 基于GPS時鐘實現數字同步網工程的應用設計
基于GPS時鐘實現數字同步網工程的應用設計
數字同步網是數字通信網正常運行的基礎,也是保障各種業務網運行質量的重要手段。他與電信管理網、信令網一起并列為電信網的3大支撐網,在電信網中具有舉足輕重的地位。
1 數字同步網的基本原理和結構
對于任何通信設備,都需要時鐘為其提供工作頻率,所以時鐘性能是影響設備性能的一個重要方面。時鐘常被稱為設備的心臟。時鐘工作時的性能主要由2個方面決定:自身性能和外同步信號的質量。而外同步信號的質量就是由數字同步網來保證的。當設備組成系統和網絡后,數字同步網必須為系統和網絡提供精確的定時,以保障其正常運行。網內各節點時鐘的精度影響一個數字通信網工作是否正常。
數字同步網是一個由節點時鐘設備和定時鏈路組成的實體網,他通過網同步技術為各種業務網的所有網元分配定時信號(頻率或者時間信號),以實現各種業務網的同步。網同步是指為了保證數字通信網正常工作,分配定時信號到網內所有節點,要求網內所有節點的時鐘頻率和相位嚴格控制在一定的容差范圍內。
數字同步網的結構主要取決于同步網的規模、網絡中的定時分配方式和時鐘的同步方法,而這些又取決于業務網的規模、結構和對同步的要求。同步網一般可分為準同步方式和同步方式2大類。準同步方式常用于國際間鏈路,各節點獨立設置基準時鐘(如銫原子鐘),其時鐘基準一般都優于或滿足G.811規定的基準鐘,頻率準確度保持在10-11極窄的頻率容差之內。各國國內的數字通信網則普遍采用同步方式,節點時鐘之間一般采用主從同步方法:將網內節點時鐘分級,各級時鐘具有不同的頻率準確度和穩定度。設置高穩定度和高準確度時鐘(如銫原子鐘或GPS時鐘,其頻率準確度應≤±1×10-11/d)為基準主時鐘(最高級時鐘或一級時鐘),網內其他節點時鐘則稱為從時鐘,用從時鐘鎖相環技術與基準主時鐘(或上一級時鐘)頻率同步,使全網時鐘工作在同一頻率上。
我國的數字通信網規模龐大,分布范圍廣,所以數字同步網一般要接受幾個基準主時鐘共同控制。如果采取定時鏈路來傳輸定時信號,那么隨著數字傳輸距離的增長,傳輸損傷逐漸增大、可靠性逐漸降低。而利用裝配在基準鐘上的GPS接收機跟蹤UTC(世界協調時),來實現對基準鐘的不斷調整,使之與UTC保持一致的長期頻率準確度,從而達到各個基準鐘同步運行和全網高度同步的目的是切實可行的,也是方便實用的。并且,在數字同步網中采用GPS配置基準鐘,實現方法簡單,同步時間精度高,提高了全網性能,成本卻相對低廉,并且便于維護管理,所以GPS時鐘在基準鐘中得到廣泛使用。
2 GPS授時的基本原理
GPS是NAVSTAR/GPS(Navigation SatelliteTiming and Ranging/Global Positioning System)的簡稱,是由美國國防部研制的導航衛星測距與授時、定位和導航系統,由21顆工作衛星和3顆在軌備用衛星組成,這24顆衛星等間隔分布在6個互成60°的軌道面上,這樣的衛星配置基本上保證了地球任何位置均能同時觀測到至少4顆GPS衛星。GPS由3部分構成:
①GPS衛星(空間部分);
②地面支撐系統(地面監控部分);
③GPS接收機(用戶部分)。
GPS向全球范圍內提供定時和定位的功能,全球任何地點的GPS用戶通過低成本的GPS接收機接受衛星發出的信號,獲取準確的空間位置信息、同步時標及標準時間。GPS要實時完成定位和授時功能,需要4個參數:經度、緯度、高度和用戶時鐘與GPS主鐘標準時間的時刻偏差,所以需要接受4顆衛星的位置。若用戶已知自己的確切位置,那么接受1顆衛星的數據也可以完成定時。
若設(x,y,z)為接收機的位置,(xn,yn,zn)為已知衛星的位置,則列解下列方程就可以得到x,y,z和標準時間T:
(X-X1)2+(y-y1)2+(z-z1)2=C2(T+ΔT-T1-t1)
(x-x2)2+(y-y2)2+(z-z2)2=C2(T+ΔT-T2-t2)
(x-x3)2+(y-y3)2+(z-z3)2=C2(T+ΔT-T3-t3)
(x-x4)2+(Y-y4)2+(z-z4)2=C2(T+ΔT-T4-t4)
其中:ΔT為用戶時鐘與GPS主鐘標準時間的時差;
Tn為衛星n所發射信號的發射時間;
tn為衛星n上的原子鐘與GPS主鐘標準時間的時差。
由于GPS采用被動定位原理,所以星載高穩定度的頻率標準是精密定位和授時的關鍵。工作衛星上一般采用的是銫原子鐘作為頻標,其頻率穩定度達到(1~2)X10-13/d。GPS衛星上的衛星鐘通過和地面的GPS主鐘標準時間進行比對,這樣就可以使衛星鐘與GPS主鐘標準時間之間保持精確同步。GPS衛星發射的幾種不同頻率的信號,都是來自衛星上同一個基準頻率。GPS接收機對GPS衛星發射的信號進行處理,經過一套嚴密的誤差校正,使輸出的信號達到很高的長期穩定性。定時精度能夠達到300ns以內。在精確定位服務PPS(Precise Position Service)下,GPS提供的時間信號與UTC之差小于100ns。若采用差分GPS技術,則與UTC之差能達到幾個納秒。
3 GPS時鐘的實現方法
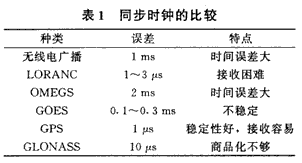
常規時鐘頻率產生方法可以是晶體、銣鐘等。但晶體會老化,易受外界環境變化影響,長期的精度漂移影響;原子鐘長期使用后也會產生偏差,需要定時校準。而GPS系統由于其工作特性的需要,定期對自身時鐘系統進行修正,所以其自身時鐘系統長期穩定,具有對外界物理因素變化不敏感特性。晶體或銣鐘以GPS為長期參考,可以獲得低成本、高性能的基準時鐘。現有同步時鐘的比較如表1所示。
在網絡正常工作狀態下,GPS時鐘具有與GPS主鐘相同的頻率準確度;由于在某些特殊情況下GPS時鐘信號會暫時消失,所以基于GPS的時鐘模塊一般需要另一個外部時鐘作為后備輸入,預留有外接時鐘的時基和頻標信號(如GLONASS、中國雙星、銣原子鐘等)接口。另外,GPS時鐘其頻率準確度還具有自身保持性能。
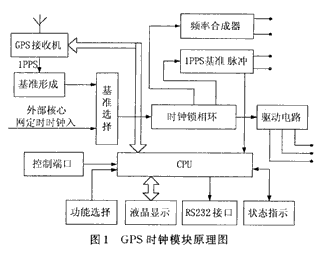
GPS時鐘頻率模塊提供所需的各種時頻的信號,并輸出定位時間信息、GPS接收機是否工作正常、輸出的時間信號是否有效、時鐘和頻率處理模塊激活狀態、異常告警等等。圖1是GPS時鐘模塊的原理圖
4 現狀與展望
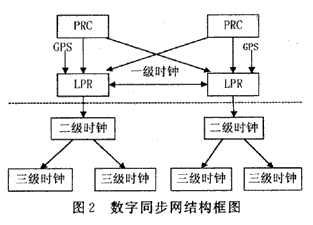
根據《中華人民共和國通信行業標準數字同步網工程設計規范》,數字同步網按分布式多個基準時鐘的組網建設,以基準鐘的同步范圍劃分同步區,每個同步區內采用主從同步方法。區域基準鐘(LPR)的主用基準為GPS,備用基準來自全網基準鐘(PRC)。LPR平時以接收GPS信號為主用信號,以接收PRC信號為備用。GPS不可用時,LPR同步于PRC。
我國現有數字同步網的網絡結構如圖2所示。
由于GPS全球衛星定位系統歸美國政府所有,受控于美國國防部,對世界各地的用戶未有任何政府承諾,而且用戶只支付了GPS接收機的費用,并未支付GPS系統的使用費用,因此這種方法自主性差,也帶來一些不穩定因素,例如故意降低GPS精度;關閉GPS在某個地區的發送信號;增加隨機擾碼;周圍環境對GPS無線信號的干擾等。
可以充分利用但不能完全依靠,因此還需要有由銫鐘組成的基準鐘PRC,以他作為全網同步的根本保證。還有GPS在某些特殊情況下信號暫時消失,或者GPS不正常工作,這些可以通過監控GPS數據來發覺,這些情況如果不做處理帶來的結果是基準鐘將降質為二級時鐘,所以此時要控制區域基準鐘(LPR)改為同步于全網基準鐘(PRC),同步質量就可以保證。
目前有GPS、CLONASS、北斗雙星導航衛星系統CNSS、歐洲GALILEO等多元化定位資源環境,可以打破了獨家壟斷,促使資源更加開放。
可以利用市場上現在有的GPS/GLONASS雙模接收機、GPS/北斗雙模終端進行時鐘同步,則可在很大程度上保證同步質量,還可以提高同步精度。例如GPS/GLONASS雙模接收機輸出時間信號1PPS的準確度如表2所示。

由此可見,使用GLONASS授時精度不會降低;在GPS/GLONASS模式下,其授時精度還可以獲得進一步改善。
責任編輯:gt
-
gps
+關注
關注
22文章
2884瀏覽量
166044 -
接收機
+關注
關注
8文章
1180瀏覽量
53408 -
衛星
+關注
關注
18文章
1702瀏覽量
66904
發布評論請先 登錄
相關推薦

配網行波故障定位裝置 系統構成 廣域時鐘同步 工程安裝
中國唯一受邀出席2024 IEEE ISPCS企業!賽思ePRTC系統成5G時頻同步網最強Buff!

GPS、北斗衛星同步時鐘天線安裝注意事項?

兆越打造 | GPS/北斗高精度時間同步網絡方案

同步時鐘:北斗/GPS衛星、電信基站、NTP以太網校時方式的區別

如何解決同步時鐘系統中的常見問題和故障?

GPS衛星同步時鐘的工作原理及應用場景介紹

同步時鐘:北斗/GPS衛星、電信基站、NTP以太網等多種校時方式的區別






 工商網監
工商網監
評論