 基于STR-6無線數據傳輸模塊實現開放式數控系統的設計
基于STR-6無線數據傳輸模塊實現開放式數控系統的設計
采用無線通信技術的新型開放式數控系統由兩部分構成:一部分是可移動的掌上控制器,即數控PDA;另一部分則安裝于機床上,完成傳統的運動控制和PLC 功能,稱為嵌入式機床控制器。兩部分之間通過Wi- Fi(802.11)或藍牙(Bluetooth)接口實現移動通信,其結構框圖如圖1 所示。在這種模式下,現今數控系統中的很大一部分功能將被轉移到數控PDA 上。這些功能主要包括加工程序的編制、仿真與下載(包括手工編程和從CAD/CAM 工作站或臺式電腦上下載巨型加工程序)、機床調整、加工數據和機床狀態的采集以及和車間管理/調度服務器通信等。而機床控制器則主要執行實時運動控制和 PLC 功能。這種新型數控是真正的嵌入式系統,能大大降低數控系統的體積和成本。同時,通過數控PDA 也徹底改變了數控機床的操作模式,把以機器為中心改變為以人為中心。操作者無論在位置上還是在姿勢上都不再被機床所束縛。操作更方便,更舒適,也容易實現一人多機操作。
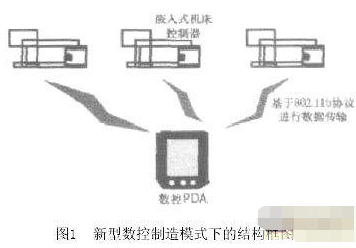
由于這種專業化的數控PDA可以通過無線局域網和Internet上網,獲得車間或單元服務器乃至CAD/CAM 技術中心的支持,因而極大的增強了數控系統的功能。同時,因為數控PDA 是一個通用的數控裝置,可以顯示多種機床的操作界面,控制不同的數控機床。由此,一個手握數控PDA的操作者和若干臺數控機床就能構成一個人機協同的加工單元。這種在數字技術支持下的以人為中心的加工單元,較之傳統的柔性加工單元更加靈活、更加可靠。此外,數控PDA 還具有本地數據庫管理功能,因而能用于組建車間網絡化制造的分布式數據庫,使之成為分布式體系結構中實時獲取現場數據的基礎結點。
1.1 數控PDA 的硬件結構
基于IEEE802.11 下的數控PDA 的硬件體系結構主要由32 位嵌入式微處理器、高速內存、FLSH電子盤、無線通信模塊以及高效電池和LCD 觸摸屏等部分組成(如圖2所示)。在硬件設計上采用Intel公司Strong ARM SA — 1100 32 位RISC 微處理器,它以ARM 公司的SA — 1 內核作為其系統內核,時鐘頻率高達206MHz,可以為數控PDA 提供強大的處理能力。
在通信方面,數控PDA 提供了USB 接口、串行接口和無線通信模塊。通過這些接口可以方便地與上級服務器或嵌入式機床控制器進行數據通信。無線模塊采用Airgo公司的支持 IEEE802.11a/b/g 3 種無線LAN 標準的收發器芯片組。該芯片組可同時支持2.4GHz 和5GHz 頻帶下的OFDM(正交頻分多路復用)變頻方式。除了IEEE802.11a/b,還可支持最近作為標準剛剛獲得通過的IEEE802.11g。

IEEE802.11g是利用2.4GHz頻帶來實現最大數據傳輸速度54Mbit/ 秒的無線LAN 規格。該芯片組由基帶芯片和R F 芯片組成,支持使用5 G H z 帶寬的IEEE802.11a、使用2.4GHz 帶寬的IEEE802.11b 及IEEE802.11g 的無線LAN 方式。基帶芯片帶有IEEE802.11 的MAC 功能和PHY 功能,并進行MIMO信號處理。同時,該芯片組嵌入了IEEE802.11的安全功能加速器及服務質量(QoS)保證電路。
如圖2 所示,數控PDA的主設備是由微處理器和IEEE802.11芯片組構成。IEEE802.11芯片組接受來自主機的控制指令,經過基帶控制器的處理后命令無線收發器發出2.4-5.0GHz 帶寬的無線電波。IEEE802.11 芯片組和主機的連接可以通過USB、MINI PCI,CARDBUS,從而省去所需外部橋接器件。HCI(Host Controller Interface)的上層通信協議由主機負責處理,下層的通信協議則由芯片組內的基帶層芯片與無線收發器芯片負責。數控PDA 可與嵌入式機床控制器802.11無線網卡進行數據傳輸和對數控機床進行控制。
由于把主要的系統管理功能、人機交互和數控編程等轉移給了數控PDA,因而新型數控的機床控制部分比傳統的數控設備簡化了許多,近似于一個運動控制器和PLC。其硬軟件配置主要滿足伺服系統實時控制和機床I/O 功能的要求,但它必須增加無線通信的功能模塊。在硬件上,采用基于104 總線的嵌入式工控PC機的體系結構。這種體系結構不僅能完全滿足上述要求,而且具有體積小、結構緊湊、堅固可靠和成本低等特點,不失為一種較理想的選擇。
1.2 數控PDA 的軟件結構
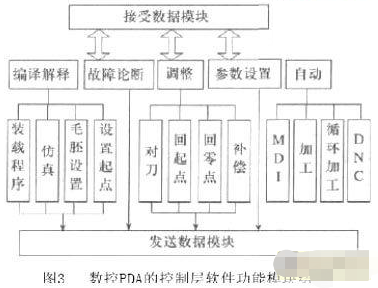
當前用于掌上電腦上的嵌入式操作系統有很多, 較典型的有Windows CE、Pocket OS、Palm OS、Hopen、嵌入式Linux 等。Windows CE.NET 作為目前掌上電腦的是一個基于Win32應用程序編程接口(API)的操作系統。我們采用Windows CE.NET 和Visual Studio.Net分別作為數控PDA的操作系統平臺和應用程序開發平臺。整個軟件系統按功能模塊進行設計。系統實現分為3 個層次,分別是人機界面和系統管理層、數據組織與管理層、與上級服務器及下級嵌入式機床控制器進行通信的通信層。通信層包括了通信鏈路的建立、數據鏈路通信協議的實現、表示層的具體實現。數據庫管理完成數據的建立、排序、檢索與維護,實現真正的移動傳輸。系統的控制管理層是整個軟件系統的核心,對于數控 PDA 來說,其功能和智能化程度的區別都反映在這一層上,系統功能的增減也均在這一層進行,包括程序的編譯解釋、調整、自動、診斷、參數設置、仿真等與用戶操作有關的功能子模塊。
各功能模塊通過無線通信程序與底層進行信息交換。其軟件功能模塊結構如圖3 所示。通信層采用串口,USB 和無線通信口3 種通信方式。串口通信方式采用RS232串行總線技術,全雙工,傳送波特率為57600bps;USB 通信方式采用USB2.0 高速通用串行總線,傳送速率可高達480Mbps;無線通信方式遵循IEEE802.11 通信協議,支持最高傳輸速率為54Mbps。整個系統的應用軟件具有控制、數據處理、人機交互、網絡通訊等功能。
2.新型數控中無線通信技術
2.1 802.11通信機制
目前常用的掌上電腦的無線聯網方式有GPRS, IEEE802.11(Wi-Fi),藍牙技術、家庭網絡HOMERF 等。這些方式各有優劣。IEEE802.11 是1999 年最新版本的無線局域網(WLAN)標準。與藍牙協議和家庭網絡的HOME RF 標準相比IEEE802.11 協議具有傳輸距離遠,傳輸速度快等優點,是無線通信技術發展的主流。和其他IEEE802.x 標準一樣,802.11 標準著重定義了物理層(PHY)和介質訪問控制(MAC)子層。IEEE802.11 的MAC 層提供對無線共享介質的訪問控制。除此之外,還提供支持無線傳輸和站點移動所必須的網絡連接、認證、保密和電源管理等功能。近年來,802.11標準又擴展出802.11b、802.11a、802.11g等系列,這些擴展標準采用的是不同的物理層標準,使通信速率提高到11Mbit/s、22 Mbit/s至54 Mbit/s,但它們對MAC層協議沒有重大改變。
2.2 新型數控中無線通信的具體實現方案
在新型數控體系結構中,數控P D A 是通過IEEE802.11x 通信協議與車間服務器及機床控制器通信。根據機床控制系統的不同配置,其無線通信的實現方案也不同。主要有以下幾種:
(1) 數控PDA的無線模塊和單片機數控系統相連的無線通信接口電路;
(2) 數控PDA的無線模塊通過與傳統數控系統的RS232/802.11轉換器相連接;
(3) 通過數控PDA的無線模塊與嵌入式機床控制器的802.11x無線網卡通信。
在單片機數控系統中,通過一種基于單片機無線通訊接口電路來實現數控PDA 與單片機的無線通信。這種單片機無線通訊接口電路是由Micrel公司推出的單片發射器芯片(MICRF102)和單片接受器芯片(MICRF007)組成。工作在國際通用ISM 頻段300~400MHZ,具有ASK 調制和解調能力,抗干擾能力強,非常適合于工業控制領域。同時它又具備頻率穩定性好,接受靈敏度高,功耗底等優點。可以方便數控PDA 與單片機之間的串行數據無線通信。其接口電路工作原理如圖4 所示。

對于傳統數控機床來說,通常這些設備所提供的通信接口是普通的RS-232串行接口。如何使這些設備與數控PDA 通信呢?一個經濟、快速的解決方案是,在傳統數控系統的串行接口上外接一個RS-232/802.11轉換器,將數控設備的串口RS-232信號與無線通信信號相互轉換,使之符合IEEE 802.11x通信協議。它使數控設備與無線局域網聯網,有效地擴展了數控設備的聯網通信能力,并且最終使固定的數控設備可以與自由移控動的數控PDA實現無線通信。
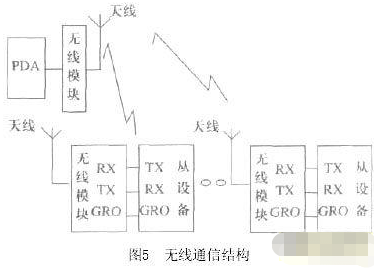
總而言之一種基于IEEE 802.11協議下的無線串口是網絡環境下的數字化制造的重要趨勢。其無線通信結構見圖5所示。二者間無線通信的實現,實際上可以看作是用無線模塊替代有線串口連接,亦既將兩個無線模塊組成的無線信道看成是一個兩端口的設備。對兩設備而言,串口通信時有線連接與無線連接的端子對應關系是一樣的。用無線信道替代有線連接的通信程序編制也基本相同。但需要注意以下幾點:
(1) 在有線連接的通信程序中串口幀格式、串口速率可任意設置。連接線本身對上述兩個參數無限制。而在無線模塊中這兩個參數為一固定值,因此這兩個參數要與無線模塊的設置一致。
(2) 有線連接時,發端發出數據的時刻與收端收到數據的時刻無時間間隔。而無線模塊在發送數據時要進行收發轉換及時鐘同步,所以在無線通信時主設備發出數據的時刻與從設備收到數據的時刻有時間間隔。
(3) 有線連接時串口通信是全雙工的。無線模塊的通信是雙向半雙工的。因此在通信編程時應進行控制將收發的時間錯開。
對于當代的開放式數控系統來說,可以在通用的操作系統支持下實現標準的和功能強大的無線通信。目前國內外的開放式數控系統所采用的操作系統,一種是基于DOS,另一種是基于Windows98/NT。DOS 是運行于16 位實模式下的單任務操作系統,實時性好,但受16位實模式的限制,難以實現高效可靠的網絡尤其是無線網絡通信的要求;Windows98/NT 功能強大,但體系結構龐大,實時性差,不能滿足數控要求。Windows CE.NET 是微軟推出的新一代嵌入式操作系統,具有較強的實時性,兼備DOS 和Windows 的優點,“小而精”,是完全開放的模塊化體系結構,支持藍牙和802.11x無線通信協議以及友好的圖形界面。考慮到Microsoft公司的產品有更多技術支持和可利用的資源,結合我們幾年的研究基礎和應用經驗,因此我們選其作為新型數控系統的嵌入式機床控制器的操作系統平臺。硬件采用104總線的工業控制主板加802.11x無線網卡,實現與數控PDA 無線模塊的無線通信。
2.3 STR-6無線數據傳輸模塊介紹
我們選用上海桑博科技有限公司生產的STR-6無線收發模塊作為實現數控PDA 與傳統數控機床的RS-232串口的無線通信。它具有微功率發射、高抗擾能力和低誤碼率、傳輸距離遠、多信道、大緩沖區等優點。它提供標準的RS- 232,RS-485 和UART/TTL 電平3 種接口方式,可直接與計算機、用戶的RS-485 設備、單片機或其他UART 器件連接使用。利用兩臺連有STR-6無線收發模塊的計算機可以在相距500 米距離以內實現無線傳輸功能。無線模塊的工作原理圖如圖6 所示。

STR -6無線收發模塊通信實現方法:無線模塊A在發送數據之前首先發送握手信號給對方無線模塊B,無線模塊B 收到握手信號后反饋一個應答信號。若無線模塊A收不到正確的反饋應答信號,表明雙方沒有正常建立無線通信連接,無線模塊A 則繼續發送握手信號直到收到反饋信號為止。無線模塊A 收到反饋信號后開始發送數據。無線模塊B 根據所接受的信息,將數據存儲在用戶所指定的路徑下,完成整個無線通信過程。
責任編輯:gt
-
轉換器
+關注
關注
27文章
8639瀏覽量
146893 -
接口
+關注
關注
33文章
8526瀏覽量
150861 -
無線
+關注
關注
31文章
5437瀏覽量
173103
發布評論請先 登錄
相關推薦
什么是開放式數控系統?有哪些應用?
資料下載;于LINUX的開放式結構數控系統組成及特點
開放式數控系統硬件平臺設計
開放式數控系統硬件平臺設計
基于PC的開放式數控系統體系的應用分析
基于Windows CE.NET的開放式數控系統研究

基于MPC08運動控制器實現開放式數控系統的設計方案
什么是開放式數控系統?





 工商網監
工商網監
評論