 新型人工肌肉:模仿舌頭與象鼻,伸縮彎扭全都行
新型人工肌肉:模仿舌頭與象鼻,伸縮彎扭全都行
上海交通大學機器人所研究團隊模仿人舌、象鼻等生物組織中的“靜水壓骨骼肌”,設計制造了一類氣動人工肌肉,可以實現伸長、彎曲、螺旋、縮短、扭轉等多種運動模態以及它們的組合,并提出了這種人工肌肉的快速設計和制造方法。
相關成果發表于《國家科學評論》(National Science Review, NSR),上海交通大學博士后鄒江為第一作者,上海交通大學朱向陽教授和谷國迎教授為論文的通訊作者,論文合作者還包括美國麻省理工學院方絢萊教授。
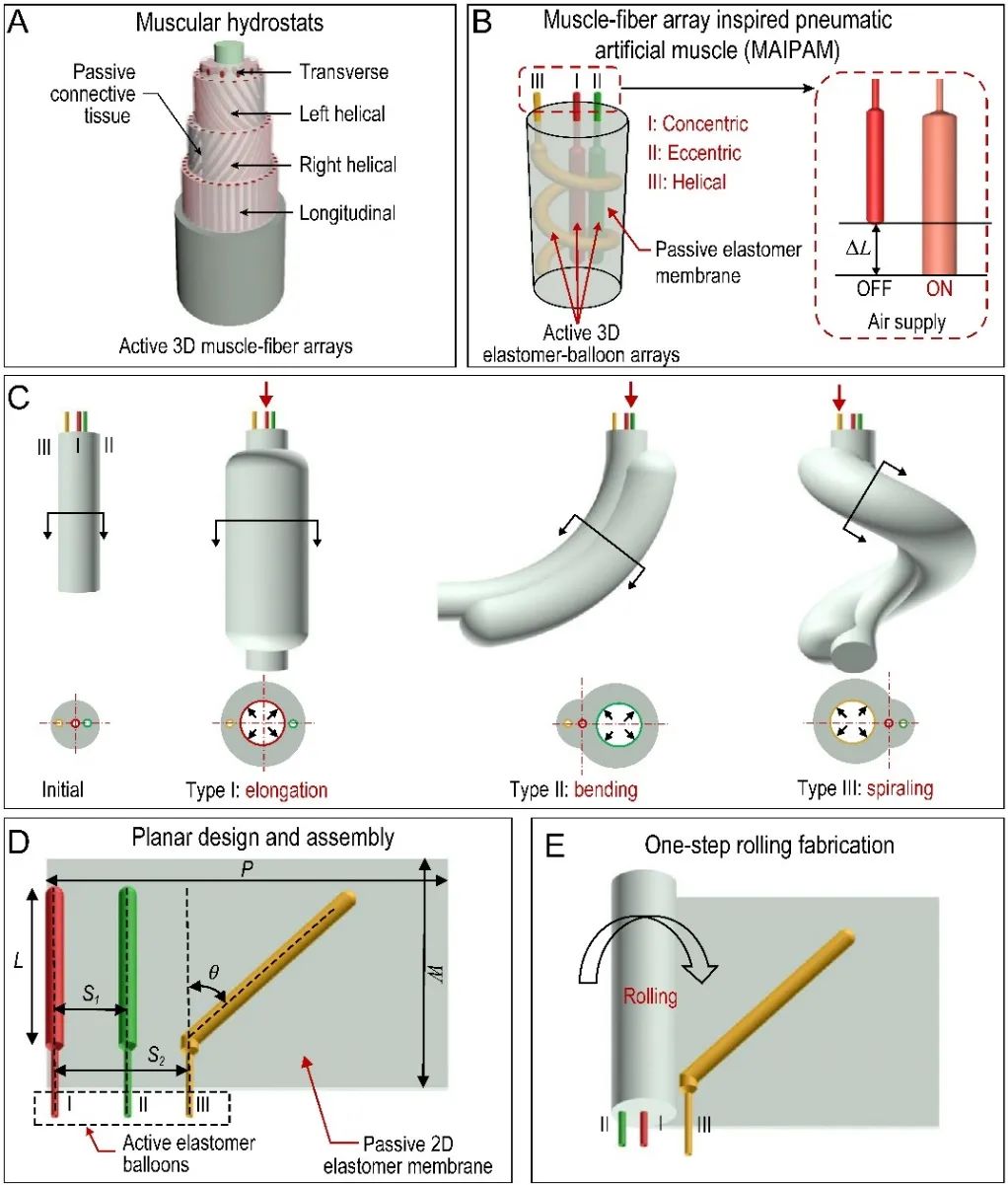
多模態氣動人工肌肉的工作原理及設計、制造方法
人工肌肉是軟體機器人的關鍵核心技術。然而,由于缺乏簡單有效的設計與制造方法,現有的人工肌肉通常只能產生單一的運動模態,多模態人工肌肉的自動化設計與快速制造一直是該領域研究的難點。
在象鼻、人舌、章魚觸手等生物組織中,存在“靜水壓骨骼肌”,它可以選擇性驅動不同的主動肌纖維陣列,從而產生不同的驅動模態,包括伸長、縮短、彎曲和扭轉等,賦予了生物組織無與倫比的靈巧性。
以此為靈感,研究團隊提出了一類仿肌纖維陣列的多模態氣動人工肌肉。該人工肌肉主要由主動彈性體氣球陣列和被動彈性體薄膜組成,通過選擇性驅動不同方向的主動彈性體氣球,可以產生伸長、彎曲、螺旋、縮短、扭轉等不同的運動模態以及它們的組合,比如并聯的伸長-彎曲-螺旋運動、并聯的10個彎曲運動、串聯的伸長-彎曲-螺旋運動等。
研究者提出了一種平面設計和卷曲成型相結合的方法,實現了人工肌肉三維結構的快速制造。這種制造方法還賦予了人工肌肉很強的可擴展性,比如,可集成不可拉伸的限制層以實現縮短或扭轉運動,也可組裝柔性電極以實現自傳感功能。
實驗結果表明,該多模態氣動人工肌肉在軟體機器人中具有廣泛的應用前景,如環境探測、抓取或操作物體、管道爬行等。
編輯:jq
-
機器人
+關注
關注
210文章
28209瀏覽量
206542 -
螺旋
+關注
關注
0文章
32瀏覽量
17396
原文標題:新型人工肌肉:模仿舌頭與象鼻,伸縮彎扭全都行 | NSR
文章出處:【微信號:zhishexueshuquan,微信公眾號:知社學術圈】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
RFTOP WR28 300mm可扭軟波導實測對比

彎式sma頭連錫不良問題處理方法

彎式N頭常見的故障

bnc彎公頭有哪些獨特優勢

彎式bnc連接器出現松動的原因

bnc母頭彎式的優勢和特點

bnc母頭彎式的接插問題
bnc彎公頭有哪些優勢和特點
彎式bnc連接器的作用和安裝方法
電動推桿伸縮桿故障e02怎么解決
電動推桿伸縮桿怎么控制
Meta Quest Pro更新支持舌頭追蹤,豐富VR社交體驗
WT2003H4-16S語音芯片:扭蛋機新潮音樂,娛樂升級無限






 工商網監
工商網監
評論