") 基于WSN節(jié)點(diǎn)實(shí)現(xiàn)智能自治測(cè)控網(wǎng)絡(luò)系統(tǒng)的設(shè)計(jì)
基于WSN節(jié)點(diǎn)實(shí)現(xiàn)智能自治測(cè)控網(wǎng)絡(luò)系統(tǒng)的設(shè)計(jì)
作者:付耀先;何洪路;劉海濤
無(wú)線傳感器網(wǎng)絡(luò)(WSN)是由大量無(wú)處不在的、具有通信與計(jì)算能力的微小傳感器節(jié)點(diǎn)密集布設(shè)在無(wú)人值守的監(jiān)控區(qū)域而構(gòu)成的能夠根據(jù)環(huán)境自主完成指定任務(wù)的智能自治測(cè)控網(wǎng)絡(luò)系統(tǒng),可廣泛應(yīng)用于航天、航空、國(guó)防、電力、能源、環(huán)境、醫(yī)療、災(zāi)難預(yù)警、空間探索等領(lǐng)域。2003年,MIT技術(shù)*論在預(yù)測(cè)未來(lái)技術(shù)發(fā)展的報(bào)告中,將其列為改變世界的十大新技術(shù)之一。一般情況下,WSN節(jié)點(diǎn)采用隨機(jī)散布的方式,且存在著功耗受限、通信能力受限、計(jì)算能力受限、存儲(chǔ)能力受限等問(wèn)題,因此對(duì)設(shè)計(jì)提出了較高要求。
WSN的應(yīng)用環(huán)境多樣,存在所接前端探測(cè)器不相同、布設(shè)環(huán)境不一樣的可能。特別在隨機(jī)布設(shè)時(shí),各個(gè)節(jié)點(diǎn)所處的位置及相隔的距離無(wú)法預(yù)先確定。探測(cè)器的不同及對(duì)數(shù)據(jù)處理方式不同,產(chǎn)生的數(shù)據(jù)量可能不同。同時(shí),布設(shè)的環(huán)境可能為城區(qū)、郊區(qū)、山地等不同環(huán)境。要在多變的傳輸需求和環(huán)境下實(shí)現(xiàn)良好的通信,傳感網(wǎng)節(jié)點(diǎn)必須具有良好的環(huán)境適應(yīng)性,即可以通過(guò)調(diào)整自身的通信參數(shù)滿足不同傳輸要求。因此需要WSN節(jié)點(diǎn)具有相當(dāng)?shù)撵`活性。
目前在WSN節(jié)點(diǎn)的設(shè)計(jì)上,大多將信息處理模塊與通信模塊隔離開(kāi)來(lái),分別采用不同的硬件進(jìn)行處理,通信模塊基本采用現(xiàn)有成熟產(chǎn)品。這樣設(shè)計(jì)的系統(tǒng),缺乏整體考慮,難以在體積功耗上進(jìn)行最小化的設(shè)計(jì),且由于通信模塊固定,不能同時(shí)適應(yīng)具有不同傳輸數(shù)據(jù)量、不同傳輸速率和不同誤碼率要求的系統(tǒng)。而這些條件是WSN中是應(yīng)滿足的常見(jiàn)要求。
本文給出基于整體性能優(yōu)化、具有相當(dāng)靈活性、能夠滿足自適應(yīng)通信要求的WSN節(jié)點(diǎn)實(shí)現(xiàn)方案,并就能耗與通信的適應(yīng)性進(jìn)行分析。
1 工作環(huán)境與通信體制
在考慮傳感器節(jié)點(diǎn)的通信方式前,需要首先考慮傳感器的布設(shè)環(huán)境。傳感器節(jié)點(diǎn)間一般通過(guò)無(wú)線方式進(jìn)行信息交互;傳感器節(jié)點(diǎn)的布設(shè)環(huán)境多為近地環(huán)境,直達(dá)的視距信號(hào)較少,多為衍射或折射后到達(dá)的信號(hào),存在較多的多徑干擾;傳感網(wǎng)的布設(shè)具有不定性,節(jié)點(diǎn)間距離不一定相等;傳感器節(jié)點(diǎn)間的信息交互量較少。同時(shí),由于傳感器節(jié)點(diǎn)大規(guī)模散布,需要減少對(duì)其他系統(tǒng)的干擾并提高自身抗干擾能力,并具備信息安全保密功能。
由于直達(dá)的視距信號(hào)較少,需要采用能有效利用多徑方式實(shí)現(xiàn)通信。擴(kuò)頻通信體制能很好地適應(yīng)多徑傳輸環(huán)境,且可通過(guò)擴(kuò)頻增益的更改調(diào)整自身通信靈敏度,在距離近時(shí)能提高傳輸速率減小信息碰撞,在距離遠(yuǎn)時(shí)能通過(guò)有效提高靈敏度的方式來(lái)實(shí)現(xiàn)和其他節(jié)點(diǎn)的通信及自適應(yīng)通信,同時(shí)考慮到信息保密安全的問(wèn)題,采用直接序列擴(kuò)頻通信體制作為WSN的主要通信方式。由于信息交互量較小,且系統(tǒng)無(wú)中心節(jié)點(diǎn),所以適合采用異步通信體制。
由于WSN的應(yīng)用環(huán)境不定,電磁環(huán)境中可能存在固定頻點(diǎn)干擾,因此設(shè)計(jì)的系統(tǒng)要求能在多個(gè)頻點(diǎn)上跳轉(zhuǎn)工作,對(duì)存在干擾的頻點(diǎn)可實(shí)現(xiàn)干擾避免。
系統(tǒng)采用擴(kuò)頻通信方式時(shí),發(fā)射信號(hào)為:
S(t)=N(t)D1(T)cos(2πft)+N(t)D2(T)sin(2πft)(1)
其中:N(t)為偽隨機(jī)碼,D1(T)和D2(T)為待傳送數(shù)據(jù),cos(2πft)和sin(2πft)為調(diào)制載波信號(hào)。t為時(shí)間單元,T為碼元持續(xù)時(shí)間,f為載波頻率。
為滿足自適應(yīng)通信需求,在系統(tǒng)設(shè)計(jì)中,要求T和f可調(diào)。
當(dāng)T=Mt時(shí),擴(kuò)頻增益為A=10log10M;當(dāng)T=t時(shí),擴(kuò)頻增益為0,此時(shí)數(shù)據(jù)傳輸速率最高;當(dāng)T=13t時(shí),擴(kuò)頻增益為11.1394dB,當(dāng)T=1023t時(shí),擴(kuò)頻增益為30.1030dB。
設(shè)在T=t時(shí)系統(tǒng)靈敏度為SNR=-SdB,則當(dāng)T=Mt時(shí),系統(tǒng)靈敏度為SNR=-(S+A)dB。
f的變化帶來(lái)傳播損耗的變化,頻率越低,傳播損耗越小,繞射性越好。當(dāng)需要進(jìn)行遠(yuǎn)距離傳輸或和接收端無(wú)法建立聯(lián)系時(shí),可以將發(fā)射頻率降到最小。
2 系統(tǒng)設(shè)計(jì)
在進(jìn)行系統(tǒng)設(shè)計(jì)時(shí)充分考慮到系統(tǒng)的硬件體積功耗,實(shí)現(xiàn)硬件功能軟件化及復(fù)用,同時(shí)盡量降低設(shè)計(jì)復(fù)雜度。本設(shè)計(jì)中的WSN節(jié)點(diǎn)可實(shí)現(xiàn)傳感探測(cè)信息處理、協(xié)議控制、處理后的信息發(fā)送及接收等功能,其硬件平臺(tái)組成如圖1所示。該硬件平臺(tái)采用DSP作為主要的信息處理平臺(tái)及系統(tǒng)運(yùn)作控制器,DSP軟件存儲(chǔ)于FLASH中(包括協(xié)議控制模塊、信息處理模塊和通信處理模塊等),通過(guò)DSP啟動(dòng)相應(yīng)的硬件電路及調(diào)用不同的軟件模塊來(lái)實(shí)現(xiàn)系統(tǒng)功能。
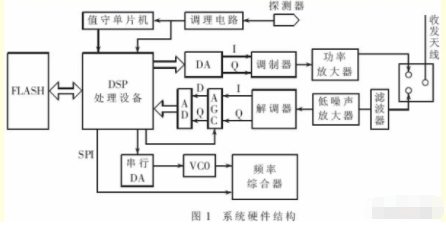
協(xié)議控制模塊為主運(yùn)行模塊,根據(jù)約定的流程實(shí)現(xiàn)硬件電路的調(diào)用控制、參數(shù)更改及信息處理和通信處理軟件模塊的協(xié)調(diào)調(diào)用、參數(shù)更改,使軟硬件配合實(shí)現(xiàn)整個(gè)系統(tǒng)功能。
信息處理模塊和探測(cè)器、調(diào)理電路及值守單片機(jī)組成信息處理單元,完成傳感信息的探測(cè)、模式識(shí)別分析、融合處理及目標(biāo)報(bào)警等功能。探測(cè)器將探測(cè)到的模擬信息通過(guò)調(diào)理電路的信號(hào)放大,模數(shù)轉(zhuǎn)換后送至單片機(jī)進(jìn)行預(yù)處理;單片機(jī)進(jìn)行初步的處理分析,發(fā)現(xiàn)信號(hào)后給DSP中斷;DSP收到中斷后啟動(dòng)相應(yīng)的處理程序進(jìn)行進(jìn)一步的信號(hào)處理分析,對(duì)目標(biāo)的有無(wú)及目標(biāo)種類進(jìn)行確切分析。分析確認(rèn)目標(biāo)后給協(xié)議控制模塊中斷信號(hào),以提示報(bào)警。
通信處理模塊和外圍的射頻電路及相應(yīng)的輔佐器件組成通信單元,包括發(fā)射和接收兩大部分。系統(tǒng)采用零中頻方案,將頻率較高的處理放在模擬器件中完成,可以降低AD、DA采樣頻率,減少數(shù)字運(yùn)算工作量,達(dá)到節(jié)省功耗的目的。在射頻模塊中采用一次上變頻和一次下變頻的處理,可以減少系統(tǒng)復(fù)雜度,節(jié)省硬件體積。在收發(fā)切換上采用電子開(kāi)關(guān)進(jìn)行時(shí)分雙工,收時(shí)不發(fā),發(fā)時(shí)不收,可以有效減小系統(tǒng)體積,且和協(xié)議配合實(shí)現(xiàn)通信功能時(shí)可節(jié)省功耗。射頻的頻率合成器可對(duì)收發(fā)頻率進(jìn)行設(shè)置,實(shí)現(xiàn)多個(gè)頻點(diǎn)的信息收發(fā)。需要注意的是,由于該系統(tǒng)前端濾波處理抑制度不夠,故可能存在較多的大信號(hào)干擾,這對(duì)AD器件的轉(zhuǎn)換精度提出了較高的要求,同時(shí)為達(dá)到較好的效果,需要在DSP內(nèi)進(jìn)行數(shù)字濾波。DSP可對(duì)AGC和VCO進(jìn)行控制,實(shí)現(xiàn)對(duì)信號(hào)幅度及本地載波頻率相位的調(diào)整。
系統(tǒng)將整個(gè)時(shí)間段劃分為目標(biāo)探測(cè)時(shí)間段、發(fā)射時(shí)間段和接收時(shí)間段。各個(gè)節(jié)點(diǎn)處于發(fā)射和接收態(tài)的時(shí)間不同,具體時(shí)間根據(jù)協(xié)議約定結(jié)果進(jìn)行設(shè)置。通常,處于信息中轉(zhuǎn)的節(jié)點(diǎn)在其他節(jié)點(diǎn)處于發(fā)射態(tài)時(shí)需處于接收態(tài),且大多數(shù)時(shí)間處于接收態(tài),同時(shí)可以根據(jù)系統(tǒng)布設(shè)的密度和需要進(jìn)行接收及發(fā)射的時(shí)間設(shè)置。
各個(gè)節(jié)點(diǎn)收發(fā)時(shí)間的交錯(cuò)可減少系統(tǒng)沖突的概率。設(shè)傳感網(wǎng)中8個(gè)節(jié)點(diǎn)均與Sink節(jié)點(diǎn)通信,則Sink節(jié)點(diǎn)和其他節(jié)點(diǎn)的狀態(tài)設(shè)置如圖2所示。
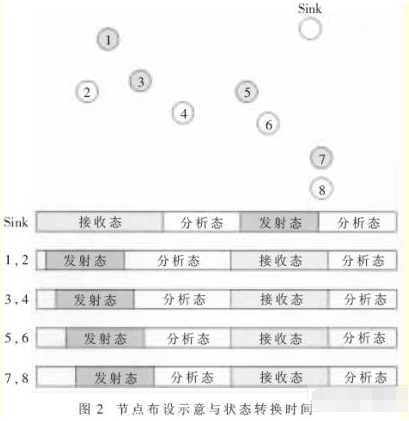
當(dāng)Sink節(jié)點(diǎn)處于發(fā)射態(tài)時(shí),所有節(jié)點(diǎn)均處于接收態(tài);反之,當(dāng)所有節(jié)點(diǎn)處于發(fā)射態(tài)時(shí),Sink節(jié)點(diǎn)處于接收態(tài)。根據(jù)系統(tǒng)設(shè)定,將節(jié)點(diǎn)劃分為不同的簇,不同簇間節(jié)點(diǎn)的發(fā)射時(shí)間可以互相交錯(cuò),其提前或滯后時(shí)間為一個(gè)常見(jiàn)信息幀的發(fā)送時(shí)間。這樣在一簇節(jié)點(diǎn)僅有一個(gè)信息上傳時(shí),基本可以實(shí)現(xiàn)時(shí)分,從而減少信息沖突。
系統(tǒng)工作狀態(tài)如圖3所示。
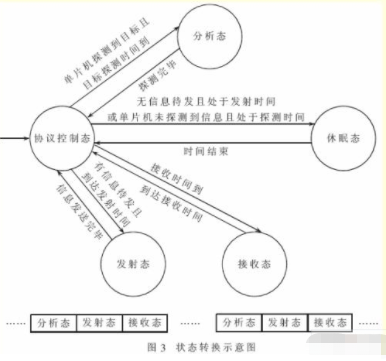
系統(tǒng)開(kāi)機(jī)后,首先進(jìn)入?yún)f(xié)議控制態(tài),協(xié)議控制態(tài)根據(jù)約定流程進(jìn)行狀態(tài)轉(zhuǎn)換,并將單片機(jī)探測(cè)目標(biāo)中斷優(yōu)先級(jí)設(shè)置到最高,一旦該中斷觸發(fā),即通過(guò)硬件DMA將數(shù)據(jù)信號(hào)送入RAM中存儲(chǔ),等待處理。當(dāng)發(fā)射時(shí)間片到時(shí),協(xié)議控制模塊檢測(cè)是否有信號(hào)待發(fā)送。如無(wú),則進(jìn)入休眠態(tài);如有,則進(jìn)入發(fā)射狀態(tài),發(fā)射完畢后返回協(xié)議控制態(tài);如仍處于發(fā)射時(shí)間段,協(xié)議控制模塊控制轉(zhuǎn)入休眠態(tài)。當(dāng)接收時(shí)間片到,系統(tǒng)進(jìn)入接收態(tài),隨時(shí)進(jìn)行信號(hào)的接收,直至接收時(shí)間片結(jié)束為止。當(dāng)進(jìn)入目標(biāo)探測(cè)時(shí)間片時(shí),對(duì)存儲(chǔ)的數(shù)據(jù)進(jìn)行處理,分析是否存在信號(hào),并將分析結(jié)果上報(bào)給協(xié)議控制模塊。
主要的自適應(yīng)通信模塊處于DSP中,其軟件功能實(shí)現(xiàn)如圖4所示。
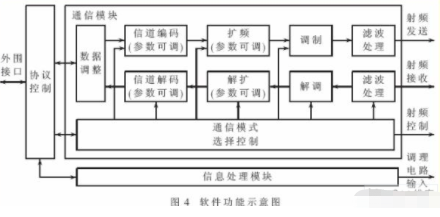
通信模塊采用直接序列擴(kuò)頻方式,可通過(guò)擴(kuò)頻增益的更改來(lái)獲得不同的靈敏度,以滿足不同數(shù)據(jù)速率及傳輸距離的要求。擴(kuò)頻碼為0~1 023位的Gold碼,擴(kuò)頻增益存在30dB的差別,更高的擴(kuò)頻增益意味著更高的靈敏度和更遠(yuǎn)的傳輸距離。
信道編解碼模塊參數(shù)可調(diào)整,根據(jù)系統(tǒng)接收效果設(shè)置不同的參數(shù)。當(dāng)對(duì)信息誤碼率要求不高、而對(duì)信息的傳輸速率要求較高時(shí),可視傳輸信道情況適當(dāng)降低信道編解碼的糾錯(cuò)能力,反之則可提高。
調(diào)制方式采用QPSK/OQPSK。發(fā)射濾波處理為對(duì)信號(hào)進(jìn)行成型濾波,接收濾波處理為相應(yīng)的匹配濾波。
3 主芯片器件性能及能量管理
選用Blackfin533作為主要的數(shù)字處理器件。Blackfin系列DSP是美國(guó)模擬器件公司(簡(jiǎn)稱ADI)基于微信號(hào)體系結(jié)構(gòu)的DSP,是專為滿足嵌入式音頻、視頻和通信應(yīng)用的計(jì)算要求和功耗約束條件而設(shè)計(jì)的16到32 位嵌入式處理器。它將一個(gè)32 位RISC型指令集和雙16位乘法累加(MAC)信號(hào)處理功能與通用型微控制器所具有的易用性組合在一起,能夠同時(shí)滿足信號(hào)處理和控制處理應(yīng)用的需求,從而極大地簡(jiǎn)化了硬件和軟件設(shè)計(jì)。其處理速度快(ADSP-BF533處理速度可達(dá)750MHz)、功耗低的特點(diǎn)更適合WSN應(yīng)用。
同時(shí),Blackfin 處理器基于一種選通時(shí)鐘內(nèi)核設(shè)計(jì),可按照逐條指令選擇切斷功能單元的電源。通過(guò)內(nèi)部的動(dòng)態(tài)電源管理模塊對(duì)工作頻率和電壓進(jìn)行獨(dú)立控制,以滿足正在執(zhí)行的算法性能要求。這些轉(zhuǎn)換可以在一個(gè) RTOS(實(shí)時(shí)操作系統(tǒng))或用戶固定的控制之下連續(xù)出現(xiàn)。大多數(shù) Blackfin 處理器都提供了片上內(nèi)核穩(wěn)壓電路,并可在低至0.8V的電壓條件下工作,因而特別適合于需要低功耗的便攜式應(yīng)用。
降低工作頻率后,能量節(jié)省因子可表示為:

fCCLKRED為降頻后的時(shí)鐘頻率,fCCLKNOM為正常狀態(tài)下的時(shí)鐘頻率,VDDINTRED為降頻工作后的電壓,VDDINTNOM為正常狀態(tài)下的電壓,TRED為降頻后工作時(shí)間,TNOM為正常狀態(tài)下的工作時(shí)間。
Blackfin處理器支持的轉(zhuǎn)換狀態(tài)如表1所示。
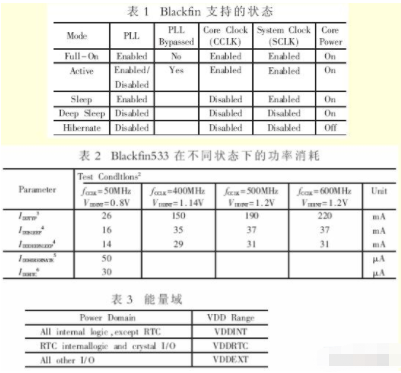
Blackfin533在各種不同狀態(tài)下的功耗如表2所示。其中,IDDTYP為典型應(yīng)用情況下的電流,IDDSLEEP為休眠狀態(tài)下的情況,IDDDEEPSLEEP為深度休眠狀態(tài)下的情況,IDDHIBERNATE為關(guān)掉電源管理后的電流(VDDEXT=3.65V,VDDINT=0V),IDDRTC為VDDRTC=3.3V時(shí)測(cè)得的電流。
電壓標(biāo)志含義如表3所示。
4 系統(tǒng)性能分析
下面從自適應(yīng)通信和傳輸距離的關(guān)系及能耗兩個(gè)方面來(lái)分析系統(tǒng)的性能。
(1)系統(tǒng)路徑損耗與傳輸距離/傳輸頻率的關(guān)系
系統(tǒng)仿真參數(shù)設(shè)置為:
最大擴(kuò)頻增益:30dB
射頻頻率變化范圍:200MHz“2GHz
發(fā)射機(jī)天線高度:5m
接收機(jī)天線高度:2m
最高速率時(shí)系統(tǒng)靈敏度:80dB
具有代表意義的傳播為自由空間傳播和近地傳播。首先觀察在自由空間傳播中的情況。
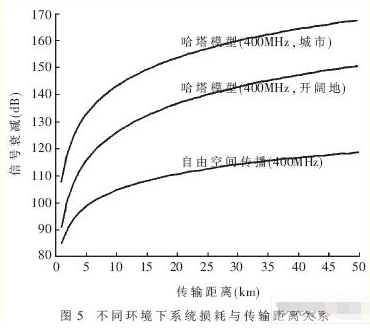
設(shè)原有系統(tǒng)的靈敏度為-80dB,傳輸頻率為400MHz,在增加30dB的擴(kuò)頻增益后,在自由空間中傳輸距離可增加近20km。且頻率越高,這種增長(zhǎng)的趨勢(shì)越明顯。
以Hata模型為例說(shuō)明在其他環(huán)境下的對(duì)比情況。Hata模型是根據(jù)Okumura曲線圖所作的經(jīng)驗(yàn)公式,頻率范圍為150MHz”1 500MHz,以市區(qū)傳播模型損耗為標(biāo)準(zhǔn),其他地區(qū)在此基礎(chǔ)上進(jìn)行修正,適用于半徑超過(guò)1km的大區(qū)域移動(dòng)系統(tǒng)。
設(shè)系統(tǒng)工作頻點(diǎn)為400MHz,則在不同環(huán)境下,系統(tǒng)的損耗與傳輸距離關(guān)系如圖5所示。在城區(qū)環(huán)境下,系統(tǒng)的損耗較大,傳輸距離較近,30dB的增益僅能提升3km的距離。但如果增大發(fā)射功率,仍可獲得較好的效果。
(2)系統(tǒng)能耗分析
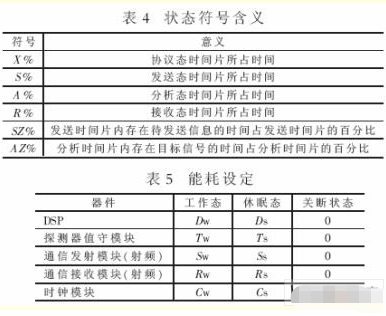
各個(gè)狀態(tài)符號(hào)的含義如表4。各部分能耗設(shè)定如表5所示。
協(xié)議控制態(tài)下系統(tǒng)功耗為:Dw+Cw+Tw
發(fā)射態(tài)下系統(tǒng)功耗為:Dw+Sw+Cw+Tw
接收態(tài)下系統(tǒng)功耗為:Dw+Rw+Cw+Tw
分析態(tài)下系統(tǒng)功耗為:Dw+Cw+Tw
休眠態(tài)下系統(tǒng)功耗為:Ds+Cw+Tw
系統(tǒng)總功耗為:
P=(Dw)X%+(Dw+Sw)(S%SZ%))+(Dw+Rw)R%+(Dw)A%AZ%+(Ds)[S%(1-SZ%)+A%(1-AZ%)]+Cw+Tw
本文所述的WSN節(jié)點(diǎn)在相同的硬件平臺(tái)上通過(guò)軟件方式實(shí)現(xiàn)多種通信模式,獲得不同的系統(tǒng)靈敏度,具有靈活的適應(yīng)性,且具有干擾檢測(cè)避免的功能,適合各種復(fù)雜環(huán)境下的通信,還具有小體積低功耗的特點(diǎn),滿足WSN節(jié)點(diǎn)要求。
責(zé)任編輯:gt
-
dsp
+關(guān)注
關(guān)注
552文章
7962瀏覽量
348252 -
控制器
+關(guān)注
關(guān)注
112文章
16197瀏覽量
177395 -
無(wú)線傳感器
+關(guān)注
關(guān)注
15文章
770瀏覽量
98311
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
C51RF-WSN無(wú)線傳感器網(wǎng)絡(luò)
網(wǎng)絡(luò)化測(cè)控系統(tǒng)的特點(diǎn)和實(shí)現(xiàn)
WSN微型節(jié)點(diǎn)怎么實(shí)現(xiàn)?
無(wú)線傳感器網(wǎng)絡(luò)系統(tǒng)的軟件設(shè)計(jì)有什么重點(diǎn)?
基于S12的無(wú)線傳感器網(wǎng)絡(luò)樣機(jī)的系統(tǒng)設(shè)計(jì)
請(qǐng)問(wèn)怎么設(shè)計(jì)一種分布式無(wú)線測(cè)控系統(tǒng)?
如何去設(shè)計(jì)一種USB2.0無(wú)線測(cè)控網(wǎng)絡(luò)?
如何去實(shí)現(xiàn)無(wú)線傳感器網(wǎng)絡(luò)系統(tǒng)的節(jié)點(diǎn)模塊化設(shè)計(jì)?
基于SX52 的單片機(jī)測(cè)控網(wǎng)絡(luò)系統(tǒng)研究
智能小區(qū)的網(wǎng)絡(luò)系統(tǒng)設(shè)計(jì)
基于CAN總線的雷達(dá)網(wǎng)絡(luò)測(cè)控系統(tǒng)設(shè)計(jì)
無(wú)線傳感器網(wǎng)絡(luò)關(guān)鍵技術(shù)及現(xiàn)狀
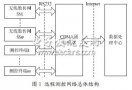
基于無(wú)線數(shù)據(jù)傳輸與CDMA的遠(yuǎn)程測(cè)控網(wǎng)絡(luò)
nRf2401+CP2102實(shí)現(xiàn)USB2.0無(wú)線測(cè)控網(wǎng)絡(luò)

基于微機(jī)與單片機(jī)的微機(jī)管理測(cè)控網(wǎng)絡(luò)系統(tǒng)設(shè)計(jì)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論