 基于P89C668單片機和SJA1000控制器實現節點接口電路的設計
基于P89C668單片機和SJA1000控制器實現節點接口電路的設計
CAN(Controller Area Network)總線,又稱控制器局域網,屬于現場總線的范疇,是一種有效支持分布式控制或實時控制的串行通信網絡。與其它幾種現場總線相比,CAN 總線是最容易實現、價格也最為低廉。由于其性能好,可靠性高、設計靈活,現已廣泛應用于工業現場控制、智能大廈、小區防范、交通工具、醫療儀器、環境監控等眾多領域。
CAN總線規范已被國際標準化組織(ISO)定為國際標準,CAN協議也是建立在國際標準化組織的開放系統互連參考模型(OSI)基礎上的.CAN總線主要工作在數據鏈路層和物理層,用戶可在其基礎上開發適合系統實際需要的應用層通信協議,由于CAN總線的可靠性高,使應用層通信協議得以大大簡化。目前市場上有多種不同型號的CAN控制器,它們實現CAN協議部分電路的結構和功能大多相同,只是與單片機接口部分的結構和方式有一些差異。
為了提高硬件電路的效率,簡化電路設計上的復雜性,保證電路的電氣兼容性,本文采用PHILIPS公司生產的P89C668單片機和CAN控制器SJA1000設計了CAN接口節點電路,并介紹了相關的軟件設計。
1 CAN總線節點接口硬件電路設計
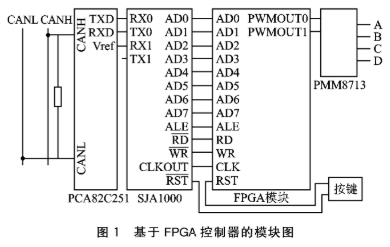
CAN節點接口硬件電路原理如圖1所示。采用PHILIPS公司生產的P89C668單片機、CAN控制器SJA1000和CAN總線收發器PCA82C250設計接口電路來實現CAN總線通信。

圖1 CAN總線接點接口硬件電路原理
P89C668單片機內帶64kB Flash存儲器,該存儲器既可并行編程,在系統編程ISP中也可串行編程,在實際的成型產品中可通過ISP升級用戶程序。 在Boot ROM程序中,可通過一個默認的串行下載器(UART)對Flash存儲器作ISP編程,而在Flash代碼區中并不需要調用下載器的代碼,用戶程序可通過調用在Boot ROM中的標準子程序對Flash存儲器擦除和再編程(即IAP)。
P89C688在6個時鐘周期內執行一條指令,一個OTP位讓用戶可選擇傳統的12個時鐘周期.P89C688用先進CMOS工藝制造,是80C51單片機家族的衍生品,其指令集和80C51相同。該單片機有四個8位I/O口,三個16位定時器/事件計數器,多中斷源,四個優先級,可嵌套中斷結構,一個增強型UART和片內振蕩器以及時序電路.P89C668新增特性使其成為一個功能強大的單片機,可為某些應用提供PWM、高速的I/O和加/減計數。
SJA1000 是PHILIPS 公司生產的獨立CAN 通信控制器,它既支持CAN2.0A,又支持CAN2.0B,與PCA82C200 CAN 控制器兼容(BasicCAN),并可替代PCA82C200;增加了一種新的工作模式PeliCAN,使其支持具有很多新特性的CAN2.0B 協議;集成了CAN 協議的物理層和數據鏈路層功能,可完成對通信數據的成幀處理;具有多主結構、總線訪問優先權、硬件濾波等特點。
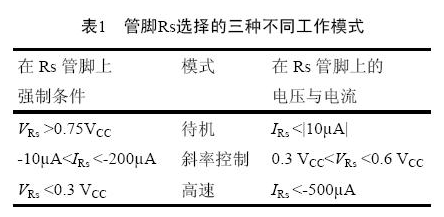
PC82C250為CAN總線收發器,是CAN 控制器和物理總線的接口,提供對總線的驅動發送能力、對CAN控制器的差動發送能力和對CAN控制器的差動接收能力。它具有很強的抗瞬間干擾和保護總線的能力,以及三種不同的工作方式即高速、斜率控制和待機,如表1所示。總線上的某一個節點掉電不會影響總線,在40米內應用的速度可達1M baud,最多可掛110個節點。
從圖1 可看出,該硬件電路主要由單片機P89C668、CAN 獨立控制器SJA1000 和CAN 收發器PCA82C250 組成。
單片機P89C668 負責對SJA1000 進行初始化,通過控制SJA1000實現數據的發送與接收等通信任務。
SJA1000 的AD0“AD7連接到P89C668 的P0口;
CS連接到P89C668的P1.1,P1.1 為0 時選中SJA1000,可控制SJA1000;
SJA1000 的RD/E、WR、ALE/AS 分別連接到P89C668 的RD(P3.7)、WR(P3.6)、P1.0;
SJA1000的(INT)連接到P89C668 的P3.2(INT0),這樣,P89C668 可以通過中斷方式訪問SJA1000;
SJA1000的模式選擇引腳MODE 接高電平時選擇Intel 模式;
為了保證時鐘同步,SJA1000 的CLKOUT 引腳使能,向P89C668 提供時鐘源。
2 CAN 總線節點接口軟件設計
實現CAN 總線通信,要對CAN 總線節點接口設計相應的總線通信程序;在總線通信之前,必須進行SJA1000 控制器初始化。在上電或復位后,單片機通過運行其自身復位程序初始化SJA1000.CAN總線通信程序大致由SJA1000 初始化、發送和接收三部分組成。以下分別對他們進行簡單的描述。
2.1 SJA1000 初始化
在上電后,CAN 控制器的RST 腳獲得一個復位脈沖,使之進入復位模式。在開始對SJA1000 各個配置寄存器進行設定之前,主控制器通過讀復位/請求標識來檢測SJA1000是否進入復位模式。為了避免微控制器的上電復位時間和SJA1000 的復位時間的偏差,微控制器要等待SJA1000 完成上電復位后才能對SJA1000 配置寄存器進行配置,存有配置信息的寄存器只能在復位模式下才可進行寫入.SJA1000 初始化程序在復位模式下,主控制器要配置下面的寄存器:
(1)模式寄存器(僅在PeliCAN 模式下選擇應用操作模式)
接收過濾模式
自檢測模式
偵聽模式
(2)時鐘分頻寄存器
使用BasicCAN 或PeliCAN 模式
CLKOUT 引腳是否可以使用
CAN 輸入比較器是否被跳過
TX1 輸出是否專門用于接收中斷輸出
(3)總線定時寄存器
定義總線的位速率
定義位周期內的采樣點位采樣點
定義一個位周期的采樣數量
(4)接收代碼和接收掩碼寄存器
定義要接收消息的接收代碼
定義與接收代碼相關位進行比較的接收掩碼
(5)輸出控制寄存器
定義CAN 總線輸出引腳TX0 和TX1 的配置
在將這些配置信息配置到SJA1000配置寄存器后,通過消除復位模式,請求使SJA1000進入操作模式。一定要確保復位標志真的被刪除,并且在沒有進行CAN 總線通信前進入操作模式,這可以通過讀該標志來實現。 當硬件復位處于掛起狀態,即CAN 控制器的RST 引腳為低電平時,復位模式/請求標志不能被清除。
下面是SJA1000 的初始化程序。
CAN_INI: MOV DPTR, #MOD; 模式寄存器
MOV A, #01H
MOVX @DPTR, A
NOP
MOVX A, @DPTR
ANL A, #01H
JZ CAN_INI; 等待SJA1000 進入復位模式
MOV DPTR, #BTR0; 總線定時0
MOV A, #BandRate0
MOV DPTR, #BTR1; 總線定時1
MOV A, # BandRate1
MOV DPTR, #OCR; 輸出控制寄存器
MOV A, #1AH
MOVX @DPTR, A
MOV DPTR, #CDR; 時鐘分頻器
MOV A, #0C0H
MOV DPTR, #ACR0; 接收代碼寄存器ACR0
MOV A, #ModuleAddress; 設置為模塊的地址
MOVX @DPTR, A
INC DPTR
MOV A, #0FFH
MOV @DPTR, A
INC DPTR
MOV A, #0FFH
MOVX @DPTR, A
INC DPTR
MOV A, #0FFH
MOVX @DPTR, A
MOV DPTR, #AMF0; 接收掩碼寄存器AMF0
MOV A, #0FFH; 接收代碼設置為
0X0FFFFFFFF
MOVX @DPTR, A
INC DPTR
MOV A, #0FFH
MOVX @DPTR, A
INC DPTR
MOV A, #0FFH
MOVX @DPTR, A
INC DPTR
MOV A, #0FFH
MOVX @DPTR, A
MOV DPTR, #IER ; 中斷使能寄存器IER
MOV A, #09H; 允許接收中斷和數據溢出中斷
MOV DPTR, #CMR; 命令寄存器
MOV A, #04H; 釋放接收緩沖器
MOVX @DPTR, A
LOOP: MOV DPTR, #MOD
MOV A, #08H; 設置SJA1000 工作模式為普通模式,單濾波接收
MOVX @DPTR, A
MOV DPTR, #MOD
MOV A, @DPTR
ANL A, #01H
JNZ LOOP; 等待復位標識被清除
RET
2.2 CAN 總線發送程序
對SJA1000控制器進行初始化建立CAN總線通信后,就可以通過CAN總線發送和接收報文。發送程序負責節點的報文發送。發送報文時,用戶只需將需要發送的數據按一定的格式組合成一幀的報文,并送入SJA1000發送緩存區中,然后啟動SJA1000發送即可。發送程序分發送數據幀和遠程幀兩種。通過設置RTR以決定是發送數據幀還是遠程幀。
SJA1000的報文主要有中斷控制和查詢兩種發送方式。主動發送報文建議采用查詢方式,一次發送不成功,可再次發送,這樣發送程序的處理比較簡單,可采用查詢SJA1000控制部分狀態標識符的方法。下面給出以查詢方式發送報文的發送程序。
CAN_SEND: MOV DPTR, #SR; 狀態寄存器SR
MOVX A, @DPTR;
ANL A, #04H
JZ CAN_SEND; 等待發送寄存器釋放
MOV R7, #0AH
MOV R0, #TXB_Data; 待發送數據的首地址
MOV DPTR, #TXB_Addr; 發送寄存器的基地址
LOOP1: MOV A, @R0; 將數據寫入發送寄存器
MOVX @DPTR, A
INC DPTR
INC R0
DJNZ R7, LOOP1
MOV DPTR, #CMR; 命令寄存器
MO A, #01H; 發送請求命令
MOVX @DPTR, A
RET
2.3 CAN總線接收程序
SJA1000 根據規則自動接收消息,接收到的消息放入接收緩沖器,同時接收緩沖器狀態標志位RBS 置為1,接收程序根據RBS 值來決定接收報文與否.SJA1000 報文的接收也有兩種方式:中斷和查詢。對通信的實時性要求不高時,可采用查詢方式,否則采用中斷方式。以下給出中斷接收方式程序。
CAN_INT: CLR EA; 關所有中斷
MOV DPTR, #IER; 中斷寄存器IER 使能
MOVX A, @DPTR
MOV R6, A; 保存SJA1000 中斷允
MOV A, #00H ; 重設SJA1000 中斷允許模式為不允許任何中斷
MOVX @DPTR, A
LCALL RECEIVE; 接收信息
JZ ReceivOk; 接收到的信息正確則跳轉,否則進行錯誤處理。. 。.; 錯誤處理
ReceivOk: MOV DPTR, #IER
MOV A, R6; 恢復SJA1000 中斷允許模式
MOVX @DPTR, A
SETB EA; 開放中斷
RETI
RECEIVE: CLR A
MOV DPTR, #SR; 狀態寄存器SR
JZ ERROR; 不是正常的消息接收中斷則跳轉
LOOP2: MOV DPTR, #RXB_Addr; 接收寄存器的基地址
MOV R1, #RXB_Data; 存放所接收數據的首地址
MOV R7, #0AH
LOOP3: MOVX A, @DPTR; 接收數據
MOV @R1, A; 保存數據
INC DPTR
INC R1
DJNZ R7, LOOP3
MOV DPTR, #CMR; 命令寄存器
MOV A, #0X04; 釋放接收緩沖器
MOVX @DPTR, A
MOV DPTR, #SR
MOVX A, @DPTR
CJNE A, #01H, LOOP2; 等待接收隊列為空
MOVD PTR, #IR; 中斷寄存器IR
MOVX A, @DPTR; 清空SJA1000 的接收中斷標識位
CLR A; 返回值ACC=0,表示接收消息正確
LJMP END_RECEIVE
ERROR: 。. 。.; 接收消息錯誤處理
MOVA, #01H; 返回值ACC=1,表示接收消息不正確
NED_RECEIVE: RET
3 結語
以上介紹了P89C668單片機及其與CAN控制器SJA1000之間的接口方法,并給出了SJA1000在PeliCAN模式下的SJA1000初始化程序、發送程序和接收程序。可在此基礎上實現更復雜的CAN總線通信處理,如報警處理、錯誤處理等。
責任編輯:gt
-
單片機
+關注
關注
6032文章
44525瀏覽量
633264 -
控制器
+關注
關注
112文章
16214瀏覽量
177481 -
接口
+關注
關注
33文章
8526瀏覽量
150863
發布評論請先 登錄
相關推薦
基于SJA1000的完整CAN節點設計
CAN控制器SJA1000片選基址怎么確定?
基于多P89C668單片機的組合邏輯電路自動測試診斷系統設計
SJA1000 在CAN 總線系統節點的應用
SJA1000控制器在多電機綜合保護器中的應用
SHARC DSP與SJA1000的CAN總線接口設計
DSP與CAN控制器SJA1000的總線接口的差別
基于FPGA的VHDL語言設計控制器SJA1000的IP軟核設計






 工商網監
工商網監
評論