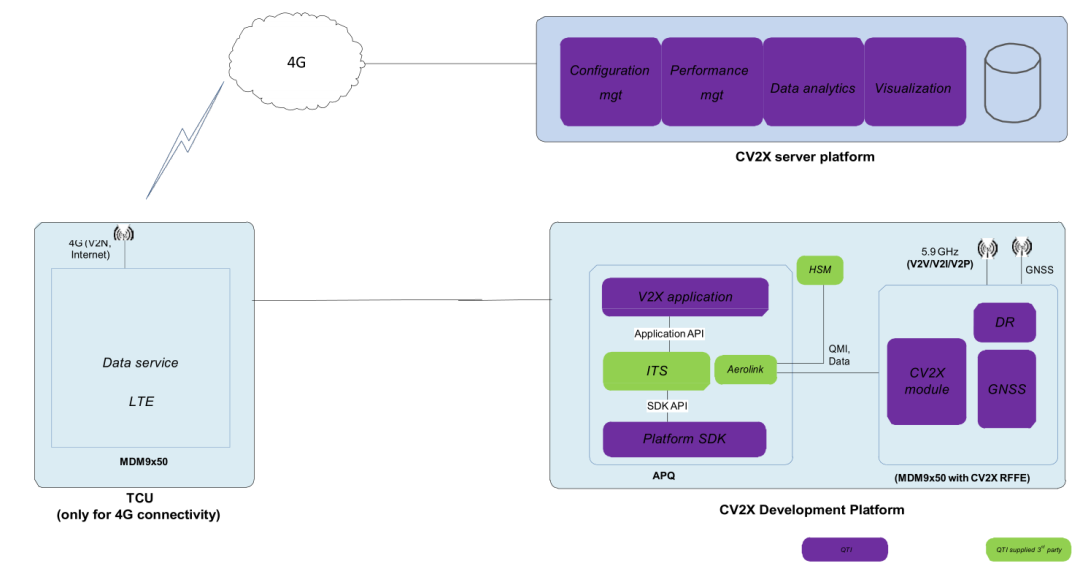
高通C-V2X平臺架構。圖片來源:高通
上層協議棧或者說ITS協議棧,歐美起步都很早,這主要是歐美從1999年就開始構思了利用無線通訊打造ITS系統的構思并付諸實施。歐洲電信標準協會即ETSI從2008年就開始著手制定ITS協議棧標準,目前已經基本制定完成。不過是基于DSRC的,但轉移到C-V2X的速度很快,畢竟只是通訊方式的不同,2020年1月,ETSI發布了ETSI EN 303 613接入層標準,將來還有ETSI TR 101 607標準。美國方面,比歐洲稍晚,大約在2010年開始制定以DSRC為通訊方式的標準,即SAE J3161。2019年則有針對C-V2X的J2945標準。
高通在第二代MDM9250開發平臺上提供基于SAE和ETSI標準的ITS協議棧。同時也支持第三方ITS協議棧。對SAE來說,關鍵的ITS信息包括BSM(Basic Safety Message,即SAE J2735)、Emergency Vehicle Alert (EVA) 、Signal Phase and Timing (SPaT)、Map Data(MAP)、Traveler Information Message (TIM)。對ETSI來說,關鍵信息包括Decentralized Environmental Notification Message (DENM)、Cooperative Awareness Message (CAM)、Signal Phase and Timing (SPaT)、LDM(本地動態地圖)。也就是說V2X的應用標準(數據格式與數據類型、通信方式)被ETSI收錄在內了。
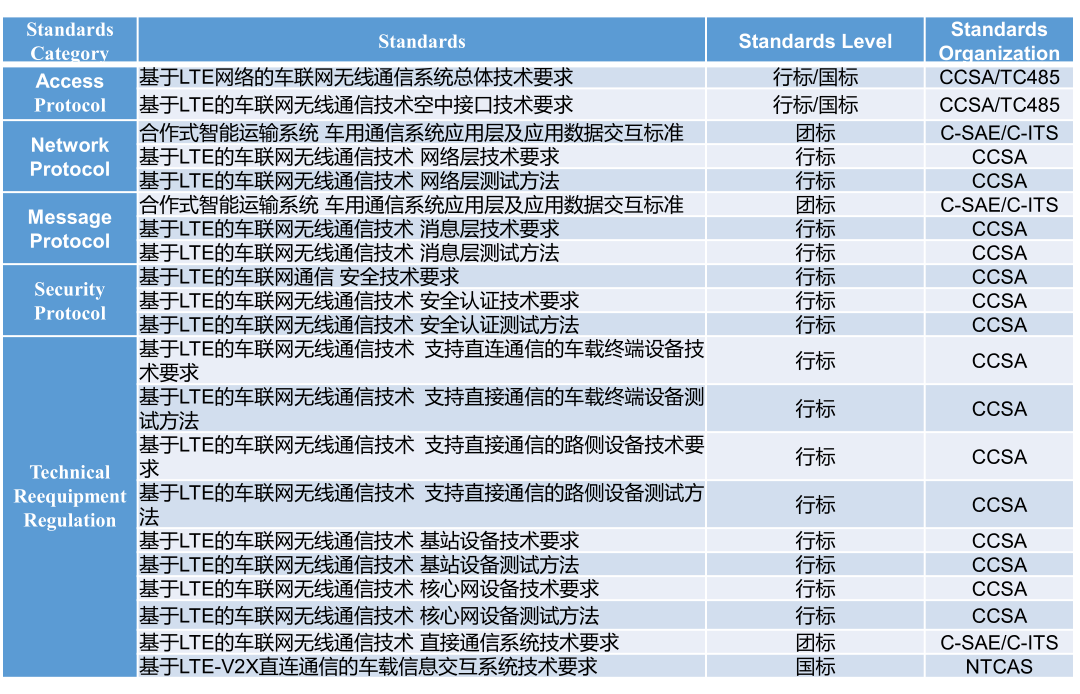
圖片來源:公開信息整理
中國目前已經基本完成的標準如上表,主導力量是中國通信標準化協會(CCSA),其余還有中國智能交通產業聯盟(C-ITS)、中國汽車工程協會(China-SAE)、國家汽車標準化技術委員會(NTCAS)、車載信息服務產業應用聯盟(TIAA)。
原文標題:L3/L4瓶頸——高精度地圖何時商用?
文章出處:【微信公眾號:佐思汽車研究】歡迎添加關注!文章轉載請注明出處。
責任編輯:haq
-
自動駕駛
+關注
關注
783文章
13694瀏覽量
166167
原文標題:L3/L4瓶頸——高精度地圖何時商用?
文章出處:【微信號:zuosiqiche,微信公眾號:佐思汽車研究】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
當春節駕車返鄉擁有了L3/L4級自動駕駛
l4級別自動駕駛的特點是什么
物聯網系統中高精度RTK定位方案的實現_高精度定位模塊

L4算法公司如何助力城市NOA加速落地?
華為智能汽車解決方案BU CEO靳玉志暢談L3級智能駕駛及規劃
什么是高精度定位平板?
駛向L3級自動駕駛:車路協同
L0與L4雙機采用SPI DMA循環模式通信過程中,L4接收數據錯位了的原因?
華為Net Master+高清網絡數字地圖,加速邁向L4自智網絡
NVIDIA和昊鉑宣布雙方將合作量產L4級自動駕駛汽車

康謀方案 | L2進階L3,數據采集如何助力自動駕駛
5G+北斗高精度融合定位,主打一個 “快準穩”

自動駕駛產業鏈爆發前夜?多家車企宣布已獲得L3級自動駕駛路測牌照

虹科方案丨L2進階L3,數據采集如何助力自動駕駛





 工商網監
工商網監
評論