 科學家發現可以解釋機器人握住濕物體時發生摩擦的新物理定律
科學家發現可以解釋機器人握住濕物體時發生摩擦的新物理定律
一直以來,接觸潮濕的表面,對機器人來說是巨大的挑戰。
最近,科學家發現了一種新的物理定律,可以解釋機器人握住濕物體時發生的摩擦。這種新發現的摩擦機理,可能會促進誕生更適合外科手術的機器人設計。
“我們的工作為在遠程手術和制造業等領域創建更可靠、功能更強的觸覺和機器人設備打開了大門,” 在和團隊發現新的物理規律之后,北卡羅萊納州立大學化學與生物分子工程學助理教授 Lilian Hsiao 表示。
北卡羅萊納州立大學化學與生物分子工程學的博士畢業生彭云鵠,是發現上述解釋機器人摩擦的新物理定律的主要研究人員之一,也是 Lilian Hsiao 課題組的學生,他說該研究將推動眾多機器人技術的發展。
近日,其以第一作者身份在《自然?材料》上發表了相關論文,論文題為《機器人和人手指的彈性動力摩擦》(Elastohydrodynamic friction of robotic and human fingers on soft micropatterned substrates)。
摩擦是物理的中心主題之一,摩擦無處不在也非常必要,它能幫助我們握住東西而不會掉落。
盡管機器人設備已經廣泛使用,但研發人員很難考慮機器人在抓取物體時產生的摩擦,特別是在潮濕的環境中。不同于人類可以憑直覺去握住濕的物體,以防止物體滑出我們的手。對于機器人而言,這一直是非常困難的挑戰。
大多數摩擦滑動的相互作用都涉及到粗糙的表面。這種摩擦過程在物理學中具有基本意義,這早已體現在幾個世紀的研究中。它們在當今不同的行業領域也具有重要的實際重要性。
但是,流體耗散、固體變形和局部流動導向效應之間,有著復雜的相互作用,因此人類尚未完全了解圖案化表面的潤滑滑動。
作為一種特殊摩擦,彈性流體動力潤滑摩擦 (elastohydrodynamic lubrication,EHL) 一直難以被研究,它是兩個固體表面之間的摩擦類型,固體表面之間會被一層流體隔開。
這種摩擦的常見場景有,當你用指尖互相摩擦時會產生一種摩擦,但是你的皮膚上存在著一層天然油脂的薄層流體。這種摩擦,還常見于沾滿洗手液泡沫的雙手、以及用手觸摸水果店水果去了解成熟度。
人類對于這種摩擦,相對比較可控。這是因為皮膚中的數千上萬的觸覺機械感受器,可以向神經系統提供必要的反饋,從而能夠快速調節握力。
但是,在開發控制機器人抓握能力的材料時,很難處理彈性流體動力潤滑摩擦。
想象一下,當截肢患者正在使用機械臂,或者醫生正在進行顯微外科手術,對于這種摩擦往往很難控制。
舉例來說,機器人手臂、以及具備抓握能力的觸覺材料,在制備過程中都需考慮到摩擦。但是,由于此前人類對 EHL 的理解有限,研究人員在研發擁有可調摩擦特性的材料、以及使用相關技術時,會受到一定限制,而這會影響觸碰屏等器件制造、遠程手術等多個領域的應用。
受人類抓取能力的啟發,機器人系統的目的是設計具有機械屬性、傳感器和反饋原理的抓握器,以提高抓握器的穩定性。新興的觸覺技術,可通過電粘附或超聲波振動,來調節摩擦來模擬自然表面的感覺。然而,捕捉真實表面的感覺仍然具有挑戰性,因為只要 EHL 仍然存在,這些挑戰依然會在。
也就是說,要想制備出能控制 EHL 摩擦的材料,研究人員需要一個可兼容各種樣式、各種材料和各種運行條件的框架,而這正是本次研究的初衷。
發現新定律,助力機器人制備
期間,彭云鵠發現一種新定律,該定律可控制圖案化表面上的彈性流體動力潤滑的峰值摩擦值。在平滑摩擦對中,并不存在峰值摩擦值。因為,這種不同源于在有紋理的表面,流體產生了不同的流動方式。
本次研究中,運用彭云鵠發現的新定律,只要能對物體表面進行構圖,即可控制彈性流體動力潤滑摩擦,并可將其應用于許多不同的軟系統。
通過改變軟摩擦對的幾何形狀、流體特性和彈性,并使用流變儀測量潤滑摩擦,即可生成一種框架模型。這款模型能預測生物啟發的機器人指尖和人類手指的 EHL 摩擦。
由于其具備廣泛適用性,因此可給機械手和抓手的設計提供信息,此外還開辟出一種將摩擦編碼轉為觸覺信號的新方法。
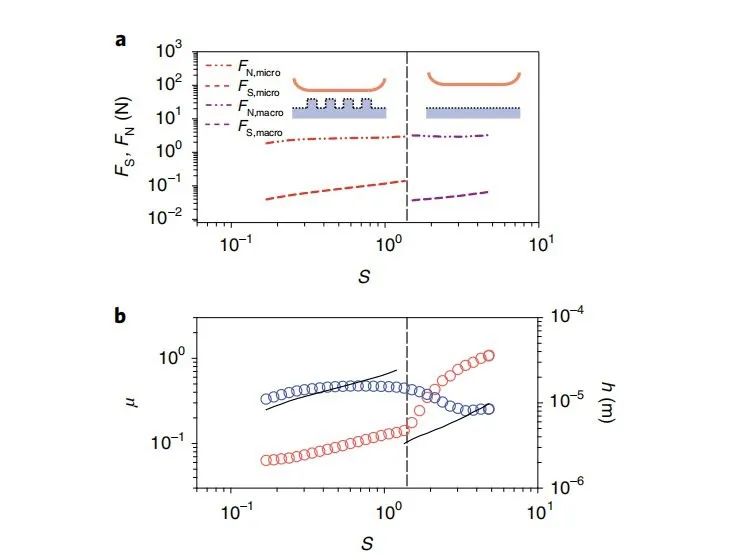
圖 | 在具有圖紋的軟物質表面的正壓力,摩擦,以及潤滑膜厚度在不同滑動速度下的變化(來源:受訪者)
只要能對物體的表面進行構圖,該定律就可以用來解釋 EHL 摩擦,并且可以將其應用到許多不同的軟物質系統中。在這種情況下,表面圖案可以是任何東西,如從手指尖上略微凸起的表面、到機器人工具表面上的凹槽。
彭云鵠觀察到,長度在 10μm 至 100μm 之間的圖案,在 EHL 摩擦中滑動到另一個表面時,會在 EHL 摩擦中引入唯一一個局部峰值。
在彭云鵠的系統中,h 被定義為靜止模式的頂部和滑動表面的底部之間的距離,然后他使用雷諾茲方程預測了 FS~U/h 和 FN~U/h2。
其中,摩擦空氣的體積摩擦系數 μ,由 μ=FS/FN 給出,并且 h 的細小變化也會產生 μ 的實質性變化。雖然可以用專門的雙折射和干涉測量來直接測量 h,但這樣測量的 h 的分辨率在光學上限制在~3μm 以下。總結來說,這些數值方法提供了一個令人滿意的 μ 模型。
其中,他利用四個方程式解釋了 EHL 所需的物理力,并分別在三個系統中證明了該規律:人類手指;受生物啟發的機器人指尖;以及一個稱為摩擦流變儀的工具,該工具可用于測量摩擦力。
從表面上來看,這三種體系從受力面積,表面圖案等幾方面來看截然不同。尤其是人類以及機器手指兩個體系無法像摩擦流變儀一樣控制受力。然而,這三個系統的的具體證明過程都有著如下的過程:
為了解這種效果、并為 EHL 摩擦的設計提供指導框架,彭云鵠使用雷諾潤滑理論,對剪切力 FS、和法向力 FN 相對于滑動速度 U 和流體膜厚 h 的變化做以建模。
隨后他發現,半分析理論、統計分析表明、線性回歸和所有實驗數據點之間,都具備極好的一致性。
綜上所述,針對三個不同系統的適用性,該設計原理可開辟出很多機會,其中包括通過改變軟表面圖案,來改變潤滑摩擦。
這一發現的意義在于,一旦我們對觸覺拓寬了認知,機器人就能和潮濕表面進行物理接觸,就可誕生出能在潮濕和骯臟的條件下進行抓握的機器人。
該研究顯示,三角弓的伸縮行為可擴展到人類和機器人的手指,并闡明了在圖案表面的抓取和觸覺探索中影響摩擦的因素。
這意味著,本次研究中的框架可研究 EHL 在減小彈性和圖案幾何形狀之間保持平衡的規律,以此解決阻礙 EHL 理論廣泛應用的基本挑戰,從而推動機器人技術的廣泛發展。
在遠程外科領域,借助該規律可制備出觸覺更強的機器人,從而讓外科醫生通過遠程控制機器人設備、來執行外科手術。
在更廣泛的領域如食品設計、化妝品設計、景觀演變中,該規律都可扮演重要作用。
談及未來的落地計劃,彭云鵠告訴 DeepTech:“本研究所展示的物理規律確實能夠幫助設計更靈敏的機器人手,然而該規律的應用不僅于此,還能夠用在日用消費品領域,比如食品和化妝品配方的設計。”
人類的手指其實是含有圖紋的軟物質,與其同理的是我們的舌尖,人類舌頭上的味蕾也可以被看做是含有圖紋的軟物質。
當我們涂抹化妝品以及咀嚼食物時,不同配方的化妝品和食物會給消費者不同的感受,究其原因就是因為這些過程中產生了不同的 EHL 摩擦。
但是,人類手指由于富含神經,可以感受非常細微的摩擦力的區別,對于舌尖來說,味蕾在咀嚼過程中會產生彎曲從而反饋出不同的摩擦力。
然而人類手指以及味蕾的圖紋,有著比較固定的特征長度,依據本次論文中圖 4 的結論,我們應該感受到相同的摩擦,那這是否意味著圖 4 產生的結論就不適用于此了呢?
并不然。在本次研究中,彭云鵠等人僅僅取了 EHL 摩擦的峰值進行分析。可以預見的是,由于流體粘度以及其他特性的不同,在不同的摩擦速度下運用相同的理論推導方式會產生新的類似于文章中圖 4 的模型曲線,從而幫助我們進一步預測不同流體體系下的 EHL 摩擦。
在此情況下,食品以及化妝品領域可以應用本研究中的模型設計出來對應的配方,從而給予消費者特定的摩擦反饋以及特定的感受。
事實上,軟物質摩擦學(Soft tribology)在各個領域有著非常廣泛的應用前景,除了本文介紹的幾個領域之外,該學科還在新型人工關節制造等領域有著相當大的潛力,可以預見的是摩擦學整體在將來會繼續蓬勃發展。
原文標題:物理新定律誕生,由中國科學家發現,可幫助機械臂抓住潮濕物體,有望用于機器人遠程手術 | 專訪
文章出處:【微信公眾號:DeepTech深科技】歡迎添加關注!文章轉載請注明出處。
責任編輯:haq
-
機器人
+關注
關注
210文章
28212瀏覽量
206560
原文標題:物理新定律誕生,由中國科學家發現,可幫助機械臂抓住潮濕物體,有望用于機器人遠程手術 | 專訪
文章出處:【微信號:deeptechchina,微信公眾號:deeptechchina】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
2024年諾貝爾物理學獎為何要頒給機器學習?
【書籍評測活動NO.51】具身智能機器人系統 | 了解AI的下一個浪潮!
機器人仿真的類型和優勢

《AI for Science:人工智能驅動科學創新》第二章AI for Science的技術支撐學習心得
英偉達預測機器人領域或迎“GPT-3時刻”
Jim Fan展望:機器人領域即將迎來GPT-3式突破
受人眼啟發!科學家開發出新型改良相機
中國科學家發現新型高溫超導體
工業機器人視覺技術的應用分為哪幾種?
天津大學科學家突破人類大腦器官成功驅動機器人
Al大模型機器人
前OpenAI首席科學家創辦新的AI公司
黃仁勛:新一輪科技浪潮將是物理AI機器人的崛起
DeepMind引領機器人技術革新:從“機器人憲法”到高效決策

科學家研發仿生小鼠機器人,可用于災后救援和探測檢修等領域






 工商網監
工商網監
評論