 智能導航技術如何掃清掃地機器人普及最后一道障礙?
智能導航技術如何掃清掃地機器人普及最后一道障礙?
近幾年掃地機器人異常火熱,銷量屢創新高,逐漸成為中國家庭中常見生活家電。掃地機器人從誕生那天算起,已有近20年的歷史,可長期處于叫好不叫座的狀態,直至智能導航技術應用才掃除了掃地機器人普及最后一道障礙。
慣性導航的不足
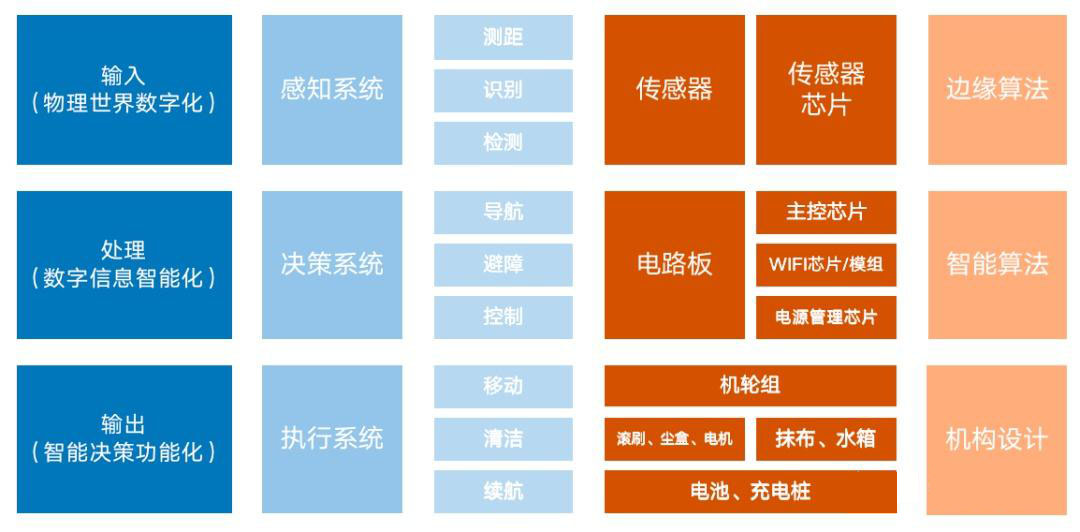
掃地機器人是一個高度集成的家用電器,由傳感器、行動裝置、電池、風機、集塵盒多個零部件組成,能夠自動完成清潔、充電等工作。不過初期掃地機器人導航系統非常簡單,采用的是內置陀螺儀、加速計、計數器組成的慣性導航系統。限于成本問題,機器人內部各種傳感器精度不高,而且容易受到環境因素干擾,結果掃地機器人行走時間越久誤差越高,遇到障礙物拐彎時方向容易偏移,結果掃地機器人工作時像一只無頭蒼蠅,到處亂跑,經常出現重復清潔或是遺漏清潔問題。

視覺導航革新
由于慣性導航種種不足,掃地機器人制造商開始尋求在機器人表面安裝傳感器,提升導航精度,目前主要分為激光導航與視覺導航兩個流派。iRobot作為掃地機器人創始人,很早就嘗試就嘗試這一技術方向,在2015年推出了首款視覺導航技術的Roomba 980,它結合了iAdapt 2.0智能導航技術與vSLAM技術,大幅度提升導航效果。其后在Roomba i7+中,iAdapt智能導航技術升級到3.0版。
在Roomba i7+頂部集成了一個攝像頭,它藏在一個下陷的窗口當中,保證機器人在穿越沙發、床等低矮家具時不會刮花鏡頭。與其它視覺導航技術掃地機器人不同的是,攝像頭不是面向地面,而是傾斜向上,用來拍攝家居環境的,每秒能夠捕捉超過23萬個數據點。
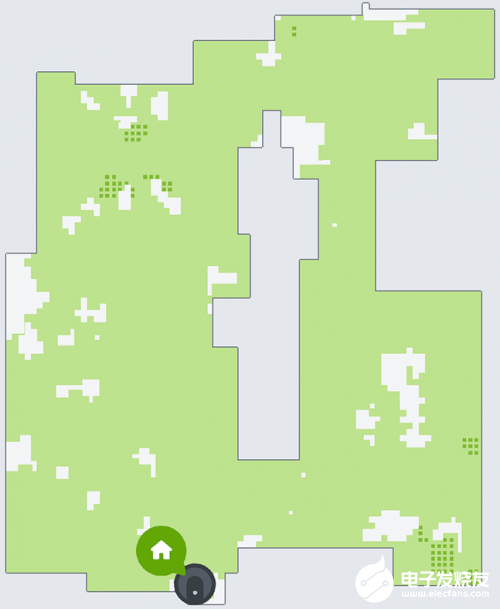
通過這些數據,Roomba i7+能夠識別周邊物體,比如桌子、沙發、睡床,然后選擇幾個特定物體作為參考物,在行走時測量自己與參考物的方位、距離變化,判斷出自己所在,原理與星光導航有幾分相似。而且定位數據與機器人內部的慣性導航系統、vSLAM技術結合后,能大幅度提升導航精度,因此在Roomba i7+完成初次清潔,即可建立一張精確、自動劃分好區域的清潔地圖,而且隨著清掃次數的積累,機器人會更加了解家庭環境布置,不斷改善清掃效率。
相比激光導航,視覺導航技術上更為復雜,激光導航技術核心是激光發射器與傳感器,只能測量一個水平上的距離數據,技術簡單、容易實現,但缺點顯而易見——無法識別空間的特征數據,對空間識別能力差于視覺導航,而且激光發射器工作范圍有限,一旦空間變大其精度會迅速下降,此外突出機身的激光模塊會增加掃地機器人的厚度,影響機器人深入家具底部的能力。而視覺導航是通過攝像頭捕捉到三維立體空間,數據量大,需要高性能處理器從海量數據中分析出家具、墻壁等有用的信息,但勝在具備強勁的空間識別能力,不僅能用于室內,也能用于室外,更適應未來智能家居發展需求。
同時為了彌補頂部攝像頭沒有下視角度,更好清潔地面,Roomba i7+還搭載了Dirt Detect污垢探測技術,通過聲學+光學混合識別,檢測出地面上的嚴重污垢,讓機器人加強清潔,并把檢測到嚴重污垢區域反饋到清潔地圖上,讓用戶清楚掌握地面狀況。
總結
智能導航技術的出現,成功扭轉了消費者對掃地機器人亂跑的印象,掃清了它普及最后一道障礙。iRobot Roomba系列掃地機器人搭載了iAdapt 2.0智能導航技術、Dirt Detect污垢探測多項技術,更是將將精準導航與高效清潔整合在一起,大大提升了實用性。
發布評論請先 登錄
相關推薦
大疆或明年中期推出高端掃地機器人
霍爾開關在掃地機器人中的應用
掃地機器人的核心技術突破
掃地機器人避障技術的發展史
供應 英集芯IP2348,適用于掃地機器人解決方案的鋰電池同步降壓充電芯片
光耦知識分享‖探討光耦技術在掃地機器人的應用

其利天下技術·搭載無刷電機的掃地機器人的前景如何?
EPSON助力智能泳池清潔機器人導航

鴻蒙南向開發實戰:【智能掃地機】
掃地機器人CCC認證申請流程與其他產品的區別是什么?

視覺、激光、結構光?掃地機器人導航避障技術盤點
WB212F/WB202B WiFi+藍牙BLE模組掃地機器人方案
EPSON愛普生助力智能泳池清潔機器人導航方案應用






 工商網監
工商網監
評論